
Free and Forced Vibrations of An Axially-Loaded Timoshenko Multi-Span Beam Carrying A Number of Various Concentrated Elements
Free and Forced Vibrations of An Axially-Loaded Timoshenko Multi-Span Beam Carrying A Number of Various Concentrated Elements
You might also like
- Becoming Telebirr AgentDocument147 pagesBecoming Telebirr AgentSami91% (34)
- 2018 AP Chem MOCK FRQ FROM B Score GuideDocument15 pages2018 AP Chem MOCK FRQ FROM B Score GuideLena Nikiforov100% (1)
- Design of Foundations For Dynamic LoadsDocument446 pagesDesign of Foundations For Dynamic LoadsJose Luis Velasco Cadavid100% (49)
- Test Exer 6Document3 pagesTest Exer 6Uratile PatriciaNo ratings yet
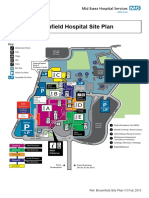
- Broomfield Hospital Site Plan: Café Shops Lifts Information PointsDocument1 pageBroomfield Hospital Site Plan: Café Shops Lifts Information Pointsady trader0% (2)
- Review of Measuring Methods and Results in Nonviscous Gas-Liquid Mass Transfer in Stirred VesselsDocument8 pagesReview of Measuring Methods and Results in Nonviscous Gas-Liquid Mass Transfer in Stirred VesselsAntonela PortaNo ratings yet
- Feasibility StudyDocument5 pagesFeasibility StudyKath Garcia50% (4)
- Resource Related Billing 01Document10 pagesResource Related Billing 01Suresh Nayak100% (2)
- Online Voting System SRSDocument7 pagesOnline Voting System SRSSanthosh KumarNo ratings yet
- Mca 15 00096 PDFDocument12 pagesMca 15 00096 PDFFarrukh RizwanNo ratings yet
- BANERJEE 2001 Journal of Sound and VibrationDocument19 pagesBANERJEE 2001 Journal of Sound and VibrationMohamed HachemiNo ratings yet
- Finite Element Analysis of Simple Rotors IITDocument33 pagesFinite Element Analysis of Simple Rotors IITjonathan mayNo ratings yet
- Beam VibrationDocument20 pagesBeam Vibrationhmsedighi459No ratings yet
- Dynamic Response of A Bernoulli-Euler Thin Beam Due To A Moving Mass Using Moving Finite ElementDocument15 pagesDynamic Response of A Bernoulli-Euler Thin Beam Due To A Moving Mass Using Moving Finite ElementIsmail EsenNo ratings yet
- Transverse Vibration of A Multiple-Timoshenko Beam System With Intermediate Elastic Connections Due To A Moving LoadDocument19 pagesTransverse Vibration of A Multiple-Timoshenko Beam System With Intermediate Elastic Connections Due To A Moving LoadgheinbaNo ratings yet
- On The Natural Frequencies and Mode Shapes of A Uniform Multi-Span Beam Carrying Multiple Point MassesDocument17 pagesOn The Natural Frequencies and Mode Shapes of A Uniform Multi-Span Beam Carrying Multiple Point MassesthahuynhcongNo ratings yet
- An Exact Solution For The Free Vibration Analysis of Timoshenko BeamsDocument6 pagesAn Exact Solution For The Free Vibration Analysis of Timoshenko BeamsSEP-PublisherNo ratings yet
- Moving Elastic BeamDocument27 pagesMoving Elastic BeamCleves AxiomaNo ratings yet
- Vibration of Beams With General Boundary Conditions Due To A Moving Harmonic LoadDocument15 pagesVibration of Beams With General Boundary Conditions Due To A Moving Harmonic LoadLuis Flavio NunesNo ratings yet
- Thin Walled StructuresDocument11 pagesThin Walled Structuresnanduslns07No ratings yet
- Development of Non-Conservative Joints in Beam Networks For Vibration Energy Flow AnalysisDocument15 pagesDevelopment of Non-Conservative Joints in Beam Networks For Vibration Energy Flow AnalysisManoel FreireNo ratings yet
