Download as pdf or txt
You might also like
- CMSC 312 Project 2Document9 pagesCMSC 312 Project 2eswarsai saiNo ratings yet
- Social Media Marketing in IndiaDocument23 pagesSocial Media Marketing in IndiaYash MandaliaNo ratings yet
- The Comparison of CPU Time Consumption For PDFDocument4 pagesThe Comparison of CPU Time Consumption For PDFGeison QuevedoNo ratings yet
- Python For SeismologyDocument4 pagesPython For SeismologyKanita Nur IzzatiNo ratings yet
- Trajectory Optimization For Autonomous Flying Base Station Via Reinforcement LearningDocument5 pagesTrajectory Optimization For Autonomous Flying Base Station Via Reinforcement LearningAbhishek GuptaNo ratings yet
- MMSP SubmittedDocument7 pagesMMSP SubmittedShopnil SarkarNo ratings yet
- Politecnico Di Torino Repository ISTITUZIONALE: Loop Detection in Robotic Navigation Using MPEG CDVSDocument7 pagesPolitecnico Di Torino Repository ISTITUZIONALE: Loop Detection in Robotic Navigation Using MPEG CDVSPepe MNo ratings yet
- Spike-Based Convolutional Network For Real-Time Processing: AUGUST 2010Document5 pagesSpike-Based Convolutional Network For Real-Time Processing: AUGUST 2010iyxw2l4No ratings yet
- Object Tracking Using High Resolution Satellite ImageryDocument15 pagesObject Tracking Using High Resolution Satellite ImageryashalizajohnNo ratings yet
- Politecnico Di Torino Repository ISTITUZIONALE: Loop Detection in Robotic Navigation Using MPEG CDVSDocument7 pagesPolitecnico Di Torino Repository ISTITUZIONALE: Loop Detection in Robotic Navigation Using MPEG CDVSraisin netsNo ratings yet
- Spike-Based Convolutional Network For Real-Time ProcessingDocument4 pagesSpike-Based Convolutional Network For Real-Time Processingiyxw2l4No ratings yet
- Longterm Tracking With Online SearchingDocument7 pagesLongterm Tracking With Online SearchingQuang Minh BùiNo ratings yet
- The Distributed Computing Column: C Onvergent and Commutative Replicated D Ata TypesDocument22 pagesThe Distributed Computing Column: C Onvergent and Commutative Replicated D Ata Typesjuanperezrodriguez958No ratings yet
- INF5090 NS 3 Tutorial 2011 Oslo SlidesDocument48 pagesINF5090 NS 3 Tutorial 2011 Oslo SlidesWondale KebedeNo ratings yet
- 3D Localization, Mapping and Path Planning For Search and Rescue OperationsDocument3 pages3D Localization, Mapping and Path Planning For Search and Rescue OperationsbookeepaNo ratings yet
- Psvwave Submission 2Document2 pagesPsvwave Submission 2Muhammad HidayatullahNo ratings yet
- Module 4.1 - Memory and Data Locality: GPU Teaching KitDocument132 pagesModule 4.1 - Memory and Data Locality: GPU Teaching KitAndy OrtizNo ratings yet
- Crazyswarm PDFDocument6 pagesCrazyswarm PDFOvunc TuzelNo ratings yet
- Flickr SolutionDocument8 pagesFlickr SolutionramNo ratings yet
- HeapsDocument67 pagesHeapsPaul CockshottNo ratings yet
- RlofDocument6 pagesRlofYna ForondaNo ratings yet
- Computers and Mathematics With ApplicationsDocument10 pagesComputers and Mathematics With Applicationsalireza khoshnoodNo ratings yet
- CNN and AutoencoderDocument56 pagesCNN and AutoencoderShubham BhaleraoNo ratings yet
- Timothy Lee, Multiple Sensor Indoor Mapping Using A Mobile Robot - 2Document5 pagesTimothy Lee, Multiple Sensor Indoor Mapping Using A Mobile Robot - 2Gires TakamNo ratings yet
