Download as pdf or txt
You might also like
- Smith Hubert The Illustrated Guide To AerodynamicsDocument244 pagesSmith Hubert The Illustrated Guide To AerodynamicsStrahinja Donic100% (3)
- Southwest Airlines - Print Boarding Passes and Security DocumentsDocument2 pagesSouthwest Airlines - Print Boarding Passes and Security Documentsm_forge2No ratings yet
- Air Crash Investigation - QANTASDocument16 pagesAir Crash Investigation - QANTASKabilan SiranjiviNo ratings yet
- Full Length Article: SciencedirectDocument14 pagesFull Length Article: SciencedirectnicolasNo ratings yet
- Futuretransp 01 00033 v3Document24 pagesFuturetransp 01 00033 v3Reinaldo RamírezNo ratings yet
- Transportation Research Part DDocument15 pagesTransportation Research Part DCarlos Mario De León Jimenez NeiraNo ratings yet
- Real-World Automotive Emissions: Monitoring Methodologies, and Control MeasuresDocument32 pagesReal-World Automotive Emissions: Monitoring Methodologies, and Control MeasuresGohar BhattiNo ratings yet
- Eevc 2014Document12 pagesEevc 2014ThejaswiniNo ratings yet
- Analysis of Energies and Speed Profiles of Driving Cycles For Fuel Consumption MeasurementsDocument7 pagesAnalysis of Energies and Speed Profiles of Driving Cycles For Fuel Consumption MeasurementsRobert Michael CorpusNo ratings yet
- And Conventional Vehicle Performance Over Eco-Driving Cycles: Energy Benefits and Component LossDocument12 pagesAnd Conventional Vehicle Performance Over Eco-Driving Cycles: Energy Benefits and Component Lossom nishadNo ratings yet
- Estimating The CO Emissions Reduction Potential of Various Technologies in European Trucks Using VECTO SimulatorDocument19 pagesEstimating The CO Emissions Reduction Potential of Various Technologies in European Trucks Using VECTO SimulatorFranklin BoadaNo ratings yet
- Wang 2010Document9 pagesWang 2010Flavio Vilca pintoNo ratings yet
- Electric Vehicle Conversion: Optimisation of Parameters in The Design ProcessDocument7 pagesElectric Vehicle Conversion: Optimisation of Parameters in The Design Processmicovic.vptsNo ratings yet
- Electric VehicleDocument6 pagesElectric VehicleATIF KHANNo ratings yet
- Impact of Vehicle Add-Ons On Energy Consumption and Greenhouse Gas EmissionsDocument9 pagesImpact of Vehicle Add-Ons On Energy Consumption and Greenhouse Gas EmissionsRaynaldiNo ratings yet
- Energies-16-01950-Vf (Artículo Modelo)Document29 pagesEnergies-16-01950-Vf (Artículo Modelo)Jorge CarrionNo ratings yet
- Simulation of Fuel Economy For Malaysian Urban Driving M.A. Abas, M.F. Muhamad Said, S.F. Zainal Abidin and I. ZahariDocument11 pagesSimulation of Fuel Economy For Malaysian Urban Driving M.A. Abas, M.F. Muhamad Said, S.F. Zainal Abidin and I. ZahariFadh EpulNo ratings yet
- Machines 12 00009 v3Document18 pagesMachines 12 00009 v3nordquist.manufacturingNo ratings yet
- Impact of Electronic Toll Collection and Electronic Screening On Heavy-Duty Vehicle EmissionsDocument11 pagesImpact of Electronic Toll Collection and Electronic Screening On Heavy-Duty Vehicle EmissionsJobaer Al-MahmudNo ratings yet
- Crashworthiness Aspects of Electric Vehicle DesignDocument21 pagesCrashworthiness Aspects of Electric Vehicle DesigngfdczxNo ratings yet
- Tuvsud Meeting International Automotive Emissions and Fuel Efficiency Regulations PDFDocument12 pagesTuvsud Meeting International Automotive Emissions and Fuel Efficiency Regulations PDFKarni Aerospace Inc.No ratings yet
- 71 Paper 0520010142Document4 pages71 Paper 0520010142Vishal Kiran BartakkeNo ratings yet
- Catalysts 13 00067 v3Document40 pagesCatalysts 13 00067 v3Đại HảiNo ratings yet
- Business Case For Electric Vehicle Use in Service Vehicle Fleets - CompressDocument40 pagesBusiness Case For Electric Vehicle Use in Service Vehicle Fleets - CompressHellmanImbachiMuñozNo ratings yet
- Davar I 2017Document13 pagesDavar I 2017Shiva HareshNo ratings yet
- 1 s2.0 S2666546821000641 MainDocument9 pages1 s2.0 S2666546821000641 MainSidharth MaheshNo ratings yet
- IJETR032163Document5 pagesIJETR032163erpublicationNo ratings yet
- Longer and Heavy VehiclesDocument49 pagesLonger and Heavy VehiclesMarcusHuynh88No ratings yet