- 2-67-1380635423-13. Calculating Static Deflection - FullDocument12 pages2-67-1380635423-13. Calculating Static Deflection - Fullniaz kilamNo ratings yet
- Free Flapping Vibration of Rotating Inclined Euler Beams: Chih-Ling Huang, Wen-Yi Lin, and Kuo-Mo HsiaoDocument7 pagesFree Flapping Vibration of Rotating Inclined Euler Beams: Chih-Ling Huang, Wen-Yi Lin, and Kuo-Mo HsiaoquastardNo ratings yet
- International Journal of Mechanical Sciences: Zhenguo Zhang, Feng Chen, Zhiyi Zhang, Hongxing HuaDocument13 pagesInternational Journal of Mechanical Sciences: Zhenguo Zhang, Feng Chen, Zhiyi Zhang, Hongxing HuaDrSn PadhiNo ratings yet
- Week 1 Vibration IntroductionDocument22 pagesWeek 1 Vibration IntroductionSaya SantornoNo ratings yet
- اهتزازاتDocument31 pagesاهتزازاتMoataz AlorfeNo ratings yet
- Physica E: J. Yang, L.L. Ke, S. KitipornchaiDocument9 pagesPhysica E: J. Yang, L.L. Ke, S. KitipornchaiRotNo ratings yet
- SDOF Lectures 1 To 6 For StdsDocument44 pagesSDOF Lectures 1 To 6 For StdsuchihaenomiNo ratings yet
- Nonlinear Dynamic Characteristics of A Vibro-ImpacDocument22 pagesNonlinear Dynamic Characteristics of A Vibro-ImpacpauloNo ratings yet
- Assignment 2 Module of Free Vibration Engineering 1st SEMESTER S.Y. 2016 - 2017Document14 pagesAssignment 2 Module of Free Vibration Engineering 1st SEMESTER S.Y. 2016 - 2017Narry StrummerNo ratings yet
- Basic Terminology in VibrationsDocument10 pagesBasic Terminology in VibrationsJuhi Singh100% (1)
- Mathematics 02 00172Document24 pagesMathematics 02 00172Far AwayNo ratings yet
- Vibrations Slip Test One 20 Questions With AnsDocument4 pagesVibrations Slip Test One 20 Questions With AnsDinesh DidragNo ratings yet
- NPTEL - Mechanical Engineering - Vibration ControlDocument10 pagesNPTEL - Mechanical Engineering - Vibration Control8104772799No ratings yet
- Wcee2012 2052 PDFDocument8 pagesWcee2012 2052 PDFAnasNahidhNo ratings yet
- Shi 1999Document15 pagesShi 1999Mehrshad GhasemabadiNo ratings yet
- 1 s2.0 S0022460X21005010 MainDocument12 pages1 s2.0 S0022460X21005010 MainRubén PicóNo ratings yet
- Nonlinear Vibration Solution For An Inclined Timoshenko Beam Under The Action of A Moving Force With Constant/Nonconstant VelocityDocument23 pagesNonlinear Vibration Solution For An Inclined Timoshenko Beam Under The Action of A Moving Force With Constant/Nonconstant VelocityhuhumaluNo ratings yet
- Mechanics of Machines Iii-Final Course MaterialsDocument39 pagesMechanics of Machines Iii-Final Course MaterialsKaren DavisNo ratings yet
- 3 e CG&MI2Document28 pages3 e CG&MI2George BandaNo ratings yet
- On The Eigenfrequencies of A Cantilever Beam Carrying A Tip Spring-Mass System With Mass of The Helical Spring ConsideredDocument15 pagesOn The Eigenfrequencies of A Cantilever Beam Carrying A Tip Spring-Mass System With Mass of The Helical Spring ConsideredPepe ChupinNo ratings yet
- Design of Foundations For Dynamic LoadsDocument446 pagesDesign of Foundations For Dynamic LoadsErick Alex Japay Robles75% (4)
- Archives of Civil Engineering, LX, 4, 2014 DOI: 10.2478/ace-2014-0029Document20 pagesArchives of Civil Engineering, LX, 4, 2014 DOI: 10.2478/ace-2014-0029MichelSagnoNo ratings yet
- Vibration by Finite Element MethodDocument1 pageVibration by Finite Element MethodAnonymous v9cXHdjNo ratings yet
