Download as pdf or txt
You might also like
- Tutorial - Chapter 1: Basic Concepts: Wednesday 05/02/2020 Venue: K303Document2 pagesTutorial - Chapter 1: Basic Concepts: Wednesday 05/02/2020 Venue: K303YemukelaniNo ratings yet
- Yellow Fever East Asian Fetish Among Anime Fans OtakusDocument30 pagesYellow Fever East Asian Fetish Among Anime Fans OtakusTazin Khan PromiNo ratings yet
- V&N 354 - LectureLesing1Document4 pagesV&N 354 - LectureLesing1YemukelaniNo ratings yet
- V&N 354 LectureLesing6Document7 pagesV&N 354 LectureLesing6YemukelaniNo ratings yet
- V&N 354 LectureLesing5Document7 pagesV&N 354 LectureLesing5YemukelaniNo ratings yet
- MATH 057 Fourier: Johnson Liu 24 February 2019Document5 pagesMATH 057 Fourier: Johnson Liu 24 February 2019Johnson LiuNo ratings yet
- ELEN3012 - 2020 Part 2Document7 pagesELEN3012 - 2020 Part 2Bongani MofokengNo ratings yet
- Solution QFT 1Document13 pagesSolution QFT 1Sara AvizNo ratings yet
- AERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumDocument5 pagesAERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumMD GOLAM SARWARNo ratings yet
- Exercise 6: TT 2 XX TDocument6 pagesExercise 6: TT 2 XX TMONA KUMARINo ratings yet
- Lecture 8Document23 pagesLecture 8Jarom SaavedraNo ratings yet
- Fourier Series and Simple Applications: Rahul SinghDocument7 pagesFourier Series and Simple Applications: Rahul SinghRahul Yogendra SinghNo ratings yet
- Midterm Review PDFDocument16 pagesMidterm Review PDFMt RushNo ratings yet
- Sol 6Document5 pagesSol 6Luis ZambranoNo ratings yet
- Phys 130 Formula Sheet V2Document2 pagesPhys 130 Formula Sheet V2rwopara2007No ratings yet
- Logarithmic DecrementDocument7 pagesLogarithmic DecrementammarNo ratings yet
- 63ufrep 13.EC FullSyllabusPaper-II (Solutions)Document42 pages63ufrep 13.EC FullSyllabusPaper-II (Solutions)Saty Prakash YadavNo ratings yet
- 4 Legendre Functions: 4.1 Series SolutionDocument12 pages4 Legendre Functions: 4.1 Series SolutionRoy VeseyNo ratings yet
- Lecture # 23: Subject No. PH11003 (Physics of Waves) Duration: 2 HRDocument14 pagesLecture # 23: Subject No. PH11003 (Physics of Waves) Duration: 2 HRdomagix470No ratings yet
- Heaton SDOF ch1 PDFDocument14 pagesHeaton SDOF ch1 PDFDevit DepeNo ratings yet
- Modal Decomp Non Uni StratDocument6 pagesModal Decomp Non Uni StratAnuj NigamNo ratings yet
- Lecture19 Two Independents Variables 2Document14 pagesLecture19 Two Independents Variables 2shubhamNo ratings yet
- RF Design Lecture NotesDocument79 pagesRF Design Lecture NotesrachnaNo ratings yet
- ECE438 - Laboratory 7a: Digital Filter Design (Week 1) : N 1 I M KDocument11 pagesECE438 - Laboratory 7a: Digital Filter Design (Week 1) : N 1 I M Klakssububbu91No ratings yet
- Lecture 1003Document4 pagesLecture 1003YocobSamandrewsNo ratings yet
- Zuber CFT LecturesDocument36 pagesZuber CFT LecturesguilleasilvaNo ratings yet
- Dynamic Response of Second Order Mechanical Systems: Handout #2a (Pp. 1-39)Document39 pagesDynamic Response of Second Order Mechanical Systems: Handout #2a (Pp. 1-39)Oliver KrausNo ratings yet
- HW 6 SolutionsDocument3 pagesHW 6 SolutionsAntonioNo ratings yet
- Quantum Field Theory: Example Sheet 1: 1. Decoupled Harmonic OscillatorDocument5 pagesQuantum Field Theory: Example Sheet 1: 1. Decoupled Harmonic OscillatorUday SoodNo ratings yet
- MIT8 03SCF16 PracticeFinalExam1 Solutions 3Document18 pagesMIT8 03SCF16 PracticeFinalExam1 Solutions 3Kevin Erique Solano JaramilloNo ratings yet
