Download as pdf or txt
You might also like
- Spur and Helical Gear DesignDocument45 pagesSpur and Helical Gear Designkibromgidey12No ratings yet
- CH 14Document13 pagesCH 14mssaber77No ratings yet
- Design of Spur Gear and Helical Gear (Week 05-06)Document74 pagesDesign of Spur Gear and Helical Gear (Week 05-06)Muhammad Zohaib AliNo ratings yet
- ME364-04 Spur Helical GearsDocument67 pagesME364-04 Spur Helical GearsPuBg PrONo ratings yet
- ME364-04 Spur Helical GearsDocument51 pagesME364-04 Spur Helical Gearsqaps lrkNo ratings yet
- Design of Spur GearDocument23 pagesDesign of Spur GearNiaz KhanNo ratings yet
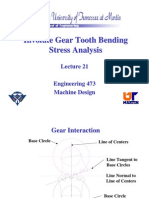
- Involute Gear Tooth Bending Stress AnalysisDocument24 pagesInvolute Gear Tooth Bending Stress AnalysisVeerasamy SureshbabuNo ratings yet
- ABC11Document7 pagesABC11Ahmad SaeedNo ratings yet
- Unit - I: Stresses and Strain (Simple and Principal)Document65 pagesUnit - I: Stresses and Strain (Simple and Principal)PunitSinghNo ratings yet
- ME 4131 Notes 1Document4 pagesME 4131 Notes 1jaz squaredNo ratings yet
- Interface ShearDocument17 pagesInterface ShearParikshit JoshiNo ratings yet
- Adobe Scan 21 Nov 2023Document6 pagesAdobe Scan 21 Nov 2023Shivam VermaNo ratings yet
- Pengujiantarikmemetppt 110213233821 Phpapp01Document43 pagesPengujiantarikmemetppt 110213233821 Phpapp01Ibnu FajarNo ratings yet
- Materials Summary of Eqns PDFDocument4 pagesMaterials Summary of Eqns PDFJamie TranNo ratings yet
- m1. Analysis of Normal Bearing Stresses 1-25-2023Document13 pagesm1. Analysis of Normal Bearing Stresses 1-25-2023Novie Dave EstremaduraNo ratings yet
- Mechanical Properties of Metals: ความเครียด การเสียรูป (deformation)Document46 pagesMechanical Properties of Metals: ความเครียด การเสียรูป (deformation)ภาคภูมิ เหมยากรNo ratings yet
- Capitulo 1-DDocument30 pagesCapitulo 1-DIranis E Lugo RodriguezNo ratings yet
- Experiment # 1: Modulus of Rigidity of The RubberDocument6 pagesExperiment # 1: Modulus of Rigidity of The RubberUsamaNo ratings yet
- Chapter 4 Strenth of MaterialsDocument23 pagesChapter 4 Strenth of Materialsbenyahiaabderraouf9No ratings yet
- Pitting Resistance Rating in AGMA, ISO and BSDocument8 pagesPitting Resistance Rating in AGMA, ISO and BSVarundeep Merugu NethaNo ratings yet
- Mech Spring 2024Document42 pagesMech Spring 2024ma2695633No ratings yet
- 01 Fundamentals of Metal FormingDocument26 pages01 Fundamentals of Metal FormingPanNo ratings yet
- Stress Strain RelationDocument29 pagesStress Strain RelationZuhair QamarNo ratings yet
- 0.1 Formulas - PSAD Sir CanoyDocument24 pages0.1 Formulas - PSAD Sir CanoyEvangelin GuardamanoNo ratings yet
- Module 7: Planes of Weakness in Rocks: 7.2.10 Joint Friction AngleDocument4 pagesModule 7: Planes of Weakness in Rocks: 7.2.10 Joint Friction Angleفردوس سليمانNo ratings yet
- Shear in Bending PDFDocument18 pagesShear in Bending PDFChakraphan WuttimuagkwanNo ratings yet
- Chapter 1c Stress and Strain (Allowable Stress and Bending Stress)Document37 pagesChapter 1c Stress and Strain (Allowable Stress and Bending Stress)sp-ahmadfareedmohdkarimNo ratings yet
- Lecture Note UNIT 4Document11 pagesLecture Note UNIT 4Prateek BhardwajNo ratings yet
- Gear Agma IIDocument49 pagesGear Agma IInathNo ratings yet
- Strength of Materials FormulasDocument4 pagesStrength of Materials FormulasDeo WarrenNo ratings yet
- Glass Fundamentals 1B - The Strength of Glass - 19-09-2018Document9 pagesGlass Fundamentals 1B - The Strength of Glass - 19-09-2018brizguy2022No ratings yet
- Sign Convention For Stress and Strain 2. Poisson's Ratio and Shear Modulus 3. Volume Change and Dilatation 4. Allowable Stress and Allowable LoadDocument26 pagesSign Convention For Stress and Strain 2. Poisson's Ratio and Shear Modulus 3. Volume Change and Dilatation 4. Allowable Stress and Allowable LoadtalhafirozNo ratings yet
