Download as pdf or txt
You might also like
- Line-Commutated and Active PWMDocument2 pagesLine-Commutated and Active PWMAnonymous HyOfbJ650% (2)
- 02 ELECTRO-AVIONICS SYSTEMS Level 1Document198 pages02 ELECTRO-AVIONICS SYSTEMS Level 1Khoi Viet100% (1)
- Three Phase Igbt PWM Inverter ManualDocument6 pagesThree Phase Igbt PWM Inverter ManualShankar ArunmozhiNo ratings yet
- MODEL - QU - Modeling and Analysis of Electrical Machines - Set1Document2 pagesMODEL - QU - Modeling and Analysis of Electrical Machines - Set1Bala Subramanian80% (5)
- Chapter 1 - Steady State Stability of Electric Drives - ModifiedDocument10 pagesChapter 1 - Steady State Stability of Electric Drives - ModifiedMohammad Munzir100% (1)
- Synchronous Motor Drives: Open Loop V/F Control of Synchronous MotorDocument11 pagesSynchronous Motor Drives: Open Loop V/F Control of Synchronous MotorSaish Dalvi100% (1)
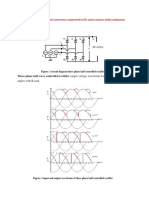
- DC Motor Three Phase Half & Full Controlled DrivesDocument5 pagesDC Motor Three Phase Half & Full Controlled DrivesUjjal Dey0% (1)
- Viva Questions On AlternatorsDocument6 pagesViva Questions On AlternatorsKashif Hussain RazwiNo ratings yet
- Speed Control of DC Motor Using ChopperDocument16 pagesSpeed Control of DC Motor Using Choppersunil kumarNo ratings yet
- 3-Phase Dual Converter DrivesDocument3 pages3-Phase Dual Converter DrivesAnb Bajwa100% (1)
- Fractional Kilowatt MotorsDocument37 pagesFractional Kilowatt MotorsPavan Kumar100% (1)
- Characteristics of Over Voltage RelayDocument3 pagesCharacteristics of Over Voltage RelaySasindran SNo ratings yet
- Voltage Control of InvertersDocument38 pagesVoltage Control of InvertersSindhujaSindhu100% (3)
- Methods of Controllable Var GenerationDocument12 pagesMethods of Controllable Var GenerationMary Morse100% (1)
- Seminar Report On Facts DevicesDocument35 pagesSeminar Report On Facts DevicesSuman Sharma100% (3)
- EE6504 Electrical Machines-II (2 Mark Q & A) PDFDocument16 pagesEE6504 Electrical Machines-II (2 Mark Q & A) PDFUnknownNo ratings yet
- Electrical BrakingDocument19 pagesElectrical BrakingAnilNo ratings yet
- Determine The Main Dimension of The CoreDocument2 pagesDetermine The Main Dimension of The CoreDipesh PatelNo ratings yet
- Ee6711 PSS Lab Viva QuestionsDocument10 pagesEe6711 PSS Lab Viva QuestionsshreeNo ratings yet
- Formation of Ybus by Singular Transformation-FinalDocument10 pagesFormation of Ybus by Singular Transformation-Finalsepidmehr0% (1)
- 1 Introduction To Electrical DrivesDocument45 pages1 Introduction To Electrical DrivesSetya Ardhi67% (3)
- Prob Unit 2 - 3 Q&ADocument5 pagesProb Unit 2 - 3 Q&AKarthikeyan Govindaraj100% (3)
- EE2303 - TD - 2 Marks With Answers & 16 Marks Questions - SHADHIKDocument34 pagesEE2303 - TD - 2 Marks With Answers & 16 Marks Questions - SHADHIKSaran Arun100% (1)
- Brake Test On DC Shunt MotorDocument5 pagesBrake Test On DC Shunt MotorkudupudinageshNo ratings yet
- Power BJT Switching CharacteristicsDocument29 pagesPower BJT Switching CharacteristicsShainy Peter100% (3)
- 9.speed Control of DC Motor Using Chopper DriveDocument8 pages9.speed Control of DC Motor Using Chopper DriveDhivya N100% (2)
- Exp. No: Date: Formation of Y-Bus Matrice by Direct Inspection Method Aim: To Determine The Admittance Matrices For The Given Power System NetworkDocument5 pagesExp. No: Date: Formation of Y-Bus Matrice by Direct Inspection Method Aim: To Determine The Admittance Matrices For The Given Power System NetworkSnehil ChandraNo ratings yet