- Vibration Analysis of A Rotating Timoshenko Beam Lin 200 000167190400006Document20 pagesVibration Analysis of A Rotating Timoshenko Beam Lin 200 000167190400006Mariela TisseraNo ratings yet
- Lecture 1623481301Document146 pagesLecture 1623481301mebratuhailu674100% (1)
- Out-Of-Plane Vibration of A Uniform Euler-Bernoulli Beam Attached To The Inside of A Rotating RimDocument19 pagesOut-Of-Plane Vibration of A Uniform Euler-Bernoulli Beam Attached To The Inside of A Rotating RimFranco VillanuevaNo ratings yet
- Hgsanche WavesDocument7 pagesHgsanche WavesSebas VargasNo ratings yet
- ICME09-AM-17: Anirban Mitra, Prasanta Sahoo and Kashinath SahaDocument6 pagesICME09-AM-17: Anirban Mitra, Prasanta Sahoo and Kashinath SahaFGHUIJNo ratings yet
- The Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary ConditionsDocument13 pagesThe Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary Conditionsngoclinhbk05No ratings yet
- Dynamic Analysis of Beams by Using The Finite Element MethodDocument6 pagesDynamic Analysis of Beams by Using The Finite Element MethodAkshay BuraNo ratings yet
- Modes of Vibration of The Beams Under The Influence of Discontinuity in FoundationDocument15 pagesModes of Vibration of The Beams Under The Influence of Discontinuity in Foundationanon_899815150No ratings yet
- A Finite Rotating Shaft Element Using Timoshenko Beam Theory PDFDocument11 pagesA Finite Rotating Shaft Element Using Timoshenko Beam Theory PDFGuilherme Henrique100% (1)
- An Improved Beam Element For Beams With Variable Axial ParametersDocument18 pagesAn Improved Beam Element For Beams With Variable Axial ParametersFaiz FebriantoNo ratings yet
- Chapter 1Document116 pagesChapter 1muhammad azwan zul-kifleyNo ratings yet
- Timoshenko Beam TheoryDocument7 pagesTimoshenko Beam TheoryAmália EirezNo ratings yet
- Trindade Wolter Sampaio 2005 JSVDocument22 pagesTrindade Wolter Sampaio 2005 JSVhlsmonteiroNo ratings yet
- Dynamic Response of Telecommunication Tower 1.2.1 Response To WindDocument6 pagesDynamic Response of Telecommunication Tower 1.2.1 Response To Windjerico habitanNo ratings yet
- Jain College of Engineering Belgaum: Analysis of Free and Forced VibrationDocument66 pagesJain College of Engineering Belgaum: Analysis of Free and Forced VibrationanilmechNo ratings yet
- Non-Linear Phenomena in Forced Vibrations of A Nearly Square Plate: Antisymmetric CaseDocument29 pagesNon-Linear Phenomena in Forced Vibrations of A Nearly Square Plate: Antisymmetric Casechirag_palan1987No ratings yet
- Basic Principles of VibrationsDocument6 pagesBasic Principles of Vibrationsdskumar49No ratings yet
- Discussion of The Improved Methods For Analyzing ADocument16 pagesDiscussion of The Improved Methods For Analyzing ASudheer Reddy TenaliNo ratings yet
- C. Ruth Le Sueuer Et Al - On The Use of Variational Wavefunctions in Calculating Vibrational Band IntensitiesDocument10 pagesC. Ruth Le Sueuer Et Al - On The Use of Variational Wavefunctions in Calculating Vibrational Band IntensitiesPassammNo ratings yet
- Vibration Analysis and Modelling of A Cantilever Beam: January 2019Document28 pagesVibration Analysis and Modelling of A Cantilever Beam: January 2019Deepak SahNo ratings yet
- Chaotic Dynamics of Repeated Impacts in Vibratory Bowl FeedersDocument13 pagesChaotic Dynamics of Repeated Impacts in Vibratory Bowl Feedersأحمد عاطف أبوغديرNo ratings yet
