Download as doc, pdf, or txt
You might also like
- Lab 5 Forces in Crane JibDocument20 pagesLab 5 Forces in Crane JibFgj JhgNo ratings yet
- Chemestry Project FileDocument17 pagesChemestry Project Fileprisha thapar74% (19)
- Structures Method of SectionDocument16 pagesStructures Method of SectionAL RIZWANNo ratings yet
- 2013 Mechanics FR Only No Equations SheetDocument16 pages2013 Mechanics FR Only No Equations SheetAmosqu LolNo ratings yet
- Assignments /tutorial Sheets: ME - 102: Engineering MechanicsDocument12 pagesAssignments /tutorial Sheets: ME - 102: Engineering MechanicssubhashNo ratings yet
- Engg. Mechanics Assignment (Equilibrium)Document4 pagesEngg. Mechanics Assignment (Equilibrium)subhash100% (1)
- Assignment#3 (TRUSS)Document4 pagesAssignment#3 (TRUSS)subhashNo ratings yet
- Equations of Equilibrium in 2-D: Today's ObjectivesDocument16 pagesEquations of Equilibrium in 2-D: Today's ObjectivesbesshoNo ratings yet
- Shear Force and Bending Moment - 1Document10 pagesShear Force and Bending Moment - 1Naveen UndrallaNo ratings yet
- CH#5 - Equilibrium of A Rigid BodyDocument17 pagesCH#5 - Equilibrium of A Rigid BodyPaulJob TamNo ratings yet
- CH 5Document41 pagesCH 5prince1004No ratings yet
- CH 5Document41 pagesCH 5என் கருத்துNo ratings yet
- Truss Lecture6xDocument28 pagesTruss Lecture6xJoe JoeNo ratings yet
- 3rd UnitDocument76 pages3rd UnitP2109 Praphul HampapuramNo ratings yet
- Chapter 5Document49 pagesChapter 5ISRAEL HAILUNo ratings yet
- Free Body DiagramDocument5 pagesFree Body DiagramAbrar Fahim SayeefNo ratings yet
- Analysis of Trusses: Vector Mechanics For Engineers: StaticsDocument31 pagesAnalysis of Trusses: Vector Mechanics For Engineers: StaticsAlex CarrilloNo ratings yet
- Capitulo 5 - Flexion en Vigas PDFDocument63 pagesCapitulo 5 - Flexion en Vigas PDFCristian David BravoNo ratings yet
- Axial Load LectureDocument21 pagesAxial Load LectureKajal PatelNo ratings yet
- Lecture 5 - Slope Deflection Method For Beams PDFDocument66 pagesLecture 5 - Slope Deflection Method For Beams PDFzakheusNo ratings yet
- Week 3 - Equilibrium+FBDDocument68 pagesWeek 3 - Equilibrium+FBDiwhy_No ratings yet
- ENG 2016 (Module 3)Document34 pagesENG 2016 (Module 3)reamarie730No ratings yet
- 4th SamplExDocument3 pages4th SamplExhannah30No ratings yet
- Statics Notes 4 For StudentsDocument24 pagesStatics Notes 4 For Students왕흠일No ratings yet
- 9 Structural Analysis - Frames and Machines - Part BDocument22 pages9 Structural Analysis - Frames and Machines - Part BManikanta SutapalliNo ratings yet
- X - A) 3 M C) 6 MDocument58 pagesX - A) 3 M C) 6 MAabid hassanNo ratings yet
- 7-Rigid Body Equilibrium - PartaDocument65 pages7-Rigid Body Equilibrium - Partabilo1984No ratings yet
- Analysis of TrussDocument6 pagesAnalysis of TrussAbhisekh SahaNo ratings yet
- EGM251 - Past PaperDocument4 pagesEGM251 - Past Paperkalahanmoonga82No ratings yet
- Engineering MechanicsDocument80 pagesEngineering MechanicsVv4H100% (1)
- Internal ForcesDocument12 pagesInternal ForcesMandrata LimdrawanNo ratings yet
- Fundamental Principles of Mechanics: ME231: Solid Mechanics-IDocument8 pagesFundamental Principles of Mechanics: ME231: Solid Mechanics-IRohan sharmaNo ratings yet
- StaticsC05 - Equilibrium of A Rigid BodyDocument13 pagesStaticsC05 - Equilibrium of A Rigid BodyAbdelkader MabroukNo ratings yet