- Exp. 4 - Determination of V Curves and Inverted V Curves of A Synchronous Motor and Regulation of Alternator With EMF and MMF Methed.Document10 pagesExp. 4 - Determination of V Curves and Inverted V Curves of A Synchronous Motor and Regulation of Alternator With EMF and MMF Methed.AbhishEk Singh67% (3)
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDocument15 pagesElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraNo ratings yet
- Single Phase Rectifier Fed DC Motor DriveDocument11 pagesSingle Phase Rectifier Fed DC Motor DriveNitesh kumar singh100% (1)
- Presentation - Presentation: DC To DC ConverterDocument20 pagesPresentation - Presentation: DC To DC ConverterDev Kumar100% (2)
- Traction MathDocument21 pagesTraction MathSomenath DuttaNo ratings yet
- Fixed Capacitor, Thyristor-Controlled Reactor (FC-TCR) : Dr. H.T. Jadhav Professor Electrical RITDocument5 pagesFixed Capacitor, Thyristor-Controlled Reactor (FC-TCR) : Dr. H.T. Jadhav Professor Electrical RITHT Jadhav100% (1)
- Problems in Circuit BreakersDocument15 pagesProblems in Circuit Breakersthangalakshmiprakash60% (5)
- Characterstics of Static Relay UndervoltageovervoltageDocument7 pagesCharacterstics of Static Relay Undervoltageovervoltagesaimanobhiram100% (2)
- Unit IV Static Relays and Numerical ProtectionDocument21 pagesUnit IV Static Relays and Numerical ProtectionShashank Reddy100% (1)
- Single Phase Dual ConverterDocument15 pagesSingle Phase Dual ConverterBhavin Bhanushali100% (11)
- 22 - UPF and LPF WattmetersDocument4 pages22 - UPF and LPF WattmetersvenkatNo ratings yet
- Unit I V 2 Mark Question Answer 16 Mark QuestionsDocument23 pagesUnit I V 2 Mark Question Answer 16 Mark QuestionspugazhendiraNo ratings yet
- Electric Drives by GK Dubey PDFDocument54 pagesElectric Drives by GK Dubey PDFTana Azeez100% (1)
- EM-I Lab Viva Questions Updated OnDocument6 pagesEM-I Lab Viva Questions Updated OnNagamohan BilluNo ratings yet
- Power Electronics VivaDocument7 pagesPower Electronics VivaAbhay Shankar Bharadwaj100% (1)
- Tutsheet5 SolutionsDocument5 pagesTutsheet5 SolutionsDevendra Singhaniya90% (10)
- Lecture 14 Chopper Fed DC DrivesDocument6 pagesLecture 14 Chopper Fed DC DrivesNadjNo ratings yet
- Module 5 Psa-2 18ee71Document22 pagesModule 5 Psa-2 18ee71Check This Tech100% (3)
- Power Electronics Lab Indirect QuestionsDocument2 pagesPower Electronics Lab Indirect Questionssuriyamariappan0% (1)
- DC Motor 2 Marks QuestionsDocument3 pagesDC Motor 2 Marks QuestionsAbhishek100% (1)
- Unit-3-Power Flow Analysis in AC DC SystemsDocument21 pagesUnit-3-Power Flow Analysis in AC DC Systemsravikumar_rangan100% (1)
- DC Motor Lecture Notes 4Document24 pagesDC Motor Lecture Notes 4Man Ebook100% (1)
- Concept of GMR and GMDDocument3 pagesConcept of GMR and GMDジェイ センニュリンNo ratings yet
- Transmission and Distribution - Lecture Notes, Study Material and Important Questions, AnswersDocument7 pagesTransmission and Distribution - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVNo ratings yet
- Electric BrakingDocument27 pagesElectric Brakingmastanamma.YNo ratings yet
- Advantages and Disadvantages of Per Unit SystemDocument4 pagesAdvantages and Disadvantages of Per Unit SystemMd Shaifullah ShakilNo ratings yet
- Distributed Generation NotesDocument21 pagesDistributed Generation Notessvuce201175% (4)