- Theoretical Development and Closed-Form Solution of Nonlinear Vibrations of A Directly Excited Nanotube-Reinforced Composite Cantilevered BeamDocument11 pagesTheoretical Development and Closed-Form Solution of Nonlinear Vibrations of A Directly Excited Nanotube-Reinforced Composite Cantilevered Beamteju1996coolNo ratings yet
- Business 2Document1 pageBusiness 2aliNo ratings yet
- Aya SurveyDocument11 pagesAya SurveyaliNo ratings yet
- Object Counting and Instance Segmentation With Image-Level SupervisionDocument9 pagesObject Counting and Instance Segmentation With Image-Level SupervisionaliNo ratings yet
- Sensors: A Semantic Autonomous Video Surveillance System For Dense Camera Networks in Smart CitiesDocument23 pagesSensors: A Semantic Autonomous Video Surveillance System For Dense Camera Networks in Smart CitiesaliNo ratings yet
- Bunya Pine: Araucaria BidwilliiDocument10 pagesBunya Pine: Araucaria BidwilliiLinda CarroliNo ratings yet
- Color Powder Color ChartDocument4 pagesColor Powder Color ChartArif RusyanaNo ratings yet
- Maranlig NHS Grade 11 Student's Enhanced Knowledge Skills Through Modular Learning2Document41 pagesMaranlig NHS Grade 11 Student's Enhanced Knowledge Skills Through Modular Learning2Uzziel Joy PondividaNo ratings yet
- SAP HANA StudioDocument33 pagesSAP HANA StudioPrateekVermaNo ratings yet
- Automotive Radiator Performance - Review PDFDocument3 pagesAutomotive Radiator Performance - Review PDFAnoop CadlordNo ratings yet
- Property Still Be Your Pot of GoldDocument56 pagesProperty Still Be Your Pot of GoldNon FadNo ratings yet
- Diploma in Business: Assignment BriefDocument10 pagesDiploma in Business: Assignment Brief陈肇远No ratings yet
- Fraction - Improper Fraction To Mixed FractionDocument8 pagesFraction - Improper Fraction To Mixed FractionRisaNo ratings yet
- 279 On CK. AMA! (Tips On Using UW) - Step2Document3 pages279 On CK. AMA! (Tips On Using UW) - Step2lashaNo ratings yet
- Fitel S199M24 Spec SheetDocument1 pageFitel S199M24 Spec SheetcolinyNo ratings yet
- Human Resource Information System: Presented By: Jasleen Dutta Presented To: Prof. Afreen AliDocument22 pagesHuman Resource Information System: Presented By: Jasleen Dutta Presented To: Prof. Afreen AliAmanpreet DuttaNo ratings yet
- ResMed CPAP-2012Document23 pagesResMed CPAP-2012navnaNo ratings yet
- The Perfection of The Narcissistic Self A Qualitative Study On Luxury Consumption and Customer EquityDocument7 pagesThe Perfection of The Narcissistic Self A Qualitative Study On Luxury Consumption and Customer EquityPablo Castro SalgadoNo ratings yet
- Arsenio T. Mendiola V. CaDocument7 pagesArsenio T. Mendiola V. CaCharisa BelistaNo ratings yet
- Digital NativesDocument10 pagesDigital NativesJonathan Blanco Sa RiyadhNo ratings yet
- Chess PrinciplesDocument11 pagesChess PrinciplesNick PerilNo ratings yet
- WWTP (Grit Chamber) - TDocument22 pagesWWTP (Grit Chamber) - TsarfaNo ratings yet
- Current Affairs QuizDocument3 pagesCurrent Affairs QuizJay KothariNo ratings yet
- OtooDocument11 pagesOtooStefania DavidNo ratings yet
- With Reference To MedimattersDocument3 pagesWith Reference To MedimattersGema Saltos ToalaNo ratings yet
- Preliminary Investigation On New Century Health Clinic (NCHC)Document16 pagesPreliminary Investigation On New Century Health Clinic (NCHC)Erlind GeneralaoNo ratings yet
