Download as pdf or txt
You might also like
- Golf Mk1 ManualDocument98 pagesGolf Mk1 ManualFilip Filipovic100% (2)
- Kioti Daedong DK45S Tractor Service Repair Manual PDFDocument14 pagesKioti Daedong DK45S Tractor Service Repair Manual PDFfujsjefkksem0% (3)
- 12PFrames and Machines Problems 2017B PDFDocument30 pages12PFrames and Machines Problems 2017B PDFzulboatNo ratings yet
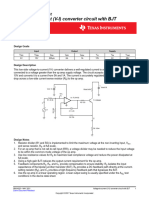
- 4L60E Converter Valves:: Operation, Test Procedures and The Effects of WearDocument5 pages4L60E Converter Valves:: Operation, Test Procedures and The Effects of WeartranstechozNo ratings yet
- RE0F10A - JF011E - RE0F06A Repair Part1 NisanDocument6 pagesRE0F10A - JF011E - RE0F06A Repair Part1 Nisandpian100% (2)
- 83 Transistor3 PDFDocument1 page83 Transistor3 PDFarturoNo ratings yet
- Uas KalkuDocument3 pagesUas KalkuBerlin F RNo ratings yet
- Theory of Machines VibrationsDocument45 pagesTheory of Machines VibrationsMishra Group Pvt LtdNo ratings yet
- Theory of Machines Vibrations GATE 2020Document45 pagesTheory of Machines Vibrations GATE 2020Franklin ClintonNo ratings yet
- Graficos RC 041147Document2 pagesGraficos RC 041147brandaocamilly39No ratings yet
- Bode PlotDocument5 pagesBode PlotMr. nobodyNo ratings yet
- MoelDocument4 pagesMoelgayathriNo ratings yet
- Module 4 - Bode PlotsDocument63 pagesModule 4 - Bode PlotsPoovaiahkkNishanNo ratings yet
- Class Test 2017-18: Electrical EngineeringDocument11 pagesClass Test 2017-18: Electrical EngineeringNikhil KashyapNo ratings yet
- Kapasitas Lateral - Lpile RevDocument30 pagesKapasitas Lateral - Lpile RevUsep SNo ratings yet
- Chapter 19 (B) PPDocument9 pagesChapter 19 (B) PPReal ConfusionNo ratings yet
- Silicon PNP Power Transistor 2SA1102: J. II U, Mi-L, Onau - Ctoi J Loaucti, OneDocument3 pagesSilicon PNP Power Transistor 2SA1102: J. II U, Mi-L, Onau - Ctoi J Loaucti, OnezekemeloNo ratings yet
- Reviewed 4. Power Electronics-12Document14 pagesReviewed 4. Power Electronics-12shivang agrawalNo ratings yet
- Basic Problems in AC CktsDocument13 pagesBasic Problems in AC CktsMonica SreevalliNo ratings yet
- BEEE QB Hints and Solutions Cat1Document3 pagesBEEE QB Hints and Solutions Cat1Desi VinesNo ratings yet
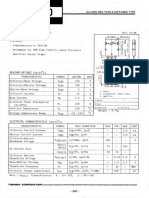
- NPN Diffused Type: Silicon TripleDocument2 pagesNPN Diffused Type: Silicon TripleLaZúu DomiciliosNo ratings yet
- Solving: VelocityDocument1 pageSolving: VelocityOscar MinjNo ratings yet
- 實驗7-電晶體工作原理及特性 2023-04-09 12 - 52 - 14 -Document9 pages實驗7-電晶體工作原理及特性 2023-04-09 12 - 52 - 14 -AnonymityNo ratings yet
- Lab BJT Ce ConfiDocument5 pagesLab BJT Ce ConfiNoman RathoreNo ratings yet
- KN3904SDocument3 pagesKN3904Saderlindo sátiroNo ratings yet
- Sboa 325Document6 pagesSboa 325abhishek tiwariNo ratings yet
- Ac and DC Biasing-Bjts and Fet: Learning ObjectivesDocument24 pagesAc and DC Biasing-Bjts and Fet: Learning ObjectiveskalyanNo ratings yet
- Seção A-ADocument1 pageSeção A-A8zy9yhx7fnNo ratings yet
- Chheda Electricals & Electronics Pvt. LTD.: Product Category: Electronic Ignition UnitDocument3 pagesChheda Electricals & Electronics Pvt. LTD.: Product Category: Electronic Ignition UnitNaveen KumarNo ratings yet
