Download as pdf or txt
You might also like
- Trigonometry: "The Established Leader in Ee Review" Legit Multivector Review and Training CenterDocument6 pagesTrigonometry: "The Established Leader in Ee Review" Legit Multivector Review and Training CenterJohn RatillaNo ratings yet
- Lab 6 - Learning System Identification Toolbox of Matlab PDFDocument11 pagesLab 6 - Learning System Identification Toolbox of Matlab PDFAnonymous 2QXzLRNo ratings yet
- EC2255-Solved Problems in Control Systems PDFDocument182 pagesEC2255-Solved Problems in Control Systems PDFmaheshbabu527100% (2)
- M4 Cluster IV Inverse Z TransformsDocument30 pagesM4 Cluster IV Inverse Z Transformssatyaroopbankuru06No ratings yet
- Patter Recognition (Spring 2012) Midterm Exam SolutionDocument4 pagesPatter Recognition (Spring 2012) Midterm Exam SolutionranaNo ratings yet
- Sec4 3 Numerical - IntegrationDocument7 pagesSec4 3 Numerical - IntegrationFlorinNo ratings yet
- Samaniego, Jjs Ece4014b Bhq#4Document11 pagesSamaniego, Jjs Ece4014b Bhq#4BrooklynPrinceNo ratings yet
- Integration by Partial FractionsDocument19 pagesIntegration by Partial FractionsKd HaducaNo ratings yet
- Solution Separation of Variables: Final Examination ENGR 311/2 2010Document13 pagesSolution Separation of Variables: Final Examination ENGR 311/2 2010Jonathon Raymond-SzewczukNo ratings yet
- Advanced Mathematics Assign-2-1Document7 pagesAdvanced Mathematics Assign-2-1Maalmalan KeekiyyaaNo ratings yet
- Legendre Eqnation WriteupDocument10 pagesLegendre Eqnation WriteupHammed LawalNo ratings yet
- Leibniz Rule+jacobian and Jacobian TheoremDocument6 pagesLeibniz Rule+jacobian and Jacobian Theoremعـلي محمد بعنونNo ratings yet
- Question No. 1 (20 Marks) .: SolutionDocument6 pagesQuestion No. 1 (20 Marks) .: SolutionJonathon Raymond-SzewczukNo ratings yet
- BB202 Lecture 1Document8 pagesBB202 Lecture 1Uyên PhạmNo ratings yet
- Solve The Following Initial Value Problem Using The Laplace Transforms MethodDocument6 pagesSolve The Following Initial Value Problem Using The Laplace Transforms MethodJonathon Raymond-Szewczuk100% (1)
- Module 12CDocument3 pagesModule 12CAjay MalikNo ratings yet
- Taylor and Laurent Series.Document3 pagesTaylor and Laurent Series.maNo ratings yet
- Solutions To Maths AssignementDocument14 pagesSolutions To Maths AssignementJoseph DakaNo ratings yet
- Calculus 3Document6 pagesCalculus 3Lưu Thiên ThanhNo ratings yet
- Calculus 3: Chapter 1: Complex AnalysisDocument6 pagesCalculus 3: Chapter 1: Complex AnalysisDuc Anh TranNo ratings yet
- Stat 441 & Stat 601 I.A 2 Solns 17-18Document8 pagesStat 441 & Stat 601 I.A 2 Solns 17-18TennysonNo ratings yet
- Formula Sheet Final 18 EE 555Document6 pagesFormula Sheet Final 18 EE 555Ali KumailNo ratings yet
- ON THE Calculation OF Deflection of A Semitrailer Chassis Under Various Loading Conditions: An Experimental and Numerical InvestigationDocument11 pagesON THE Calculation OF Deflection of A Semitrailer Chassis Under Various Loading Conditions: An Experimental and Numerical InvestigationYãbeçk MâmNo ratings yet
- A.P. Calculus (AB) : Summer Assignment 2013Document8 pagesA.P. Calculus (AB) : Summer Assignment 2013lesmisphantomphanNo ratings yet
- Lecture Note Summer 19-20 PDFDocument8 pagesLecture Note Summer 19-20 PDFSaikat GhoshNo ratings yet
- Lecture-9-Distribution FunctionDocument7 pagesLecture-9-Distribution FunctionSudip Bal LamaNo ratings yet
- Inverse Trigonometric FunctionsDocument11 pagesInverse Trigonometric FunctionsSamir GedamNo ratings yet