- Lab Reproductive SDocument8 pagesLab Reproductive SJoyce TorcuatorNo ratings yet





























































































Download as pdf or txt
You might also like
- Becoming Telebirr AgentDocument147 pagesBecoming Telebirr AgentSami91% (34)
- 2018 AP Chem MOCK FRQ FROM B Score GuideDocument15 pages2018 AP Chem MOCK FRQ FROM B Score GuideLena Nikiforov100% (1)
- Design of Foundations For Dynamic LoadsDocument446 pagesDesign of Foundations For Dynamic LoadsJose Luis Velasco Cadavid100% (49)
- Test Exer 6Document3 pagesTest Exer 6Uratile PatriciaNo ratings yet
- Broomfield Hospital Site Plan: Café Shops Lifts Information PointsDocument1 pageBroomfield Hospital Site Plan: Café Shops Lifts Information Pointsady trader0% (2)
- Review of Measuring Methods and Results in Nonviscous Gas-Liquid Mass Transfer in Stirred VesselsDocument8 pagesReview of Measuring Methods and Results in Nonviscous Gas-Liquid Mass Transfer in Stirred VesselsAntonela PortaNo ratings yet
- Feasibility StudyDocument5 pagesFeasibility StudyKath Garcia50% (4)
- Resource Related Billing 01Document10 pagesResource Related Billing 01Suresh Nayak100% (2)
- Online Voting System SRSDocument7 pagesOnline Voting System SRSSanthosh KumarNo ratings yet
- Mca 15 00096 PDFDocument12 pagesMca 15 00096 PDFFarrukh RizwanNo ratings yet
- BANERJEE 2001 Journal of Sound and VibrationDocument19 pagesBANERJEE 2001 Journal of Sound and VibrationMohamed HachemiNo ratings yet
- Finite Element Analysis of Simple Rotors IITDocument33 pagesFinite Element Analysis of Simple Rotors IITjonathan mayNo ratings yet
- Beam VibrationDocument20 pagesBeam Vibrationhmsedighi459No ratings yet
- Dynamic Response of A Bernoulli-Euler Thin Beam Due To A Moving Mass Using Moving Finite ElementDocument15 pagesDynamic Response of A Bernoulli-Euler Thin Beam Due To A Moving Mass Using Moving Finite ElementIsmail EsenNo ratings yet
- Transverse Vibration of A Multiple-Timoshenko Beam System With Intermediate Elastic Connections Due To A Moving LoadDocument19 pagesTransverse Vibration of A Multiple-Timoshenko Beam System With Intermediate Elastic Connections Due To A Moving LoadgheinbaNo ratings yet
- On The Natural Frequencies and Mode Shapes of A Uniform Multi-Span Beam Carrying Multiple Point MassesDocument17 pagesOn The Natural Frequencies and Mode Shapes of A Uniform Multi-Span Beam Carrying Multiple Point MassesthahuynhcongNo ratings yet
- An Exact Solution For The Free Vibration Analysis of Timoshenko BeamsDocument6 pagesAn Exact Solution For The Free Vibration Analysis of Timoshenko BeamsSEP-PublisherNo ratings yet
- Moving Elastic BeamDocument27 pagesMoving Elastic BeamCleves AxiomaNo ratings yet
- Vibration of Beams With General Boundary Conditions Due To A Moving Harmonic LoadDocument15 pagesVibration of Beams With General Boundary Conditions Due To A Moving Harmonic LoadLuis Flavio NunesNo ratings yet
- Thin Walled StructuresDocument11 pagesThin Walled Structuresnanduslns07No ratings yet
- Development of Non-Conservative Joints in Beam Networks For Vibration Energy Flow AnalysisDocument15 pagesDevelopment of Non-Conservative Joints in Beam Networks For Vibration Energy Flow AnalysisManoel FreireNo ratings yet
- 2-67-1380635423-13. Calculating Static Deflection - FullDocument12 pages2-67-1380635423-13. Calculating Static Deflection - Fullniaz kilamNo ratings yet
