Download as pdf or txt
You might also like
- ASAL Physics Executive Preview - Digital PDFDocument83 pagesASAL Physics Executive Preview - Digital PDFAn Tran83% (6)
- Equilibrium of Concurrent Force SystemsDocument12 pagesEquilibrium of Concurrent Force SystemszeroecalbusNo ratings yet
- Pos Jaga ModelDocument1 pagePos Jaga ModelDibyo SetiawanNo ratings yet
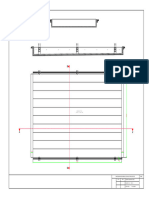
- Stage: R.C.C Slab (Thickness 150 MM) Railing (Thickness 75 MM)Document1 pageStage: R.C.C Slab (Thickness 150 MM) Railing (Thickness 75 MM)lokeshNo ratings yet
- Sandi Skb-Denah TowerDocument1 pageSandi Skb-Denah TowerVirtuous PongtengkoNo ratings yet
- In-Centre (I) (Refer To Figure 5, 6) : 2 Sin Sin Sin Sin Sin SinDocument1 pageIn-Centre (I) (Refer To Figure 5, 6) : 2 Sin Sin Sin Sin Sin SinTamil SelvanNo ratings yet
- Transformer Vector Groups v1Document8 pagesTransformer Vector Groups v1Man EbookNo ratings yet
- Mathematics Class 7 Chapter 1: Adding Angle: Basics You Need From 6 Standard Linear PairDocument2 pagesMathematics Class 7 Chapter 1: Adding Angle: Basics You Need From 6 Standard Linear Pairsubeesh upNo ratings yet
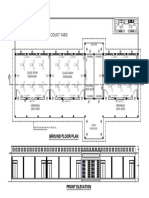
- Multi-Purpose Event Hall Outdoor Garden: Female C.R. Female C.RDocument1 pageMulti-Purpose Event Hall Outdoor Garden: Female C.R. Female C.Rvince de JesusNo ratings yet
- Swimming Pool ABCS-Model - PlanDocument1 pageSwimming Pool ABCS-Model - PlanrajdeepNo ratings yet
- Chapter 16 II Earth As A Sphere ENHANCEDocument27 pagesChapter 16 II Earth As A Sphere ENHANCEtee866150% (6)
- Example Weighing Weighing Assuming Negligible,: Fig. WeightDocument2 pagesExample Weighing Weighing Assuming Negligible,: Fig. WeightAnupEkboteNo ratings yet
- ME 214 Class Exercise Moment About A PointDocument9 pagesME 214 Class Exercise Moment About A PointMuhammad Usman Saifullah KhanNo ratings yet
- Three Phase Induction Motor - InstruDocument20 pagesThree Phase Induction Motor - InstruMohit IndurkarNo ratings yet
- Mark Footing: Beam StripDocument1 pageMark Footing: Beam StripphillobatonNo ratings yet
- Biwta Pilar Double Pile - 07.02.2019Document6 pagesBiwta Pilar Double Pile - 07.02.2019mehediNo ratings yet
- Denah Bangunan: Skala 1: 100Document3 pagesDenah Bangunan: Skala 1: 100dhody indrakusumaNo ratings yet
- School PlanDocument1 pageSchool Plansunlight architectNo ratings yet
- WebsonDocument1 pageWebsonhermitpassiNo ratings yet
- March 2016-ModelDocument1 pageMarch 2016-ModelhermitpassiNo ratings yet
- Force X, Y and Z at PH25:Pump H2Document1 pageForce X, Y and Z at PH25:Pump H2Ajay SatputeNo ratings yet
- Pier DrawingDocument1 pagePier DrawingMonjit GogoiNo ratings yet
- ABC Vs Acb Phase Seq t60 Get-8431bDocument3 pagesABC Vs Acb Phase Seq t60 Get-8431bkcirrenwodNo ratings yet
- 01 Cylinder ProblemDocument3 pages01 Cylinder Problemsahilrana904321No ratings yet
- 2 - Ga - Drawing PDFDocument1 page2 - Ga - Drawing PDFcadd puthurNo ratings yet
- Chapter 5. Torque and Rotational Equilibrium: Unit ConversionsDocument11 pagesChapter 5. Torque and Rotational Equilibrium: Unit Conversions507profesorNo ratings yet
- Chapter 5 Torque and Rotational EquilibriumDocument12 pagesChapter 5 Torque and Rotational Equilibriumson1cman100% (1)