- KME402Document8 pagesKME402Durgesh DhoreNo ratings yet
- Module 5: Force Method - Introduction and Applications Lecture 1: Analysis of Statically Indeterminate BeamsDocument11 pagesModule 5: Force Method - Introduction and Applications Lecture 1: Analysis of Statically Indeterminate BeamsVishal RastogiNo ratings yet
- Lec 29 PDFDocument11 pagesLec 29 PDFMohitNo ratings yet
- Section MethodDocument15 pagesSection MethodAbdul WahabNo ratings yet
- Engineering MechanicsDocument23 pagesEngineering Mechanicsdnmrk glngNo ratings yet
- Translated Exam 7NOV2012Document3 pagesTranslated Exam 7NOV2012Hriday GovindNo ratings yet
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, Madras Module No. # 1.3 Lecture No. # 03 Review of Basic Structural Analysis - 1Document32 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, Madras Module No. # 1.3 Lecture No. # 03 Review of Basic Structural Analysis - 1MananshNo ratings yet
- Topic3 - Displacement Method of Analysis BeamsDocument23 pagesTopic3 - Displacement Method of Analysis BeamsMary Joanne Capacio AniñonNo ratings yet
- Chapter 5 - PDFDocument47 pagesChapter 5 - PDFFiras Abu taleb100% (1)
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument35 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasParmeshwar KushwahaNo ratings yet
- Chapter 4.a (Simple Truses)Document24 pagesChapter 4.a (Simple Truses)LogarithemNo ratings yet
- Structural AnalysisDocument21 pagesStructural AnalysisSylvester WasongaNo ratings yet
- Lecture Notes SOM401-2009 01Document4 pagesLecture Notes SOM401-2009 01mystyfyme79No ratings yet
- GEG 113 SlidesDocument47 pagesGEG 113 SlidesOlajuwonNo ratings yet
- ENGR-1100 Introduction To Engineering AnalysisDocument28 pagesENGR-1100 Introduction To Engineering AnalysisHAFIZNo ratings yet
- Equilibrium of A Rigid Body & Free-Body Diagrams: Today's ObjectivesDocument54 pagesEquilibrium of A Rigid Body & Free-Body Diagrams: Today's ObjectiveshaloNo ratings yet
- Slope Deflection MethodDocument8 pagesSlope Deflection Methodpankaj_97No ratings yet
- CE201 Statics Chap5Document26 pagesCE201 Statics Chap5zeromeansNo ratings yet
- 2-Lectures LEC 02 Load and Stress AnalysisDocument10 pages2-Lectures LEC 02 Load and Stress AnalysisNagaraj RamachandrappaNo ratings yet
- Statics - TAM 210 & TAM 211: February 14, 2018Document17 pagesStatics - TAM 210 & TAM 211: February 14, 2018renz pepaNo ratings yet
- Trusses Methods of JointsDocument17 pagesTrusses Methods of JointsTanda SeruNo ratings yet
- S Kuliah03-Equilibriuminaplane2d 3Document27 pagesS Kuliah03-Equilibriuminaplane2d 3MD MotoVlogNo ratings yet
- Trusses - Methods of Joints: Today's Objectives: In-Class ActivitiesDocument17 pagesTrusses - Methods of Joints: Today's Objectives: In-Class ActivitiesDerek SegalumaNo ratings yet
- Worked Example SDDocument79 pagesWorked Example SDtizazuNo ratings yet
- Hyperbolic Functions: with Configuration Theorems and Equivalent and Equidecomposable FiguresFrom EverandHyperbolic Functions: with Configuration Theorems and Equivalent and Equidecomposable FiguresNo ratings yet
- Standard-Slope Integration: A New Approach to Numerical IntegrationFrom EverandStandard-Slope Integration: A New Approach to Numerical IntegrationNo ratings yet
- Properties of Air SiDocument4 pagesProperties of Air Siiklln6No ratings yet