- Free Flapping Vibration of Rotating Inclined Euler Beams: Chih-Ling Huang, Wen-Yi Lin, and Kuo-Mo HsiaoDocument7 pagesFree Flapping Vibration of Rotating Inclined Euler Beams: Chih-Ling Huang, Wen-Yi Lin, and Kuo-Mo HsiaoquastardNo ratings yet
- International Journal of Mechanical Sciences: Zhenguo Zhang, Feng Chen, Zhiyi Zhang, Hongxing HuaDocument13 pagesInternational Journal of Mechanical Sciences: Zhenguo Zhang, Feng Chen, Zhiyi Zhang, Hongxing HuaDrSn PadhiNo ratings yet
- Week 1 Vibration IntroductionDocument22 pagesWeek 1 Vibration IntroductionSaya SantornoNo ratings yet
- اهتزازاتDocument31 pagesاهتزازاتMoataz AlorfeNo ratings yet
- Physica E: J. Yang, L.L. Ke, S. KitipornchaiDocument9 pagesPhysica E: J. Yang, L.L. Ke, S. KitipornchaiRotNo ratings yet
- SDOF Lectures 1 To 6 For StdsDocument44 pagesSDOF Lectures 1 To 6 For StdsuchihaenomiNo ratings yet
- Nonlinear Dynamic Characteristics of A Vibro-ImpacDocument22 pagesNonlinear Dynamic Characteristics of A Vibro-ImpacpauloNo ratings yet
- Assignment 2 Module of Free Vibration Engineering 1st SEMESTER S.Y. 2016 - 2017Document14 pagesAssignment 2 Module of Free Vibration Engineering 1st SEMESTER S.Y. 2016 - 2017Narry StrummerNo ratings yet
- Basic Terminology in VibrationsDocument10 pagesBasic Terminology in VibrationsJuhi Singh100% (1)
- Mathematics 02 00172Document24 pagesMathematics 02 00172Far AwayNo ratings yet
- Vibrations Slip Test One 20 Questions With AnsDocument4 pagesVibrations Slip Test One 20 Questions With AnsDinesh DidragNo ratings yet
- NPTEL - Mechanical Engineering - Vibration ControlDocument10 pagesNPTEL - Mechanical Engineering - Vibration Control8104772799No ratings yet
- Wcee2012 2052 PDFDocument8 pagesWcee2012 2052 PDFAnasNahidhNo ratings yet
- Shi 1999Document15 pagesShi 1999Mehrshad GhasemabadiNo ratings yet
- 1 s2.0 S0022460X21005010 MainDocument12 pages1 s2.0 S0022460X21005010 MainRubén PicóNo ratings yet
- Nonlinear Vibration Solution For An Inclined Timoshenko Beam Under The Action of A Moving Force With Constant/Nonconstant VelocityDocument23 pagesNonlinear Vibration Solution For An Inclined Timoshenko Beam Under The Action of A Moving Force With Constant/Nonconstant VelocityhuhumaluNo ratings yet
- Mechanics of Machines Iii-Final Course MaterialsDocument39 pagesMechanics of Machines Iii-Final Course MaterialsKaren DavisNo ratings yet
- 3 e CG&MI2Document28 pages3 e CG&MI2George BandaNo ratings yet
- On The Eigenfrequencies of A Cantilever Beam Carrying A Tip Spring-Mass System With Mass of The Helical Spring ConsideredDocument15 pagesOn The Eigenfrequencies of A Cantilever Beam Carrying A Tip Spring-Mass System With Mass of The Helical Spring ConsideredPepe ChupinNo ratings yet
- Design of Foundations For Dynamic LoadsDocument446 pagesDesign of Foundations For Dynamic LoadsErick Alex Japay Robles75% (4)
- Archives of Civil Engineering, LX, 4, 2014 DOI: 10.2478/ace-2014-0029Document20 pagesArchives of Civil Engineering, LX, 4, 2014 DOI: 10.2478/ace-2014-0029MichelSagnoNo ratings yet
- Vibration by Finite Element MethodDocument1 pageVibration by Finite Element MethodAnonymous v9cXHdjNo ratings yet
- Vibration Analysis of A Rotating Timoshenko Beam Lin 200 000167190400006Document20 pagesVibration Analysis of A Rotating Timoshenko Beam Lin 200 000167190400006Mariela TisseraNo ratings yet