- Fem 196103106-2Document1 pageFem 196103106-2debajit dasNo ratings yet
- Miscellaneous SubstitutionDocument1 pageMiscellaneous SubstitutionRuiz AnneNo ratings yet
- Ojsadmin,+Journal+Editor,+58 Article+Text 66 1-2-20171128Document8 pagesOjsadmin,+Journal+Editor,+58 Article+Text 66 1-2-20171128محمد المهندسNo ratings yet
- Gamma DistributionDocument4 pagesGamma DistributionKavi SanjaiNo ratings yet
- Solution of Nonlinear Fractional Differential Equations Using The Homotopy Perturbation Sumudu Transform MethodDocument16 pagesSolution of Nonlinear Fractional Differential Equations Using The Homotopy Perturbation Sumudu Transform MethodTeferiNo ratings yet
- Tutorial 1 AnswerDocument8 pagesTutorial 1 Answer00S GROUP JUNIOR MANAGEMENT PTNo ratings yet
- Observadores de EstadoDocument28 pagesObservadores de Estadojanett miriam uribarri espinozaNo ratings yet
- Calculus and Linear AlgebraDocument27 pagesCalculus and Linear AlgebraIrfan AhmedNo ratings yet
- Chap 10 Solutions Ex 10 2 Method Umer AsgharDocument17 pagesChap 10 Solutions Ex 10 2 Method Umer AsgharSikandar Khan100% (3)
- Fem 196103106Document9 pagesFem 196103106debajit dasNo ratings yet
- Numerical Methods-Module On False Position MethodDocument4 pagesNumerical Methods-Module On False Position MethodMaria ThereseNo ratings yet
- Solutions+of+Workshop+1+ (1.1 1.2)Document5 pagesSolutions+of+Workshop+1+ (1.1 1.2)SomayahNo ratings yet
- Workshop Solutions To Sections 1.1 and 1.2Document5 pagesWorkshop Solutions To Sections 1.1 and 1.2Most de 2No ratings yet
- Harmonic OscillatorDocument9 pagesHarmonic OscillatorLinNo ratings yet
- Propagation of Plane and Spherical Waves in A Medium With Broken UnloadingDocument5 pagesPropagation of Plane and Spherical Waves in A Medium With Broken UnloadingAcademic JournalNo ratings yet
- A Discussion On "Wiener - Khinchin Theorem and Its Applications"Document4 pagesA Discussion On "Wiener - Khinchin Theorem and Its Applications"Harsh Purwar100% (1)
- 1Document6 pages1duhok9670No ratings yet
- Formula Sheet NM-SP22Document2 pagesFormula Sheet NM-SP22Momina ShakeelNo ratings yet
- Derivative of A ConstantDocument3 pagesDerivative of A ConstantRachel Mae FajardoNo ratings yet
- Maths 4 NOTESDocument127 pagesMaths 4 NOTESChetan PawarNo ratings yet
- Ctanujit Classes of Mathematics Statistics & Economics: MSQMS 2014 Solution Paper QMA (Mathematics)Document9 pagesCtanujit Classes of Mathematics Statistics & Economics: MSQMS 2014 Solution Paper QMA (Mathematics)Shayan Sen GuptaNo ratings yet
- Mathematical Circle 6Document2 pagesMathematical Circle 6Hameer AbbasiNo ratings yet
- FEG 404 2nd Lecture ApprovedDocument24 pagesFEG 404 2nd Lecture ApprovedChuka ObodozieNo ratings yet
- PWMin Power MetersDocument9 pagesPWMin Power MetersMylavarapu SriprithamNo ratings yet
- 2.7 Curves in Space: DefinitionsDocument6 pages2.7 Curves in Space: Definitionsعـلي محمد بعنونNo ratings yet
- Centrifugal Compressors: Relations of TurbomachinesDocument4 pagesCentrifugal Compressors: Relations of Turbomachinesامير ماجد العامريNo ratings yet
- Taller Vectorial 2Document8 pagesTaller Vectorial 2Camilo Buelvas SotoNo ratings yet
- 13 Expected Values - ContinuousDocument3 pages13 Expected Values - ContinuousKavi SanjaiNo ratings yet
- Phy 4201 (2) 1Document4 pagesPhy 4201 (2) 1Emon HossainNo ratings yet
- Basic Principles of Numerical Analysis: Chapter TWODocument33 pagesBasic Principles of Numerical Analysis: Chapter TWONIVEDAN MAHATONo ratings yet