- CH 15: Bevel and Worm GearsDocument7 pagesCH 15: Bevel and Worm Gearsmkiani2No ratings yet
- Experiment 1 UzairDocument7 pagesExperiment 1 UzairUzair IqbalNo ratings yet
- Modul Ansys Stress Mechtech - v2Document39 pagesModul Ansys Stress Mechtech - v2Adiska SafiraNo ratings yet
- Mekanikal (Khor) (3CH)Document53 pagesMekanikal (Khor) (3CH)EladAquinoNo ratings yet
- Gear StressDocument12 pagesGear StressPrithviraj Daga100% (1)
- Tooth Root StressDocument5 pagesTooth Root StressJitu Indu0% (1)
- Experiment 3 MOMDocument6 pagesExperiment 3 MOMHafiz HamzaNo ratings yet
- Bearing DesignDocument16 pagesBearing DesignOmar NajmNo ratings yet
- Technical Note Material Stress-Strain Curves: ©C S, I ., J 2008Document18 pagesTechnical Note Material Stress-Strain Curves: ©C S, I ., J 2008Roberto Carbajal BerrospiNo ratings yet
- Strength of Materials: Material PropertiesDocument3 pagesStrength of Materials: Material PropertieskhanNo ratings yet
- Machine Design I Learning Module I: Stress Analysis: Authored By: Engr. Ronnie Tavares Rat/8/17/2013/8:55 PMDocument32 pagesMachine Design I Learning Module I: Stress Analysis: Authored By: Engr. Ronnie Tavares Rat/8/17/2013/8:55 PMOtil SeravatNo ratings yet
- Mechanical Properties 1Document27 pagesMechanical Properties 1Dr.Risalah A MohammedNo ratings yet
- Mechanical Properties of MaterialsDocument40 pagesMechanical Properties of MaterialsK.f. KamarudinNo ratings yet
- HP T N / 63000 T W W F: Transmitted Load, LBDocument35 pagesHP T N / 63000 T W W F: Transmitted Load, LBLayike Alemayehu100% (1)
- Tutorial 2 - Stress Strain Tensile TestingDocument28 pagesTutorial 2 - Stress Strain Tensile TestingZadrin TuckerNo ratings yet
- FatigueDocument29 pagesFatigueapi-3710585100% (1)
- Module 1 Basic Rock MechanicsDocument44 pagesModule 1 Basic Rock MechanicsMaría Marquina100% (1)
- Bevel GearsDocument1 pageBevel GearsBalasoobramaniam CarooppunnenNo ratings yet
- Week 2 Engineering Properties-Strength and Deformation CharacteristicsDocument6 pagesWeek 2 Engineering Properties-Strength and Deformation Characteristicselazabbahaa4No ratings yet
- 380 Formula SheetDocument9 pages380 Formula Sheetluong.hng43No ratings yet
- 1.introduction To Stresses & Strains PDFDocument48 pages1.introduction To Stresses & Strains PDFErNo ratings yet
- Vtu PG Centre Kalaburagi: Design Data HandbookDocument27 pagesVtu PG Centre Kalaburagi: Design Data HandbookMD NASEERUDDINNo ratings yet
- Modulus of RigidityDocument5 pagesModulus of RigidityMuhammad Talha Sajid Muhammad SajidullahNo ratings yet
- Gear Tooth Strength Analysis: 2006 by W.H.DornfeldDocument14 pagesGear Tooth Strength Analysis: 2006 by W.H.DornfeldlitonNo ratings yet
- Direct PWM Drive Brushless Pre-Driver For Household Appliance MotorsDocument17 pagesDirect PWM Drive Brushless Pre-Driver For Household Appliance MotorsnguoidiquaNo ratings yet
- Splash Sprint Aeration: Different SPRINT and SPLASH Models Have Been Developed To Deal With Different Water VolumesDocument2 pagesSplash Sprint Aeration: Different SPRINT and SPLASH Models Have Been Developed To Deal With Different Water VolumesnguoidiquaNo ratings yet
- Insects 11 00876Document13 pagesInsects 11 00876nguoidiquaNo ratings yet
- Sun Gear Data ListDocument5 pagesSun Gear Data ListnguoidiquaNo ratings yet
- Vibration Diagnosis & Analysis Report: Visit Us More atDocument8 pagesVibration Diagnosis & Analysis Report: Visit Us More atnguoidiquaNo ratings yet
- Ports Solution Cranes and Moving Machines: Tran Duy HoaiDocument35 pagesPorts Solution Cranes and Moving Machines: Tran Duy HoainguoidiquaNo ratings yet