- Lecture 1623481301Document146 pagesLecture 1623481301mebratuhailu674100% (1)
- Out-Of-Plane Vibration of A Uniform Euler-Bernoulli Beam Attached To The Inside of A Rotating RimDocument19 pagesOut-Of-Plane Vibration of A Uniform Euler-Bernoulli Beam Attached To The Inside of A Rotating RimFranco VillanuevaNo ratings yet
- Hgsanche WavesDocument7 pagesHgsanche WavesSebas VargasNo ratings yet
- ICME09-AM-17: Anirban Mitra, Prasanta Sahoo and Kashinath SahaDocument6 pagesICME09-AM-17: Anirban Mitra, Prasanta Sahoo and Kashinath SahaFGHUIJNo ratings yet
- The Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary ConditionsDocument13 pagesThe Forced Vibration of A Three-Layer, Damped Sandwich Beam With Arbitrary Boundary Conditionsngoclinhbk05No ratings yet
- Dynamic Analysis of Beams by Using The Finite Element MethodDocument6 pagesDynamic Analysis of Beams by Using The Finite Element MethodAkshay BuraNo ratings yet
- Modes of Vibration of The Beams Under The Influence of Discontinuity in FoundationDocument15 pagesModes of Vibration of The Beams Under The Influence of Discontinuity in Foundationanon_899815150No ratings yet
- A Finite Rotating Shaft Element Using Timoshenko Beam Theory PDFDocument11 pagesA Finite Rotating Shaft Element Using Timoshenko Beam Theory PDFGuilherme Henrique100% (1)
- An Improved Beam Element For Beams With Variable Axial ParametersDocument18 pagesAn Improved Beam Element For Beams With Variable Axial ParametersFaiz FebriantoNo ratings yet
- Chapter 1Document116 pagesChapter 1muhammad azwan zul-kifleyNo ratings yet
- Timoshenko Beam TheoryDocument7 pagesTimoshenko Beam TheoryAmália EirezNo ratings yet
- Trindade Wolter Sampaio 2005 JSVDocument22 pagesTrindade Wolter Sampaio 2005 JSVhlsmonteiroNo ratings yet
- Dynamic Response of Telecommunication Tower 1.2.1 Response To WindDocument6 pagesDynamic Response of Telecommunication Tower 1.2.1 Response To Windjerico habitanNo ratings yet
- Jain College of Engineering Belgaum: Analysis of Free and Forced VibrationDocument66 pagesJain College of Engineering Belgaum: Analysis of Free and Forced VibrationanilmechNo ratings yet
- Non-Linear Phenomena in Forced Vibrations of A Nearly Square Plate: Antisymmetric CaseDocument29 pagesNon-Linear Phenomena in Forced Vibrations of A Nearly Square Plate: Antisymmetric Casechirag_palan1987No ratings yet
- Basic Principles of VibrationsDocument6 pagesBasic Principles of Vibrationsdskumar49No ratings yet
- Discussion of The Improved Methods For Analyzing ADocument16 pagesDiscussion of The Improved Methods For Analyzing ASudheer Reddy TenaliNo ratings yet
- C. Ruth Le Sueuer Et Al - On The Use of Variational Wavefunctions in Calculating Vibrational Band IntensitiesDocument10 pagesC. Ruth Le Sueuer Et Al - On The Use of Variational Wavefunctions in Calculating Vibrational Band IntensitiesPassammNo ratings yet
- Vibration Analysis and Modelling of A Cantilever Beam: January 2019Document28 pagesVibration Analysis and Modelling of A Cantilever Beam: January 2019Deepak SahNo ratings yet
- Chaotic Dynamics of Repeated Impacts in Vibratory Bowl FeedersDocument13 pagesChaotic Dynamics of Repeated Impacts in Vibratory Bowl Feedersأحمد عاطف أبوغديرNo ratings yet