- T. FletcherDocument13 pagesT. FletcherDiep Hau ThanNo ratings yet
- A Platoon Based Cooperative Eco-Driving Model For Mixed Automated and Human-Driven Vehicles at A Signalised IntersectionDocument20 pagesA Platoon Based Cooperative Eco-Driving Model For Mixed Automated and Human-Driven Vehicles at A Signalised Intersection张晗钰No ratings yet
- Impact of Stops On Vehicle Fuel Consumption and emDocument18 pagesImpact of Stops On Vehicle Fuel Consumption and emPaolo Angelo GutierrezNo ratings yet
- A Comparative Study On Fuel Consumption Prediction Methods of Heavy-Duty Diesel Trucks Considering 21 Influencing FactorsDocument18 pagesA Comparative Study On Fuel Consumption Prediction Methods of Heavy-Duty Diesel Trucks Considering 21 Influencing FactorsrobsonNo ratings yet
- 2010 Hybrid PowertrainDocument7 pages2010 Hybrid PowertrainsbkhalilNo ratings yet
- Ship Energy Management System Development and Experimental Evalu - 2022 - ApplieDocument19 pagesShip Energy Management System Development and Experimental Evalu - 2022 - ApplieDAN CHAMZNo ratings yet
- EnergyDocument13 pagesEnergyspellsinger123No ratings yet
- Barth Et Al. 2004 - Modal Emissions Model For Heavy-Duty Diesel VehiclesDocument12 pagesBarth Et Al. 2004 - Modal Emissions Model For Heavy-Duty Diesel VehiclesPedro MunizNo ratings yet
- Real-World Driving Cycles Adaptability of Electric Vehicles: Zhicheng Sun, Zui Wen, Xin Zhao, Yunpeng Yang and Su LiDocument22 pagesReal-World Driving Cycles Adaptability of Electric Vehicles: Zhicheng Sun, Zui Wen, Xin Zhao, Yunpeng Yang and Su LicorranNo ratings yet
- Costs and BenefitsDocument92 pagesCosts and BenefitsENGMECnandoNo ratings yet
- Diesel Electric Locomotive ComponentsDocument10 pagesDiesel Electric Locomotive Componentssimbairvine23No ratings yet
- Wang 2015Document10 pagesWang 2015Deepansha TyagiNo ratings yet
- Review of Research On Vehicles Aerodynamic Drag Reduction MethodsDocument13 pagesReview of Research On Vehicles Aerodynamic Drag Reduction MethodshutkuosliNo ratings yet
- An Environmental Life Cycle Assessment of Forklift Operation: A Well-To-Wheel AnalysisDocument14 pagesAn Environmental Life Cycle Assessment of Forklift Operation: A Well-To-Wheel AnalysisMuhammad Imran KhanNo ratings yet
- 2013 24 0150 - FinalDocument12 pages2013 24 0150 - FinalFranklin BoadaNo ratings yet
- 6Analysing the real-world fuel and energy consumption of conventional andDocument19 pages6Analysing the real-world fuel and energy consumption of conventional andzjq1432031523No ratings yet
- Environmental Impacts of Hybrid and Electric Vehicles - A ReviewDocument18 pagesEnvironmental Impacts of Hybrid and Electric Vehicles - A ReviewMikael AldenNo ratings yet
- Roy2017 UlteraDocument12 pagesRoy2017 UlteraAdriano Aj-formataçãoNo ratings yet
- Liben ReviewDocument11 pagesLiben Reviewsamuel melkamuNo ratings yet
- 2018-63 Lifecycle Analysis of Electric Vehicles - KukrejaDocument21 pages2018-63 Lifecycle Analysis of Electric Vehicles - KukrejaMufid SyedNo ratings yet
- Sudin IrodynamicDocument14 pagesSudin IrodynamicAminNo ratings yet
- Experimental Researchof Transmissionson Electric VehicleDocument16 pagesExperimental Researchof Transmissionson Electric VehicleRam MishraNo ratings yet
- Applsci 13 09843Document22 pagesApplsci 13 09843Martins EhichoyaNo ratings yet
- 1646 ArticleText 3157 2 10 20201022Document14 pages1646 ArticleText 3157 2 10 20201022Erickson OngNo ratings yet
- Nonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesDocument6 pagesNonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesasadjadiNo ratings yet
- Vacuum Booster Control System Design and Fault Self-Check StrategiesDocument13 pagesVacuum Booster Control System Design and Fault Self-Check StrategiesGerald CastilloNo ratings yet
- Energies 15 00122 v3Document13 pagesEnergies 15 00122 v3Julius RojoNo ratings yet
- Energy-Optimal Control of Plug-In Hybrid Electric Vehicles For Real-World Driving CyclesDocument14 pagesEnergy-Optimal Control of Plug-In Hybrid Electric Vehicles For Real-World Driving CyclesAndreea StefanaNo ratings yet
- Driving Cycle Development Methods: Case Study in MalaysiaDocument9 pagesDriving Cycle Development Methods: Case Study in MalaysiaTELKOMNIKANo ratings yet