- Lecture - 36: Wave Propagation in Continuum SystemDocument4 pagesLecture - 36: Wave Propagation in Continuum SystemgauthamNo ratings yet
- 2016 Exam 3 SolutionDocument6 pages2016 Exam 3 Solution김명주No ratings yet
- Parabolic Equations: 9.1 One - Dimensional Unsteady Diffusion With Homogenous Boundary ConditionsDocument9 pagesParabolic Equations: 9.1 One - Dimensional Unsteady Diffusion With Homogenous Boundary Conditionsrohit singhNo ratings yet
- TelegrphDocument4 pagesTelegrphimohammadghiyasiNo ratings yet
- Test 1 - Vibration Chapter 1 2 (JUl2021)Document2 pagesTest 1 - Vibration Chapter 1 2 (JUl2021)Nazirah AzraNo ratings yet
- Problem Sheet On Green's FunctionsDocument3 pagesProblem Sheet On Green's FunctionsGiorgio LiNo ratings yet
- ELEN3012 - 2020 Part 1Document6 pagesELEN3012 - 2020 Part 1Bongani MofokengNo ratings yet
- HW1 SolutionDocument3 pagesHW1 SolutionZim ShahNo ratings yet
- Simple Harmonic Motion: 8.01 Week 12D1Document23 pagesSimple Harmonic Motion: 8.01 Week 12D1Deepak AwasthiNo ratings yet
- Parte 6Document7 pagesParte 6Elohim Ortiz CaballeroNo ratings yet
- M340project Sacco MaddenDocument6 pagesM340project Sacco MaddenDavid SaccoNo ratings yet
- 1 Example 2: Heat EquationDocument4 pages1 Example 2: Heat EquationsalmanNo ratings yet
- DSP MidtermDocument4 pagesDSP MidtermRen Aldrin BobadillaNo ratings yet
- Formulary Systeemanalyse (H00S4A) Systems Theory (H04X3B) : J. Swevers November 2016Document11 pagesFormulary Systeemanalyse (H00S4A) Systems Theory (H04X3B) : J. Swevers November 2016Bader AlShakhatrahNo ratings yet
- c1) 1DOF - Forced VibDocument50 pagesc1) 1DOF - Forced VibchocsoftwareNo ratings yet
- Frequency Response Analysis: Karl D. Hammond January 2008Document14 pagesFrequency Response Analysis: Karl D. Hammond January 2008Trixie NuylesNo ratings yet
- Manometer Lab ReportwithrefDocument12 pagesManometer Lab ReportwithrefCH20B020 SHUBHAM BAPU SHELKENo ratings yet
- Chapter 9:: Frequency Domain Analysis of Dynamic SystemsDocument11 pagesChapter 9:: Frequency Domain Analysis of Dynamic SystemsinnoodiraNo ratings yet
- Atom LightDocument23 pagesAtom LightGharib MahmoudNo ratings yet
- 05 D Z DomainDocument63 pages05 D Z Domainquanmh16082003No ratings yet
- Vibrations: and Their Design Requires Consideration To Oscillatory BehaviorDocument25 pagesVibrations: and Their Design Requires Consideration To Oscillatory BehaviorManashaaNo ratings yet
- CF NotesDocument7 pagesCF NotesHồ Nghĩa PhươngNo ratings yet
- Review of Sdof Concepts: CEE490bDocument7 pagesReview of Sdof Concepts: CEE490bpedro sNo ratings yet
- Hamiltonian Mechanics Unter Besonderer Ber Ucksichtigung Der H Oheren LehranstaltenDocument6 pagesHamiltonian Mechanics Unter Besonderer Ber Ucksichtigung Der H Oheren LehranstaltenvelayyaNo ratings yet
- 1 Notes On Brownian Motion: 1.1 Normal DistributionDocument15 pages1 Notes On Brownian Motion: 1.1 Normal DistributionnormanNo ratings yet
- Assignment 1-SolutionsDocument5 pagesAssignment 1-SolutionsKaveendra KumarNo ratings yet
- Chapter Three: 3.2 Legendre Equation and Legendre PolynomialsDocument73 pagesChapter Three: 3.2 Legendre Equation and Legendre PolynomialsPatrick SibandaNo ratings yet
- Monte Carlo Integration LectureDocument8 pagesMonte Carlo Integration LectureNishant PandaNo ratings yet
- Assignment1 2019Document8 pagesAssignment1 2019হিমাংশু লোহানীNo ratings yet