- Solid Slab Bridge Design Example 39 2015 - 13-14Document2 pagesSolid Slab Bridge Design Example 39 2015 - 13-14Hamlity SaintataNo ratings yet
- Ctanujit Classes of Mathematics Statistics & Economics: MSQMS 2015 Solution Paper QMA (Mathematics)Document14 pagesCtanujit Classes of Mathematics Statistics & Economics: MSQMS 2015 Solution Paper QMA (Mathematics)Shayan Sen GuptaNo ratings yet
- Applied RVE Reconstruction and Homogenization of Heterogeneous MaterialsFrom EverandApplied RVE Reconstruction and Homogenization of Heterogeneous MaterialsNo ratings yet
- Control Chapter 4Document17 pagesControl Chapter 4Ali MadridNo ratings yet
- Lesson 4Document36 pagesLesson 4Ali MadridNo ratings yet
- Control Chapter 5Document32 pagesControl Chapter 5Ali MadridNo ratings yet
- Lec. No. 11 (Ch.6) Automatic Control Engineering (25 Junel 2020) PDFDocument22 pagesLec. No. 11 (Ch.6) Automatic Control Engineering (25 Junel 2020) PDFAli MadridNo ratings yet
- Internal Combustion Engines: Ali Waleed JaafarDocument5 pagesInternal Combustion Engines: Ali Waleed JaafarAli MadridNo ratings yet
- Lec. No. 10 Control (18 June 2020)Document40 pagesLec. No. 10 Control (18 June 2020)Ali MadridNo ratings yet
- Lec. No. 07 Control (14 May 2020)Document15 pagesLec. No. 07 Control (14 May 2020)Ali MadridNo ratings yet
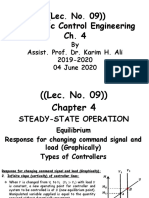
- ( (Lec. No. 09) ) Automatic Control Engineering: by Assist. Prof. Dr. Karim H. Ali 2019-2020 04 June 2020Document20 pages( (Lec. No. 09) ) Automatic Control Engineering: by Assist. Prof. Dr. Karim H. Ali 2019-2020 04 June 2020Ali MadridNo ratings yet
- Specifications:, C R: - LLDocument3 pagesSpecifications:, C R: - LLAli MadridNo ratings yet
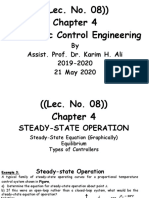
- By Assist. Prof. Dr. Karim H. Ali 2019-2020 21 May 2020Document17 pagesBy Assist. Prof. Dr. Karim H. Ali 2019-2020 21 May 2020Ali MadridNo ratings yet
- Transportation, Assignment: Ali Waleed JaafarDocument4 pagesTransportation, Assignment: Ali Waleed JaafarAli MadridNo ratings yet
- Project Report 1Document27 pagesProject Report 1Ali MadridNo ratings yet
- Performance of The Four Strokes Diesel EngineDocument12 pagesPerformance of The Four Strokes Diesel EngineAli MadridNo ratings yet
- Pinion: Air Pressure Inlet Aneroid Capsules Backlash Spring Sector GearsDocument1 pagePinion: Air Pressure Inlet Aneroid Capsules Backlash Spring Sector GearsAli MadridNo ratings yet
- Introduction To CorrosionDocument17 pagesIntroduction To CorrosionAli MadridNo ratings yet
- Transportation, Assignment: Ali Waleed JaafarDocument4 pagesTransportation, Assignment: Ali Waleed JaafarAli MadridNo ratings yet
- Refrigeration H.W 1Document3 pagesRefrigeration H.W 1Ali MadridNo ratings yet
- Home WorkDocument1 pageHome WorkAli MadridNo ratings yet
- I.E L.P 3Document2 pagesI.E L.P 3Ali MadridNo ratings yet
- Super Alloys: Cubic Austenitic and They Get Their Strength From Either SolidDocument4 pagesSuper Alloys: Cubic Austenitic and They Get Their Strength From Either SolidAli MadridNo ratings yet
- Steam Nozzle Experiment (Power Planet Lab)Document21 pagesSteam Nozzle Experiment (Power Planet Lab)Ali Madrid0% (1)
- Averaged Switch Modeling,: AC Equivalent Circuit ModelingDocument12 pagesAveraged Switch Modeling,: AC Equivalent Circuit ModelingJulián RincónNo ratings yet
- H, Control of The NRC Bell 205 Fly-by-Wire Helicopter: (A - 8. (A,,. Br2, C,,LDocument9 pagesH, Control of The NRC Bell 205 Fly-by-Wire Helicopter: (A - 8. (A,,. Br2, C,,LÉdgar StaveNo ratings yet