- The First Quiz (110!11!03) IncompleteDocument3 pagesThe First Quiz (110!11!03) Incomplete陳科樺No ratings yet
- FB-77 Series (Spec)Document8 pagesFB-77 Series (Spec)tuanhnguyen2121990No ratings yet
- FramelessDocument1 pageFramelessSaptian HardiantoNo ratings yet
- Structure X-SectionDocument11 pagesStructure X-SectiondianNo ratings yet
- CatgoriationDocument7 pagesCatgoriationMonjur MorshedNo ratings yet
- Matematyka NotatkiDocument23 pagesMatematyka NotatkijulkabanatNo ratings yet
- Conference Room 1 Conference Room 2Document1 pageConference Room 1 Conference Room 2vince de JesusNo ratings yet
- SEIIDocument3 pagesSEIIMosquera AlexNo ratings yet
- Ut1 emDocument1 pageUt1 emSamuel WesleyNo ratings yet
- Grid at 3: PLT25 6400 ISMB300 ISLC (P) 200Document1 pageGrid at 3: PLT25 6400 ISMB300 ISLC (P) 200cadd puthurNo ratings yet
- Denah LT 2 Hotel-ModelfixDocument1 pageDenah LT 2 Hotel-ModelfixGzadeNo ratings yet
- Short Description of The Measurements With The Transistor Tester Version 1.11kDocument9 pagesShort Description of The Measurements With The Transistor Tester Version 1.11kJose Oscar ManriqueNo ratings yet
- Tower B TilesDocument2 pagesTower B Tilesjiasing LohNo ratings yet
- The Component Method of Vector Addition: Draw Each Vector, Then Find RDocument4 pagesThe Component Method of Vector Addition: Draw Each Vector, Then Find RDani DelgadoNo ratings yet
- Instructiuni de AsamblareDocument4 pagesInstructiuni de AsamblareMarkoLuigiNo ratings yet
- 1 - Ga - DrawingDocument1 page1 - Ga - Drawingcadd puthurNo ratings yet
- Lecture 04 Shear and Bending Moment Diagram of BeamsDocument10 pagesLecture 04 Shear and Bending Moment Diagram of Beamsdermha LuigiNo ratings yet
- Chapter 4. Translational Equilibrium and Friction.: Free-Body DiagramsDocument15 pagesChapter 4. Translational Equilibrium and Friction.: Free-Body DiagramsFernando LópezNo ratings yet
- Chapter 4. Translational Equilibrium and FrictionDocument15 pagesChapter 4. Translational Equilibrium and FrictionMarites DalinocNo ratings yet
- A2) Model - PDF 4Document1 pageA2) Model - PDF 4bps.yadavNo ratings yet
- Residual Capacities EXV 14-20 03Document7 pagesResidual Capacities EXV 14-20 03adilaitlhajallaNo ratings yet
- ChartDocument1 pageChartAhmad MostafaNo ratings yet
- Trakaletal.2013 Model-4Document4 pagesTrakaletal.2013 Model-4fa fabmNo ratings yet
- 05 Es202Document6 pages05 Es202Moguri OwowNo ratings yet
- 21001-Dy Mausoleum DD Set1Document8 pages21001-Dy Mausoleum DD Set1JizzusNo ratings yet
- Plate No 25 Modular Kitchen Floor Plan: Kitchen 5000Mmx4000Mm Kitchen 5000Mmx4000MmDocument6 pagesPlate No 25 Modular Kitchen Floor Plan: Kitchen 5000Mmx4000Mm Kitchen 5000Mmx4000MmPavithra ValluvanNo ratings yet
- DHL CASE Exhibit-4Document3 pagesDHL CASE Exhibit-4Nidhi TiwariNo ratings yet
- კონსტრუქციებიDocument24 pagesკონსტრუქციებიLevani falelashviliNo ratings yet
- 1843Document14 pages1843ian jheferNo ratings yet
- Chapter 2 - Part 3 - Electric Potential - PHYS 331Document45 pagesChapter 2 - Part 3 - Electric Potential - PHYS 331Taukeer KhanNo ratings yet