- ITCE 720A Autonomic Wireless Networking (Fall, 2009)Document24 pagesITCE 720A Autonomic Wireless Networking (Fall, 2009)Souhila SelmaNo ratings yet
- ICP-based Pose-Graph SLAM: Ellon Mendes, Pierrick Koch, Simon LacroixDocument7 pagesICP-based Pose-Graph SLAM: Ellon Mendes, Pierrick Koch, Simon LacroixmhahmadNo ratings yet
- Experiment No. 8: 1. Aim: Develop A Simple Wireless Adhoc Network Using Aodv, Aomdv & Tora. AlsoDocument3 pagesExperiment No. 8: 1. Aim: Develop A Simple Wireless Adhoc Network Using Aodv, Aomdv & Tora. AlsoAnil kadamNo ratings yet
- 1890-Article Text-9703-1-10-20210505Document7 pages1890-Article Text-9703-1-10-20210505محمد مطيعNo ratings yet
- ImplementationofslamDocument7 pagesImplementationofslamRudranil BoseNo ratings yet
- Solution Cs09 Week 07 Assignment 07Document3 pagesSolution Cs09 Week 07 Assignment 07blackheartsm7No ratings yet
- NVR 2008 004Document32 pagesNVR 2008 004Dapeng ZhangNo ratings yet
- Forth As The Basis For An Integrated Operations Environment For A Space Shuttle Scientific ExperimentDocument14 pagesForth As The Basis For An Integrated Operations Environment For A Space Shuttle Scientific ExperimentJoet Sospeter MuwangaNo ratings yet
- Simlod: Simultaneous Lod Generation and RenderingDocument12 pagesSimlod: Simultaneous Lod Generation and RenderingcleanerhokNo ratings yet
- Dcn-Lab FileDocument41 pagesDcn-Lab FileKartikey RanaNo ratings yet
- 9Document25 pages9Rishab ChoubeyNo ratings yet
- FPGA Implementation of CORDIC-Based QRD-RLS AlgorithmDocument5 pagesFPGA Implementation of CORDIC-Based QRD-RLS Algorithmsappal73asNo ratings yet
- Logical Topology Design Using Efficient Heuristics in Wavelength Routed NetworksDocument15 pagesLogical Topology Design Using Efficient Heuristics in Wavelength Routed NetworksiisteNo ratings yet
- An Effective Chaos-Based Image Watermarking Scheme Using Fractal CodingDocument7 pagesAn Effective Chaos-Based Image Watermarking Scheme Using Fractal CodingsusuelaNo ratings yet
- Control Flow and Synchronisation: Prof Wes Armour Wes - Armour@eng - Ox.ac - UkDocument48 pagesControl Flow and Synchronisation: Prof Wes Armour Wes - Armour@eng - Ox.ac - UkDenisNo ratings yet
- Multilateration Localization in The Presence of Anchor Location UncertaintiesDocument6 pagesMultilateration Localization in The Presence of Anchor Location UncertaintiesMohammed Siyad BNo ratings yet
- Automatic Generation of 3D Polygon Maps For Mobile RobotsDocument5 pagesAutomatic Generation of 3D Polygon Maps For Mobile Robotsjesus_larrazabal_salasNo ratings yet
- Labwork 2 Logging Attribute and TracingDocument11 pagesLabwork 2 Logging Attribute and TracingĐào Tuyết NgânNo ratings yet
- Learning Hierarchical Features For Scene LabelingDocument15 pagesLearning Hierarchical Features For Scene LabelingkiltzNo ratings yet
- Cassandra Availability VirtualDocument23 pagesCassandra Availability VirtualRaghavendar PNo ratings yet
- Network Coding-Based ARQ Scheme With Overlapping Selection For Resource Limited Multicast/Broadcast ServicesDocument6 pagesNetwork Coding-Based ARQ Scheme With Overlapping Selection For Resource Limited Multicast/Broadcast ServicesDhan Raj BandiNo ratings yet
- CN LAB Programs Part-ADocument24 pagesCN LAB Programs Part-AbhavithathummalaNo ratings yet