- Methods of Starting, Accelerating Time, Energy Loss During StartingDocument8 pagesMethods of Starting, Accelerating Time, Energy Loss During Startingmastanamma.YNo ratings yet
- Single Phase Series InverterDocument9 pagesSingle Phase Series InverterDhivya NNo ratings yet
- Solid State Drives Short BookDocument16 pagesSolid State Drives Short BookGomathi Raja MNo ratings yet
- Unit - V Synchronous Drives: 1 Variable Frequency ControlDocument22 pagesUnit - V Synchronous Drives: 1 Variable Frequency ControlHaripriya PalemNo ratings yet
- Synchronous Motor AC DrivesDocument40 pagesSynchronous Motor AC DrivesHarshal Thakur100% (1)
- Unit-V SSD PDFDocument6 pagesUnit-V SSD PDFSanjay NichatNo ratings yet
- Speed Control Methods of Induction MotorDocument6 pagesSpeed Control Methods of Induction MotorsahebraoNo ratings yet
- College Details 2023 WordDocument10 pagesCollege Details 2023 WordSuganthiVasanNo ratings yet
- A Systematic Review of The Effect of NocDocument9 pagesA Systematic Review of The Effect of NocSuganthiVasanNo ratings yet
- Rit Brochure 23-24Document8 pagesRit Brochure 23-24SuganthiVasanNo ratings yet
- Ge3753 Engineering Economics and Financial AccountingDocument1 pageGe3753 Engineering Economics and Financial AccountingSuganthiVasanNo ratings yet
- SECURITYDocument28 pagesSECURITYSuganthiVasanNo ratings yet
- DM (Unit-3) - 1Document34 pagesDM (Unit-3) - 1SuganthiVasanNo ratings yet
- Biotecnika Workshop Calendar - Tentative - 2Document3 pagesBiotecnika Workshop Calendar - Tentative - 2SuganthiVasanNo ratings yet
- Future TenseDocument2 pagesFuture TenseSuganthiVasanNo ratings yet
- BIOT 3 SEM TimetableDocument1 pageBIOT 3 SEM TimetableSuganthiVasanNo ratings yet
- Green TechDocument4 pagesGreen TechSuganthiVasanNo ratings yet
- Code GenerationDocument62 pagesCode GenerationSuganthiVasanNo ratings yet
- For Unit 2Document11 pagesFor Unit 2SuganthiVasanNo ratings yet
- 21ad33 Principles of AiDocument2 pages21ad33 Principles of AiSuganthiVasanNo ratings yet
- B e MaeDocument40 pagesB e MaeSuganthiVasanNo ratings yet
- Mahaaraj PhamphletDocument2 pagesMahaaraj PhamphletSuganthiVasanNo ratings yet
- Abdelwahab Alsammak - Lecture-1-IntroductionDocument43 pagesAbdelwahab Alsammak - Lecture-1-IntroductionSuganthiVasanNo ratings yet
- Circular (R-2021) - UGDocument1 pageCircular (R-2021) - UGSuganthiVasanNo ratings yet
- Review QuestionsDocument15 pagesReview QuestionsSuganthiVasanNo ratings yet
- Computer Network Handwritten NotesDocument12 pagesComputer Network Handwritten NotesSuganthiVasan100% (2)
- குங்குமம் 19.08.2022Document132 pagesகுங்குமம் 19.08.2022SuganthiVasanNo ratings yet
- Life ProcessesDocument2 pagesLife ProcessesSuganthiVasanNo ratings yet
- Java Graphics ProgrammingDocument4 pagesJava Graphics ProgrammingSuganthiVasanNo ratings yet
- B E AeronaticalDocument42 pagesB E AeronaticalSuganthiVasanNo ratings yet
- B.E. Aerospace EnggDocument41 pagesB.E. Aerospace EnggSuganthiVasanNo ratings yet
- B E AutomobileDocument40 pagesB E AutomobileSuganthiVasanNo ratings yet
- குங்குமம் 26-08-2022Document132 pagesகுங்குமம் 26-08-2022SuganthiVasanNo ratings yet
- B E ManufDocument40 pagesB E ManufSuganthiVasanNo ratings yet
- B E MechatronicsDocument46 pagesB E MechatronicsSuganthiVasanNo ratings yet
- B e EteDocument42 pagesB e EteSuganthiVasanNo ratings yet
- B Tech CSBSDocument43 pagesB Tech CSBSSuganthiVasanNo ratings yet
- Panasonic Kx-tg6411 (ET) Service ManualDocument26 pagesPanasonic Kx-tg6411 (ET) Service Manualcrmblogger100% (1)