- Lecture Notes 4: Fourier Analysis: DefinitionsDocument5 pagesLecture Notes 4: Fourier Analysis: DefinitionsIjaz TalibNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Tutorial - Chapter 4 (Transient Conduction) : Wednesday 19/02/2019 Venue: K303Document3 pagesTutorial - Chapter 4 (Transient Conduction) : Wednesday 19/02/2019 Venue: K303YemukelaniNo ratings yet
- Tutorial - Chapter 4 (Transient Conduction) : Wednesday 19/02/2019 Venue: K303Document4 pagesTutorial - Chapter 4 (Transient Conduction) : Wednesday 19/02/2019 Venue: K303YemukelaniNo ratings yet
- Computer Programming 143: Universiteit Stellenbosch UniversityDocument7 pagesComputer Programming 143: Universiteit Stellenbosch UniversityYemukelaniNo ratings yet
- Tutorial - Chapter 1: Basic Concepts: Wednesday 05/02/2020 Venue: K303Document2 pagesTutorial - Chapter 1: Basic Concepts: Wednesday 05/02/2020 Venue: K303YemukelaniNo ratings yet
- Computer Programming 143: Universiteit Stellenbosch UniversityDocument7 pagesComputer Programming 143: Universiteit Stellenbosch UniversityYemukelaniNo ratings yet
- Computer Programming 143: Universiteit Stellenbosch UniversityDocument9 pagesComputer Programming 143: Universiteit Stellenbosch UniversityYemukelaniNo ratings yet
- Thermodynamics and Fluid Dynamics 344 - 2014: (Laminar and Turbulent Boundary Layers)Document2 pagesThermodynamics and Fluid Dynamics 344 - 2014: (Laminar and Turbulent Boundary Layers)YemukelaniNo ratings yet
- Computer Programming 143: Universiteit Stellenbosch UniversityDocument9 pagesComputer Programming 143: Universiteit Stellenbosch UniversityYemukelaniNo ratings yet
- Computer Programming 143: Universiteit Stellenbosch UniversityDocument7 pagesComputer Programming 143: Universiteit Stellenbosch UniversityYemukelaniNo ratings yet
- B224 2017 Tut02 (Updated)Document2 pagesB224 2017 Tut02 (Updated)YemukelaniNo ratings yet
- Computer Programming 143: Universiteit Stellenbosch UniversityDocument9 pagesComputer Programming 143: Universiteit Stellenbosch UniversityYemukelaniNo ratings yet
- B224 2017 Tut03Document2 pagesB224 2017 Tut03YemukelaniNo ratings yet
- B224 2017 Tut04 (Updated)Document2 pagesB224 2017 Tut04 (Updated)YemukelaniNo ratings yet
- Thermodynamics and Fluid Dynamics 344 - 2014 Tutorial 1 (Laminar Boundary Layer)Document1 pageThermodynamics and Fluid Dynamics 344 - 2014 Tutorial 1 (Laminar Boundary Layer)YemukelaniNo ratings yet
- B224 2017 Tut05Document2 pagesB224 2017 Tut05YemukelaniNo ratings yet
- Toegepaste Wiskunde / Applied Mathematics B224: Tutoriaal 1 / Tutorial 1Document4 pagesToegepaste Wiskunde / Applied Mathematics B224: Tutoriaal 1 / Tutorial 1YemukelaniNo ratings yet
- Departement Meganiese Ingenieurswese Universiteit StellenboschDocument1 pageDepartement Meganiese Ingenieurswese Universiteit StellenboschYemukelaniNo ratings yet
- V&N 354 LectureLesing6Document7 pagesV&N 354 LectureLesing6YemukelaniNo ratings yet
- V&N 354 LectureLesing5Document7 pagesV&N 354 LectureLesing5YemukelaniNo ratings yet
- 2018 Tutorial 5Document4 pages2018 Tutorial 5YemukelaniNo ratings yet
- V&N 354 - LectureLesing1Document4 pagesV&N 354 - LectureLesing1YemukelaniNo ratings yet
- Thermodynamics A214 2018 PractDocument11 pagesThermodynamics A214 2018 PractYemukelaniNo ratings yet
- Coding Form BarangDocument7 pagesCoding Form Barangzalfa yourpackagingsolutionNo ratings yet