- ITA1037AK : 1. Ordering and Marking InformationDocument4 pagesITA1037AK : 1. Ordering and Marking Informationluis lopezNo ratings yet
- Electronic Devices 9th Edition - CHP 5 Basic ProblemsDocument5 pagesElectronic Devices 9th Edition - CHP 5 Basic ProblemsThivhulawi MukondeleliNo ratings yet
- Filled Composite Column Design Based On AISC 360-10/16 & ACI 318-19Document1 pageFilled Composite Column Design Based On AISC 360-10/16 & ACI 318-19Prolay MannaNo ratings yet
- Degree Electronic Engineeringe First Semester EXAMINATIONS 2020/2021Document3 pagesDegree Electronic Engineeringe First Semester EXAMINATIONS 2020/2021Peter JumreNo ratings yet
- 2-Charc of DC Series GeneratorDocument3 pages2-Charc of DC Series GeneratorGANESH KUMAR B eee2018No ratings yet
- 14 D J 2011 - S 3.9 E Viii 13:00/16:00H: Departamento de Engenharia Electrotécnica 1º E E IIIDocument2 pages14 D J 2011 - S 3.9 E Viii 13:00/16:00H: Departamento de Engenharia Electrotécnica 1º E E IIIHelder CruzNo ratings yet
- Unidade Injetora 2Document5 pagesUnidade Injetora 2Edson CostaNo ratings yet
- Data SheetDocument1 pageData SheetdardoNo ratings yet
- Obsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)Document5 pagesObsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)luis daniel suarez narvaezNo ratings yet
- Frequency Analysis-Plethysmograph Waves: Plethysmograph Waveform (Pre-Exercise)Document1 pageFrequency Analysis-Plethysmograph Waves: Plethysmograph Waveform (Pre-Exercise)davidleraolNo ratings yet
- Uow - Power Electronics 3 - 2020Document14 pagesUow - Power Electronics 3 - 2020FUCKYOUNo ratings yet
- kn4402s kn4403sDocument3 pageskn4402s kn4403smr.dominic3415No ratings yet
- Chapter 11 Part IDocument39 pagesChapter 11 Part Imstan11No ratings yet
- Mathcad - C02-C6Document8 pagesMathcad - C02-C6Krish ChandNo ratings yet
- Semiconductor 2N3906S: Technical DataDocument4 pagesSemiconductor 2N3906S: Technical DatabedusmadeNo ratings yet
- Mccsemi: FeaturesDocument2 pagesMccsemi: FeaturesByronD88No ratings yet
- Test Dekm3753 20192020Document9 pagesTest Dekm3753 20192020Jacky YapNo ratings yet
- "World's Hardest Easy Geometry Problem": ACD EDocument21 pages"World's Hardest Easy Geometry Problem": ACD EAldhi PrastyaNo ratings yet
- Way To Polytechnic: Time: 3HrsDocument11 pagesWay To Polytechnic: Time: 3HrsBIPUL KUMAR OFFICIALNo ratings yet
- Diode Circuit - DPP 03 (Of Lec 09)Document3 pagesDiode Circuit - DPP 03 (Of Lec 09)devdipika992434No ratings yet
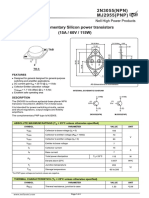
- Complementary Silicon Power Transistors (15A / 60V / 115W) : MJ2955 (PNP) 2N3055 (NPN)Document4 pagesComplementary Silicon Power Transistors (15A / 60V / 115W) : MJ2955 (PNP) 2N3055 (NPN)fafaNo ratings yet
- MJ 2955Document4 pagesMJ 2955Lilik Sunarko SunarjiNo ratings yet
- S8550 маркировка 2TY JCSTDocument2 pagesS8550 маркировка 2TY JCSTZaegorNo ratings yet
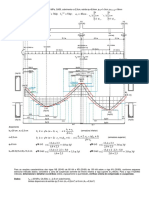
- Ex - Viga Resolucao 2015Document2 pagesEx - Viga Resolucao 2015RsiggyNo ratings yet
- Silicon NPN Epitaxial Planar: ApplicationDocument12 pagesSilicon NPN Epitaxial Planar: ApplicationMax RenanNo ratings yet
- Acoustic Calculation of Ventilation SystemDocument4 pagesAcoustic Calculation of Ventilation SystemSatyajit MNo ratings yet