- SRM449TN 450Document2 pagesSRM449TN 450theodorakis017781No ratings yet
- Siepan 8pu LV Switchboards Catalogue 2019Document4 pagesSiepan 8pu LV Switchboards Catalogue 2019Automation WorksNo ratings yet
- Battery Maintenance YZDocument21 pagesBattery Maintenance YZGUILLERMONo ratings yet
- GE8261-EPL Lab Manual 2018-19 FinalDocument97 pagesGE8261-EPL Lab Manual 2018-19 FinalSrini Vasa100% (1)
- Controlador ASM18G GrupoDocument16 pagesControlador ASM18G Grupowillyedercc100% (1)
- Air-Conditioner Using Peltier ModulesDocument2 pagesAir-Conditioner Using Peltier ModulesVIPIN KUMARNo ratings yet
- JA Solar JAM5 (L) - 72-200 - SI (200W) Solar PanelDocument2 pagesJA Solar JAM5 (L) - 72-200 - SI (200W) Solar PanelVictor OliveiraNo ratings yet
- Practical Work 3 Zener DiodeDocument9 pagesPractical Work 3 Zener Diodeumminatasya1123No ratings yet
- Advantages and Disadvantages of SMPSDocument1 pageAdvantages and Disadvantages of SMPSSathishkumar PragasamNo ratings yet
- Liebert PEX Condenser User Manual AP11ENT PEXCondenserV1 UMDocument21 pagesLiebert PEX Condenser User Manual AP11ENT PEXCondenserV1 UMAndi IshakaNo ratings yet
- PN Junction Lecture NotesDocument10 pagesPN Junction Lecture Notessuperbangadak100% (1)
- B6 ProblemsDocument18 pagesB6 ProblemsMohit SahuNo ratings yet
- Feeding Power To Arduino - The Ultimate GuideDocument24 pagesFeeding Power To Arduino - The Ultimate GuideMUSTAFANo ratings yet
- Co Project: Edge Avoiding Robot USING 8051 MicrocontrollerDocument14 pagesCo Project: Edge Avoiding Robot USING 8051 MicrocontrollerJuthik BVNo ratings yet
- Modeling & Simulation Based Approach of PV System in Simulink ModelDocument8 pagesModeling & Simulation Based Approach of PV System in Simulink ModelsirishaNo ratings yet
- Circuits & Layout: N. Weste D. HarrisDocument50 pagesCircuits & Layout: N. Weste D. HarrisSiam HasanNo ratings yet
- SEMIKRON Technical Explanation SEMiX5 1200V MLI SKYPER12 Driver Board en 2020-01-21 Rev-05Document20 pagesSEMIKRON Technical Explanation SEMiX5 1200V MLI SKYPER12 Driver Board en 2020-01-21 Rev-05mateus santosNo ratings yet
- Unit 5 TrasformerDocument22 pagesUnit 5 TrasformerMahesh sunnyNo ratings yet
- Substation Engineering & LayoutDocument4 pagesSubstation Engineering & Layoutgulatimanish1985No ratings yet
- Practice Exam 1a (Solutions)Document5 pagesPractice Exam 1a (Solutions)frazierNo ratings yet
- 43.6 Electric Circuits CIE IGCSE Physics Practical QPDocument11 pages43.6 Electric Circuits CIE IGCSE Physics Practical QPThe lonely ninjaNo ratings yet
- Thank You For Choosing ENDA ET2411 ON/OFF Heat ControllerDocument2 pagesThank You For Choosing ENDA ET2411 ON/OFF Heat Controllersakis72No ratings yet
- 6.6 Voltage Stability: V-Q Sensitivity Is Negative For at Least One Bus, The System Is Voltage UnstableDocument5 pages6.6 Voltage Stability: V-Q Sensitivity Is Negative For at Least One Bus, The System Is Voltage Unstableveeru_puppalaNo ratings yet
- Diode LogicDocument2 pagesDiode LogicMahesh YadavNo ratings yet
- Product Data Sheet 3RH1911-2GA22Document4 pagesProduct Data Sheet 3RH1911-2GA22Franisco Daniel SanchezNo ratings yet
- Innovative: CS650 and CS655Document2 pagesInnovative: CS650 and CS655MKEBRENo ratings yet
- Sencore Parts ListDocument7 pagesSencore Parts ListForrestWeaverNo ratings yet
- Crown Install GuideDocument6 pagesCrown Install GuideConquest97No ratings yet