- METHODS and StrategiesDocument11 pagesMETHODS and StrategiesAlarde RolandoNo ratings yet
- Hershey & Chase WorksheetDocument1 pageHershey & Chase WorksheetlpaetznickNo ratings yet
- Latin Project (1st Term)Document2 pagesLatin Project (1st Term)zyt110104No ratings yet
- Laser Beam Machining Definition Working Process Principle Advantages Disadvantages Application NotesDocument4 pagesLaser Beam Machining Definition Working Process Principle Advantages Disadvantages Application NotesMD Al-AminNo ratings yet
- Hellenistic Core Formed Glass From EpirusDocument11 pagesHellenistic Core Formed Glass From EpirusGeorgianna LaviniaNo ratings yet
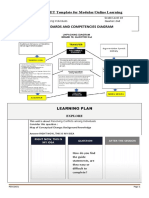
- 2021 JHS INSET Template For Modular/Online LearningDocument14 pages2021 JHS INSET Template For Modular/Online LearningMJ GuinacaranNo ratings yet
- Dental Radiography Principles and Techniques 4th Edition Iannucci Test BankDocument25 pagesDental Radiography Principles and Techniques 4th Edition Iannucci Test BankVanessaCurtisfcrxn100% (63)
- GPS and Its ApplicationsDocument15 pagesGPS and Its ApplicationsSonal MevadaNo ratings yet
- Mathematics Grade 7 QuestionsDocument23 pagesMathematics Grade 7 QuestionsnurucareinternationalNo ratings yet
- ReferencesDocument9 pagesReferencesRochelle TayanNo ratings yet
- Methods of Engineering AnalysisDocument25 pagesMethods of Engineering AnalysisRajnish KumarNo ratings yet
- How To Make Isometric Dimension and Text in AutoCADDocument5 pagesHow To Make Isometric Dimension and Text in AutoCADgia haiNo ratings yet
- TF2105-09-Sinusoids and PhasorsDocument26 pagesTF2105-09-Sinusoids and PhasorsGilbert SihombingNo ratings yet
- 1.JMX-XXX-XX-CAL-001-00 Rev.B1Document18 pages1.JMX-XXX-XX-CAL-001-00 Rev.B1Farid Ferdiansyah Tambunan0% (1)
- M Qasim Electrical EngineerDocument3 pagesM Qasim Electrical EngineerqasimNo ratings yet
- How To Create A Construction Waste Management PlanDocument2 pagesHow To Create A Construction Waste Management PlanjayvincentrubioNo ratings yet
- Social Psychology in IndiaDocument8 pagesSocial Psychology in IndianidhikukrejaworkNo ratings yet
- Pa 114 - Project Management: Roderick Tuling Olivar, MPA (CAR), CHRADocument9 pagesPa 114 - Project Management: Roderick Tuling Olivar, MPA (CAR), CHRACharibelle AvilaNo ratings yet
- Meaning and Relevance of History: Instructor: Venus Rhea B. BiacoDocument16 pagesMeaning and Relevance of History: Instructor: Venus Rhea B. BiacoPrincesNo ratings yet
- Business Research Methods: DR - Vittapu Email IDDocument31 pagesBusiness Research Methods: DR - Vittapu Email IDGizawNo ratings yet
- Ilao - Toribio Noel Job 1Document3 pagesIlao - Toribio Noel Job 1job ilaoNo ratings yet
- GrpAssgm - Requirements - ShellDocument3 pagesGrpAssgm - Requirements - ShellNURSYAMIMI ZANUDDINNo ratings yet
- Dr. Mian Ashfaq Ali: Mechanical Vibrations ME-421Document14 pagesDr. Mian Ashfaq Ali: Mechanical Vibrations ME-421Talha MohsinNo ratings yet
- Lecture 8 - Coal Power PlantsDocument49 pagesLecture 8 - Coal Power PlantsGomolemo BaarxxNo ratings yet
- Horizontal Vessel Slope RequirmentDocument2 pagesHorizontal Vessel Slope RequirmentVishal VarmaNo ratings yet
- World TB Day-Aurum InstituteDocument2 pagesWorld TB Day-Aurum InstituteKMNo ratings yet
- Electromagnetic TransducerDocument3 pagesElectromagnetic Transducerkriitka100% (1)
- FLOWSIC600 Product Presentation 2016Document62 pagesFLOWSIC600 Product Presentation 2016Osiros LunaNo ratings yet