- Topic: Paddle Type Agitator: Guided By: Prof .Jigna S.PatelDocument15 pagesTopic: Paddle Type Agitator: Guided By: Prof .Jigna S.PatelenriqueNo ratings yet
- CrystallizersDocument5 pagesCrystallizersSharissePapasNo ratings yet
- ATD RAnkin Assignment-2011Document3 pagesATD RAnkin Assignment-2011Mradul Yadav0% (2)
- Lec 18Document6 pagesLec 18Anonymous rn2qoBPjKyNo ratings yet
- Micromorphic ElectronicDocument16 pagesMicromorphic ElectronicGraceNo ratings yet
- Plastic HingeDocument12 pagesPlastic HingeJakov OrebNo ratings yet
- Physics I Equation SheetDocument1 pagePhysics I Equation SheetJerhiel Rolando P. Alberto Jr. IINo ratings yet
- CHAPTER 1 FluidsDocument24 pagesCHAPTER 1 FluidsIvan JadeNo ratings yet
- 2019 08 21 - Program) OptilasDocument90 pages2019 08 21 - Program) OptilasIvan MontesNo ratings yet
- Gas Laws Short Tricks & Advanced TheoryDocument11 pagesGas Laws Short Tricks & Advanced TheoryRutesh JavalkarNo ratings yet
- Cinetica Oxido de Etileno y AguaDocument16 pagesCinetica Oxido de Etileno y AguaJuan Felipe Cortes FernandezNo ratings yet
- Reservoir Engineering I: Barham S. Mahmood E-Mail: Petroleum Engineering DepartmentDocument33 pagesReservoir Engineering I: Barham S. Mahmood E-Mail: Petroleum Engineering DepartmentAbdulla MohammadNo ratings yet
- Function 6Document25 pagesFunction 6Akhil MathewNo ratings yet
- Comparison: 5.1 Comparison With Previous ModelDocument4 pagesComparison: 5.1 Comparison With Previous ModelPrianurraufikachmadNo ratings yet
- Sensors: Carbon-Based Nanomaterials in Biomass-Based Fuel-Fed Fuel CellsDocument21 pagesSensors: Carbon-Based Nanomaterials in Biomass-Based Fuel-Fed Fuel CellsMyhome 24No ratings yet
- Stress Check and Casing SeatDocument19 pagesStress Check and Casing Seatمحمد كريم زهير حبيب 49100% (1)
- 28-03-2021 - JR - Super60 - Jee-Adv (2018-P1) - WTA-29 - Key - Sol - SDocument11 pages28-03-2021 - JR - Super60 - Jee-Adv (2018-P1) - WTA-29 - Key - Sol - SIITIANNo ratings yet
- 1.1 Engineering ChemistryDocument5 pages1.1 Engineering Chemistryhgiri2007No ratings yet
- Hydraulics10 Neric10Document12 pagesHydraulics10 Neric10jrmmansayonNo ratings yet
- 1.what Is The Importance of GIT in Current Development Scenario of Nepal? Discuss Some of The Potential Application of GIT?Document5 pages1.what Is The Importance of GIT in Current Development Scenario of Nepal? Discuss Some of The Potential Application of GIT?aayushNo ratings yet
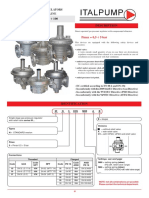
- Ir 3 5 DN 32 100Document9 pagesIr 3 5 DN 32 100henddikNo ratings yet
- Inelastic Material BehaviorDocument17 pagesInelastic Material BehaviorJONATHAN RAJ A/L SEMANNo ratings yet
- Compressive Strength Is The Capacity of A Material or Structure ToDocument5 pagesCompressive Strength Is The Capacity of A Material or Structure ToMarie Fe BermidoNo ratings yet
- Sylvania Guide To Energy Saving Lamps Brochure 1986Document12 pagesSylvania Guide To Energy Saving Lamps Brochure 1986Alan Masters100% (1)
- Unit 2 PDFDocument4 pagesUnit 2 PDFabhiazad100% (1)
- M1 ModellingDocument12 pagesM1 Modellingozgurbarisaydin2No ratings yet
- ME 265 Lecture Slides 1b (Introduction)Document27 pagesME 265 Lecture Slides 1b (Introduction)Leslie Owusu MensahNo ratings yet
- GATE 200 Days ScheduleDocument8 pagesGATE 200 Days ScheduleTejas KalvankarNo ratings yet