- Bode Plot PDFDocument41 pagesBode Plot PDFdolaNo ratings yet
- Mchunu Lindokuhle CO2 Pre-PracDocument10 pagesMchunu Lindokuhle CO2 Pre-PracLungani MthethwaNo ratings yet
- Ee304 20180912 SP TH NTDocument21 pagesEe304 20180912 SP TH NTJoyprakash LairenlakpamNo ratings yet
- Bridge Column Design Based On AASHTO 17th & ACI 318-19: Input Data & Design SummaryDocument2 pagesBridge Column Design Based On AASHTO 17th & ACI 318-19: Input Data & Design SummaryMadhusudan ShewalkarNo ratings yet
- Silicon Epitaxial 2SC2564Document2 pagesSilicon Epitaxial 2SC2564Wagner PepelegalNo ratings yet
- Prop En1065 C-D35Document1 pageProp En1065 C-D35alessandroNo ratings yet
- 2SB631,631K/2SD600,600K: 100V/120V, 1A Low-Frequency Power Amplifier ApplicationsDocument4 pages2SB631,631K/2SD600,600K: 100V/120V, 1A Low-Frequency Power Amplifier ApplicationsLuis RinconNo ratings yet
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsFrom EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNo ratings yet
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- Ge3753 Engineering Economics and Financial AccountingDocument1 pageGe3753 Engineering Economics and Financial AccountingSuganthiVasanNo ratings yet
- A Systematic Review of The Effect of NocDocument9 pagesA Systematic Review of The Effect of NocSuganthiVasanNo ratings yet
- 21ad33 Principles of AiDocument2 pages21ad33 Principles of AiSuganthiVasanNo ratings yet
- DM (Unit-3) - 1Document34 pagesDM (Unit-3) - 1SuganthiVasanNo ratings yet
- College Details 2023 WordDocument10 pagesCollege Details 2023 WordSuganthiVasanNo ratings yet
- SECURITYDocument28 pagesSECURITYSuganthiVasanNo ratings yet
- Green TechDocument4 pagesGreen TechSuganthiVasanNo ratings yet
- Computer Network Handwritten NotesDocument12 pagesComputer Network Handwritten NotesSuganthiVasan100% (2)
- Code GenerationDocument62 pagesCode GenerationSuganthiVasanNo ratings yet
- BIOT 3 SEM TimetableDocument1 pageBIOT 3 SEM TimetableSuganthiVasanNo ratings yet
- For Unit 2Document11 pagesFor Unit 2SuganthiVasanNo ratings yet
- Biotecnika Workshop Calendar - Tentative - 2Document3 pagesBiotecnika Workshop Calendar - Tentative - 2SuganthiVasanNo ratings yet
- Rit Brochure 23-24Document8 pagesRit Brochure 23-24SuganthiVasanNo ratings yet
- Future TenseDocument2 pagesFuture TenseSuganthiVasanNo ratings yet
- Life ProcessesDocument2 pagesLife ProcessesSuganthiVasanNo ratings yet
- Java Graphics ProgrammingDocument4 pagesJava Graphics ProgrammingSuganthiVasanNo ratings yet
- B E AutomobileDocument40 pagesB E AutomobileSuganthiVasanNo ratings yet
- Mahaaraj PhamphletDocument2 pagesMahaaraj PhamphletSuganthiVasanNo ratings yet
- Review QuestionsDocument15 pagesReview QuestionsSuganthiVasanNo ratings yet
- Abdelwahab Alsammak - Lecture-1-IntroductionDocument43 pagesAbdelwahab Alsammak - Lecture-1-IntroductionSuganthiVasanNo ratings yet
- குங்குமம் 19.08.2022Document132 pagesகுங்குமம் 19.08.2022SuganthiVasanNo ratings yet
- B e MaeDocument40 pagesB e MaeSuganthiVasanNo ratings yet
- B E MechatronicsDocument46 pagesB E MechatronicsSuganthiVasanNo ratings yet
- B.E. Aerospace EnggDocument41 pagesB.E. Aerospace EnggSuganthiVasanNo ratings yet