- OpenAirInterfaceTraining 072011Document123 pagesOpenAirInterfaceTraining 072011niyassaitNo ratings yet
- Traffic Sign Detection Using Convolutional Neural Network: TitleDocument15 pagesTraffic Sign Detection Using Convolutional Neural Network: TitlePranav TandonNo ratings yet
- CUDA Memories: GPU Teaching KitDocument36 pagesCUDA Memories: GPU Teaching KitAndy OrtizNo ratings yet
- Customized Posit Adders and Multipliers Using The Flopoco Core GeneratorDocument5 pagesCustomized Posit Adders and Multipliers Using The Flopoco Core Generatorisha chaubeyNo ratings yet
- SLamDocument10 pagesSLamNguyen TranNo ratings yet
- Lab Python Numpy OpencvDocument45 pagesLab Python Numpy OpencvClaudia OspinaNo ratings yet
- Markovian Implementation Methods Using Mobile Ad Hoc NetworksDocument7 pagesMarkovian Implementation Methods Using Mobile Ad Hoc NetworksIJRASETPublicationsNo ratings yet
- Vision Meets RoboticsDocument7 pagesVision Meets RoboticsRupali GNo ratings yet
- Asymmetric Distances For Binary Embeddings: Albert Gordo, Florent Perronnin, Yunchao Gong, Svetlana LazebnikDocument15 pagesAsymmetric Distances For Binary Embeddings: Albert Gordo, Florent Perronnin, Yunchao Gong, Svetlana LazebnikMarcos VirgensNo ratings yet
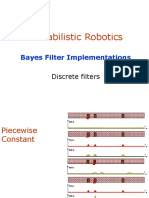
- Probabilistic Robotics: Bayes Filter ImplementationsDocument11 pagesProbabilistic Robotics: Bayes Filter ImplementationsRogers SureNo ratings yet
- Node Clustering Technology For Enhancement The Quality of Service of Wireless NetworkDocument13 pagesNode Clustering Technology For Enhancement The Quality of Service of Wireless Networkindex PubNo ratings yet
- Simultaneous Localization and Mapping of Mobile Robot With Research and ImplementationDocument4 pagesSimultaneous Localization and Mapping of Mobile Robot With Research and ImplementationAhmad KhanNo ratings yet
- Use Nko 17 Re PlanningDocument8 pagesUse Nko 17 Re Planningageoir goeNo ratings yet
- Node Clustering Technology For Enhancement The Quality of Service of Wireless NetworkDocument13 pagesNode Clustering Technology For Enhancement The Quality of Service of Wireless Networkindex PubNo ratings yet
- Oscar Tgreport 02Document25 pagesOscar Tgreport 02Ryan Hua ZhangNo ratings yet
- Voxel: Exploring the Depths of Computer Vision with Voxel TechnologyFrom EverandVoxel: Exploring the Depths of Computer Vision with Voxel TechnologyNo ratings yet
- PDB Ebooks: Free Ebook Sample of "Digital Logic Design MCQS: Multiple Choice Questions and Answers (Quiz & Tests With Answer Keys) " by Arshad IqbalDocument15 pagesPDB Ebooks: Free Ebook Sample of "Digital Logic Design MCQS: Multiple Choice Questions and Answers (Quiz & Tests With Answer Keys) " by Arshad Iqbalrahul kNo ratings yet
- RE FX TablesDocument2 pagesRE FX TablesJovana ZugicNo ratings yet
- FileMaker Dropbox Integration - DB ServicesDocument10 pagesFileMaker Dropbox Integration - DB ServicesDB ServicesNo ratings yet
- 1 - PPT Module (20 Files Merged)Document714 pages1 - PPT Module (20 Files Merged)harshNo ratings yet
- Nature of Computer AuditDocument39 pagesNature of Computer AuditKryss Clyde Tabligan0% (1)
- AP Supplier Conversion Using Bulk CollectDocument7 pagesAP Supplier Conversion Using Bulk CollectanuNo ratings yet
- AlienVault Server PDFDocument3 pagesAlienVault Server PDFfawas hamdiNo ratings yet