- DCT D CT A A Act DT DT DRT D RT B B BRT DT DT: Cs Cs GsrsDocument1 pageDCT D CT A A Act DT DT DRT D RT B B BRT DT DT: Cs Cs GsrsChelsea MartinezNo ratings yet
- Signals and Systems - MjrobertsDocument3 pagesSignals and Systems - Mjrobertspriyakanthr5883100% (1)
- Modeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoDocument13 pagesModeling, Simulation and Control of High Speed Nonlinear Hydraulic ServoJoseph JoseNo ratings yet
- Z Transform 2 of 3Document18 pagesZ Transform 2 of 3Gilbert SigalaNo ratings yet
- Control Notes P1 2Document12 pagesControl Notes P1 2kenji91No ratings yet
- Robot Modelling and Control PDFDocument10 pagesRobot Modelling and Control PDFalper senemNo ratings yet
- Process Dynamics and ControlDocument88 pagesProcess Dynamics and ControlGEOGINo ratings yet
- Design of Anti-Windup-Extensions For Digital Control LoopsDocument6 pagesDesign of Anti-Windup-Extensions For Digital Control Loopsfrank_grimesNo ratings yet
- Modern Control State Space Analysis and Design Methods Arie Nakhmani Full ChapterDocument67 pagesModern Control State Space Analysis and Design Methods Arie Nakhmani Full Chapterclyde.jacobson836100% (18)
- 351 - 27435 - EE418 - 2015 - 1 - 1 - 1 - 10 Lec10 EE418 DC Motor Control PDFDocument21 pages351 - 27435 - EE418 - 2015 - 1 - 1 - 1 - 10 Lec10 EE418 DC Motor Control PDFفحرلرز دیمسNo ratings yet
- Mathematical Modelling and Controller Design of Inverted PendulumDocument6 pagesMathematical Modelling and Controller Design of Inverted PendulumKuldeep KumarNo ratings yet
- 3-1 Control System PresentationDocument361 pages3-1 Control System PresentationBhavsingh Dharavath0% (1)
- Ect204 Signals and Systems, July 2021Document4 pagesEct204 Signals and Systems, July 2021Sourav SethuNo ratings yet
- JHVJHCDocument12 pagesJHVJHCPoovarashan ManimaranNo ratings yet
- Adaptive Constant On-Time (D-CAP™) Control Study inNotebookApps - Slva281bDocument9 pagesAdaptive Constant On-Time (D-CAP™) Control Study inNotebookApps - Slva281bMalli ArjunNo ratings yet
- High Speed Power TransferDocument33 pagesHigh Speed Power TransferJAYKUMAR SINGHNo ratings yet
- Avoiding The Parametric RollDocument6 pagesAvoiding The Parametric RollSpeedbirdNo ratings yet
- A Control Design Approach For Three-Phase Grid-Connected Renewable Energy Resources PDFDocument10 pagesA Control Design Approach For Three-Phase Grid-Connected Renewable Energy Resources PDFSureshNo ratings yet
- Dokumen - Tips - Dynamic Systems Mechanical SystemsDocument64 pagesDokumen - Tips - Dynamic Systems Mechanical SystemsAnas AlsayarNo ratings yet
- VibrationDocument136 pagesVibrationSuba GuhanNo ratings yet
- Control Systems Unit 4Document38 pagesControl Systems Unit 4Tumelo TumisangNo ratings yet
- Conservation Equations and Modeling of Chemical and Biochemical ProcessesDocument650 pagesConservation Equations and Modeling of Chemical and Biochemical ProcessesArman BasmacıoğluNo ratings yet
- 5th Sem DEPMDocument100 pages5th Sem DEPMSuryaCharanPaidipalliNo ratings yet
- Simple Modeling and Identification Procedures For " Black-Box " Behavioral Modeling of Power Converters Based On Transient Response Analysis - 2009Document15 pagesSimple Modeling and Identification Procedures For " Black-Box " Behavioral Modeling of Power Converters Based On Transient Response Analysis - 2009dsafhNo ratings yet
- Control Systems - Lecture NoteDocument190 pagesControl Systems - Lecture NoteAbenezer AchamyelehNo ratings yet
- R7411008-Digital Control SystemsDocument4 pagesR7411008-Digital Control SystemssivabharathamurthyNo ratings yet