- குங்குமம் 26-08-2022Document132 pagesகுங்குமம் 26-08-2022SuganthiVasanNo ratings yet
- B E AeronaticalDocument42 pagesB E AeronaticalSuganthiVasanNo ratings yet
- Circular (R-2021) - UGDocument1 pageCircular (R-2021) - UGSuganthiVasanNo ratings yet
- B E ManufDocument40 pagesB E ManufSuganthiVasanNo ratings yet
- B Tech CSBSDocument43 pagesB Tech CSBSSuganthiVasanNo ratings yet
- B e EteDocument42 pagesB e EteSuganthiVasanNo ratings yet
- Apache RTR 180 Bike Parts Update - Sheet1Document1 pageApache RTR 180 Bike Parts Update - Sheet1Debasish RoyNo ratings yet
- Kyron 1 Engine 002 04 003Document18 pagesKyron 1 Engine 002 04 003Anderson BombistaNo ratings yet
- Modul 3 - Contoh PREDICTIVE MAINTENANCE-1Document59 pagesModul 3 - Contoh PREDICTIVE MAINTENANCE-1dianNo ratings yet
- GENSET ROOM 1 X 100 KVADocument5 pagesGENSET ROOM 1 X 100 KVAcRi SocietyNo ratings yet
- Give Me A Boost!: Plumbing Design by The NumbersDocument2 pagesGive Me A Boost!: Plumbing Design by The NumbersSuhas NatuNo ratings yet
- Eni CLADIUM S 400Document1 pageEni CLADIUM S 400ranjanguptNo ratings yet
- Gibson Parts ListDocument8 pagesGibson Parts Listscurry39No ratings yet
- Cranes TuskerDocument2 pagesCranes TuskerJohan Conradie (MTS)No ratings yet
- Brosur Mesin Merk ABC PDFDocument1 pageBrosur Mesin Merk ABC PDFIndra Syahputra ManoyNo ratings yet
- 924F 3114 3116 Engine Valve Lash - InspectAdjustDocument3 pages924F 3114 3116 Engine Valve Lash - InspectAdjustReymundo Enrique Dominguez HernandezNo ratings yet
- Bosch Motorsport - Fuel Pump FP 200Document2 pagesBosch Motorsport - Fuel Pump FP 200kumarNo ratings yet
- Charan SeminorDocument19 pagesCharan SeminorSai Krishna SKNo ratings yet
- Transmission Piping 3 3Document1 pageTransmission Piping 3 3valterripNo ratings yet
- Marauder TunesDocument3 pagesMarauder Tunesxanxox321No ratings yet
- 3 Chiller T&C 2011Document9 pages3 Chiller T&C 2011Dtl SarozNo ratings yet
- Crankshaft AlignmentDocument4 pagesCrankshaft AlignmentPPG Construction CorporationNo ratings yet
- Industrial Drives SyllabusDocument2 pagesIndustrial Drives SyllabusStishuk HFNo ratings yet
- TR200 EngDocument10 pagesTR200 EngYipper ShnipperNo ratings yet
- TPL76-C.. List of Spare Parts: Page 1 Von 1Document1 pageTPL76-C.. List of Spare Parts: Page 1 Von 1Yash PandyaNo ratings yet
- Electrical BooksDocument76 pagesElectrical BooksGary Nugas0% (1)
- 13-79 Pistons and Connecting Rods Assembly PDFDocument8 pages13-79 Pistons and Connecting Rods Assembly PDFmefisto06cNo ratings yet
- SPH-Osteomed M4 Dan HPS RSUD. Sumber RejoDocument14 pagesSPH-Osteomed M4 Dan HPS RSUD. Sumber RejoDiah Esti HapsariNo ratings yet
- Automotive Engine ElectronicsDocument4 pagesAutomotive Engine Electronicsmachine tunisieNo ratings yet
- SCANIA Suspension BT200 Work DescDocument32 pagesSCANIA Suspension BT200 Work DescHeri Suryo0% (1)
- Starting Motor 5 5KW 22170 1Document2 pagesStarting Motor 5 5KW 22170 1Anonymous cS9UMvhBqNo ratings yet
- SPE 112881 Slip Calculation of Rotational Speed of Electrical Submersible Progressive Cavity PumpsDocument9 pagesSPE 112881 Slip Calculation of Rotational Speed of Electrical Submersible Progressive Cavity PumpsDeisy SteffaniaNo ratings yet