- Case Study Questions Class 11 Physics - Laws of MotionDocument9 pagesCase Study Questions Class 11 Physics - Laws of MotionRavinder KumarNo ratings yet
- MomentumDocument9 pagesMomentumYAD912No ratings yet
- CH 23 Questions With AnswersDocument4 pagesCH 23 Questions With AnswersSaeed AzarNo ratings yet
- A2 MECH Momentum QuestionsDocument8 pagesA2 MECH Momentum Questionsfootball_frenzy_2004No ratings yet
- Holt Physics Ch. 5 Power PointDocument53 pagesHolt Physics Ch. 5 Power PointPastel PepeNo ratings yet
- Practice: Force Arrows: QuestionsDocument2 pagesPractice: Force Arrows: QuestionssigiryaNo ratings yet
- Pre-Final Examination in General Physics 1, 12 Grade "On All My Work, My Name Affirms My Honor"Document2 pagesPre-Final Examination in General Physics 1, 12 Grade "On All My Work, My Name Affirms My Honor"Oliver VillanuevaNo ratings yet
- Uniform Circular MotionDocument11 pagesUniform Circular MotionAnne Margaret AlmedaNo ratings yet
- Chapter 20: Electromagnetic InductionDocument30 pagesChapter 20: Electromagnetic InductionAmal Al RokenNo ratings yet
- Exercises: 4.1 Motion Is RelativeDocument4 pagesExercises: 4.1 Motion Is RelativeamilcarsoaresNo ratings yet
- SBT WpeDocument19 pagesSBT WpeALI RIZVINo ratings yet
- Current, Electricity and Its EffectDocument71 pagesCurrent, Electricity and Its EffectParminder singh parmarNo ratings yet
- Electrical Analogies of Mechanical SystemsDocument5 pagesElectrical Analogies of Mechanical SystemsJohn Manuel BautistaNo ratings yet
- AP Physics Motion & Force DynamicsDocument12 pagesAP Physics Motion & Force DynamicspuvalaiNo ratings yet
- Answers To Saqs: Cambridge International A Level PhysicsDocument2 pagesAnswers To Saqs: Cambridge International A Level PhysicsharshanauocNo ratings yet
- Circular Motion: Linear Vs Rotational SpeedDocument23 pagesCircular Motion: Linear Vs Rotational SpeedathenalavegaNo ratings yet
- Turning Effects of Forces PDFDocument6 pagesTurning Effects of Forces PDFMazharul SamiNo ratings yet
- P6 NotesDocument12 pagesP6 NotesMay AuditorNo ratings yet
- Dynamic Analysis of Linkage MechanismDocument6 pagesDynamic Analysis of Linkage MechanismAttila BartiNo ratings yet
- Grade 11 Physical Science Midterm ExamDocument2 pagesGrade 11 Physical Science Midterm ExamHendrix Antonni Amante83% (6)
- WORK-POWER-ENERGY - Solved ProblemsDocument6 pagesWORK-POWER-ENERGY - Solved ProblemsZain Ul AbidinNo ratings yet
- Relative Equilibrium of LiquidsDocument8 pagesRelative Equilibrium of LiquidsAngeloLorenzoSalvadorTamayoNo ratings yet
- Course Content Rtl2Document7 pagesCourse Content Rtl2Sathish JayaprakashNo ratings yet
- Lesson 5 (Forces and Netwons Laws)Document73 pagesLesson 5 (Forces and Netwons Laws)Francis Perito50% (2)
- Namma Kalvi 11th Physics Public Exam 2020 Answer Key em 218062Document15 pagesNamma Kalvi 11th Physics Public Exam 2020 Answer Key em 218062Silva scary svNo ratings yet
- Takrifan Konsep Dan Hukum Fizik: Atau AtauDocument4 pagesTakrifan Konsep Dan Hukum Fizik: Atau AtauAdnan ShamsudinNo ratings yet
- NCERT Solutions For Class 12 Physics Chapter 1 Electric Charges and FieldsDocument28 pagesNCERT Solutions For Class 12 Physics Chapter 1 Electric Charges and FieldsYash Pratap SinghNo ratings yet