- Brochure UPS - Supreme - 10KVADocument8 pagesBrochure UPS - Supreme - 10KVAMikailNo ratings yet
- Installation Manual MSDAC DACF-730P V2.6Document128 pagesInstallation Manual MSDAC DACF-730P V2.6Jeet DattaNo ratings yet
- Software Engineer Test Online Mcqs - Solve Mcqs OnlineDocument7 pagesSoftware Engineer Test Online Mcqs - Solve Mcqs OnlineImtiaz ZamanNo ratings yet
- A New Object-Oriented Programming Language: SH: Jeffrey S. Haemer Canary Software, IncDocument13 pagesA New Object-Oriented Programming Language: SH: Jeffrey S. Haemer Canary Software, Incioj5076No ratings yet
- DESCARGAR El Mejor SCRIPT para DOORS ? AUTOFARM SUPER OP Funcionando INDETECTABLE ROBLOX 2022?Document9 pagesDESCARGAR El Mejor SCRIPT para DOORS ? AUTOFARM SUPER OP Funcionando INDETECTABLE ROBLOX 2022?Johan felipe Moreno arellanoNo ratings yet
- Cylinder: (Nx8-Help) Design Feature 1Document7 pagesCylinder: (Nx8-Help) Design Feature 1Yashwanth Raj100% (1)
- Main Operations Manual: FS2Crew: Wilco Feelthere Airbus Special EditionDocument43 pagesMain Operations Manual: FS2Crew: Wilco Feelthere Airbus Special EditionÓscarEmanuelVilhenaGonçalvesNo ratings yet
- T17 Computerized Passenger Reservation System (PRS) : Chapter - 10Document10 pagesT17 Computerized Passenger Reservation System (PRS) : Chapter - 10lvsaruNo ratings yet
- Excel Assignment #D: Software IntegrationDocument3 pagesExcel Assignment #D: Software IntegrationdivyeshNo ratings yet
- Software Input Output Reference - Maintenance Avaya Communication Server 1000 (NN43001-711 - 05.05)Document688 pagesSoftware Input Output Reference - Maintenance Avaya Communication Server 1000 (NN43001-711 - 05.05)bobfuestNo ratings yet
- OO Design PatternsDocument49 pagesOO Design PatternsRavi RoopnarineNo ratings yet
- Mipower Ver 10 01Document4 pagesMipower Ver 10 01Nokhwrang BrahmaNo ratings yet
- Delhi Technological University (Formerly Delhi College of Engineering) Shahbad Daulatpur, Bawana Road, Delhi 110042Document17 pagesDelhi Technological University (Formerly Delhi College of Engineering) Shahbad Daulatpur, Bawana Road, Delhi 110042Satyam singhalNo ratings yet
- Export To Epub: Use Paragraph Styles in Pages To Create Stunning Digital BooksDocument4 pagesExport To Epub: Use Paragraph Styles in Pages To Create Stunning Digital BooksKholipah olipNo ratings yet
- Paper 2. Bitcoin and Beyond - A Technical Survey On Decentralized Digital CurrenciesDocument40 pagesPaper 2. Bitcoin and Beyond - A Technical Survey On Decentralized Digital CurrenciesQubits 01No ratings yet
- Step Motor Controller (Done)Document8 pagesStep Motor Controller (Done)Chatree PornchanyaNo ratings yet
- 1MA170 0eDocument23 pages1MA170 0enirmalk_87No ratings yet
- Soc Term Paper 146Document5 pagesSoc Term Paper 146Jwc Fest2018No ratings yet
- How To Start Home Based Jobs Without Investment or Registration Fees? "Genuine Home Based Work From Home Jobs"Document1 pageHow To Start Home Based Jobs Without Investment or Registration Fees? "Genuine Home Based Work From Home Jobs"ali bin sefuNo ratings yet
- It206 Feb2020Document3 pagesIt206 Feb2020Tinashe MurambiwaNo ratings yet
- CCENT Lab 1 1 Performing Switch Initial Startup v1.0.1Document32 pagesCCENT Lab 1 1 Performing Switch Initial Startup v1.0.1Bijay LamaNo ratings yet