- Energies 15 07243 v3Document26 pagesEnergies 15 07243 v3Tran DanteNo ratings yet
- 1 s2.0 S2352146516302563 Main - 2Document10 pages1 s2.0 S2352146516302563 Main - 2BrahimNo ratings yet
- Modelling and Simulation of Electric and Hybrid Electric VehiclesDocument6 pagesModelling and Simulation of Electric and Hybrid Electric VehiclesYaz BentancourNo ratings yet
- Haul Truck Fuel Consumption - PublishedDocument6 pagesHaul Truck Fuel Consumption - PublishedAhmed IdiNo ratings yet
- Hybrid Cars - Solution To Ecological Challenges. Optimizing Maintenance Regimes For Hybrid VehiclesDocument6 pagesHybrid Cars - Solution To Ecological Challenges. Optimizing Maintenance Regimes For Hybrid VehiclesMelike ÇetinkayaNo ratings yet
- Summary Review on the Application of Computational Fluid Dynamics in Nuclear Power Plant DesignFrom EverandSummary Review on the Application of Computational Fluid Dynamics in Nuclear Power Plant DesignNo ratings yet
- Industry Overview: Marketing Issues in Automobile IndustryDocument29 pagesIndustry Overview: Marketing Issues in Automobile IndustryAbid IqbalNo ratings yet
- 161 Special AirportsDocument25 pages161 Special AirportsLucian Florin Zamfir100% (1)
- PosterDocument2 pagesPosterPiyush AwareNo ratings yet
- Travel Agency vs. Tour OperatorDocument6 pagesTravel Agency vs. Tour OperatorJean Zyrin AndaNo ratings yet
- Van Ambulance Specification: Engine & TransmissionDocument1 pageVan Ambulance Specification: Engine & TransmissionWilfredo Gabata SinoyNo ratings yet
- Sika Transportation-Rail BrochureDocument24 pagesSika Transportation-Rail BrochurepnagarajjNo ratings yet
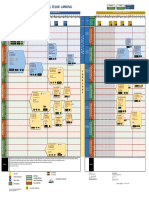
- Ship Berthing Plan Terminal Teluk Lamong: Ref Number: 150921 02Document1 pageShip Berthing Plan Terminal Teluk Lamong: Ref Number: 150921 02Aziz AbdulNo ratings yet
- LTO EXAM ReviewerDocument10 pagesLTO EXAM ReviewerSalvador Calimbayan Jr.100% (2)
- Shimano Rs10 WheelsetDocument1 pageShimano Rs10 Wheelsettareq.sefatNo ratings yet
- United States Patent: (12) (10) Patent No.: US 7,322,545 B2Document13 pagesUnited States Patent: (12) (10) Patent No.: US 7,322,545 B2rakkaNo ratings yet
- Emerging Trends in Infrastructure 2019Document28 pagesEmerging Trends in Infrastructure 2019Pedro MentadoNo ratings yet
- Delhi TicketDocument1 pageDelhi TicketSurendra BansodeNo ratings yet
- 18CEC303T Highway Engg and DesignDocument3 pages18CEC303T Highway Engg and DesignmekalaNo ratings yet
- " Air Suspension System ": Presented byDocument17 pages" Air Suspension System ": Presented bymonikaneha123No ratings yet
- Seam 213 Introduction and Heavy Lift CargoesDocument17 pagesSeam 213 Introduction and Heavy Lift CargoesKenneth SibonghanoyNo ratings yet
- 276-Task Appreciation (For RD 256) Loyang Delpot - 1311!27!1Document5 pages276-Task Appreciation (For RD 256) Loyang Delpot - 1311!27!1alfieNo ratings yet
- APA Format BibliographiesDocument2 pagesAPA Format BibliographiesJohn Lloyd JuanoNo ratings yet
- Cessna Aircraft Company: Wichita, KansasDocument127 pagesCessna Aircraft Company: Wichita, KansasFábio FariaNo ratings yet
- Flight PlanDocument93 pagesFlight PlanSorvetinho l SoaresNo ratings yet
- Illustrative Worked Examples: 222 - Vehicle Collision Loads On Supports of Bridges, Flyover Supports & Foot Over BridgesDocument2 pagesIllustrative Worked Examples: 222 - Vehicle Collision Loads On Supports of Bridges, Flyover Supports & Foot Over Bridgesjatin singlaNo ratings yet
- Vta 2035Document282 pagesVta 2035Chris ChiangNo ratings yet
- Passage Plan FormDocument4 pagesPassage Plan FormNovem NacarioNo ratings yet
- 2003 Peugeot 807 65093Document184 pages2003 Peugeot 807 65093Jenő Rádi100% (1)
- 6.3 Operation and Maintenance (O&M) PlanDocument185 pages6.3 Operation and Maintenance (O&M) PlanLIYANA SAMSUDINNo ratings yet
- HVMhub Crash Testing Standards ExplainedDocument19 pagesHVMhub Crash Testing Standards ExplainedhameedNo ratings yet
- ChassisDocument5 pagesChassisSapari VelNo ratings yet
- Radio Calls in The Traffic PatternDocument3 pagesRadio Calls in The Traffic PatternTatta CamposNo ratings yet