- Theoretical Development and Closed-Form Solution of Nonlinear Vibrations of A Directly Excited Nanotube-Reinforced Composite Cantilevered BeamDocument11 pagesTheoretical Development and Closed-Form Solution of Nonlinear Vibrations of A Directly Excited Nanotube-Reinforced Composite Cantilevered Beamteju1996coolNo ratings yet
- Business 2Document1 pageBusiness 2aliNo ratings yet
- Aya SurveyDocument11 pagesAya SurveyaliNo ratings yet
- Object Counting and Instance Segmentation With Image-Level SupervisionDocument9 pagesObject Counting and Instance Segmentation With Image-Level SupervisionaliNo ratings yet
- Sensors: A Semantic Autonomous Video Surveillance System For Dense Camera Networks in Smart CitiesDocument23 pagesSensors: A Semantic Autonomous Video Surveillance System For Dense Camera Networks in Smart CitiesaliNo ratings yet
- Bunya Pine: Araucaria BidwilliiDocument10 pagesBunya Pine: Araucaria BidwilliiLinda CarroliNo ratings yet
- Color Powder Color ChartDocument4 pagesColor Powder Color ChartArif RusyanaNo ratings yet
- Maranlig NHS Grade 11 Student's Enhanced Knowledge Skills Through Modular Learning2Document41 pagesMaranlig NHS Grade 11 Student's Enhanced Knowledge Skills Through Modular Learning2Uzziel Joy PondividaNo ratings yet
- SAP HANA StudioDocument33 pagesSAP HANA StudioPrateekVermaNo ratings yet
- Automotive Radiator Performance - Review PDFDocument3 pagesAutomotive Radiator Performance - Review PDFAnoop CadlordNo ratings yet
- Property Still Be Your Pot of GoldDocument56 pagesProperty Still Be Your Pot of GoldNon FadNo ratings yet
- Diploma in Business: Assignment BriefDocument10 pagesDiploma in Business: Assignment Brief陈肇远No ratings yet
- Fraction - Improper Fraction To Mixed FractionDocument8 pagesFraction - Improper Fraction To Mixed FractionRisaNo ratings yet
- 279 On CK. AMA! (Tips On Using UW) - Step2Document3 pages279 On CK. AMA! (Tips On Using UW) - Step2lashaNo ratings yet
- Fitel S199M24 Spec SheetDocument1 pageFitel S199M24 Spec SheetcolinyNo ratings yet
- Human Resource Information System: Presented By: Jasleen Dutta Presented To: Prof. Afreen AliDocument22 pagesHuman Resource Information System: Presented By: Jasleen Dutta Presented To: Prof. Afreen AliAmanpreet DuttaNo ratings yet
- ResMed CPAP-2012Document23 pagesResMed CPAP-2012navnaNo ratings yet
- The Perfection of The Narcissistic Self A Qualitative Study On Luxury Consumption and Customer EquityDocument7 pagesThe Perfection of The Narcissistic Self A Qualitative Study On Luxury Consumption and Customer EquityPablo Castro SalgadoNo ratings yet
- Arsenio T. Mendiola V. CaDocument7 pagesArsenio T. Mendiola V. CaCharisa BelistaNo ratings yet
- Digital NativesDocument10 pagesDigital NativesJonathan Blanco Sa RiyadhNo ratings yet
- Chess PrinciplesDocument11 pagesChess PrinciplesNick PerilNo ratings yet
- WWTP (Grit Chamber) - TDocument22 pagesWWTP (Grit Chamber) - TsarfaNo ratings yet
- Current Affairs QuizDocument3 pagesCurrent Affairs QuizJay KothariNo ratings yet
- OtooDocument11 pagesOtooStefania DavidNo ratings yet
- With Reference To MedimattersDocument3 pagesWith Reference To MedimattersGema Saltos ToalaNo ratings yet
- Preliminary Investigation On New Century Health Clinic (NCHC)Document16 pagesPreliminary Investigation On New Century Health Clinic (NCHC)Erlind GeneralaoNo ratings yet
- Lab Reproductive SDocument8 pagesLab Reproductive SJoyce TorcuatorNo ratings yet