Download as pdf or txt
You might also like
- EE Correlation 1 PDFDocument111 pagesEE Correlation 1 PDFElenne Mendoza Mortel EvoraNo ratings yet
- Santiago Calle LawsuitDocument7 pagesSantiago Calle LawsuitNeil StreetNo ratings yet
- PayU - Sales DeckDocument27 pagesPayU - Sales DeckaNANTNo ratings yet
- Robot KinematicDocument60 pagesRobot KinematicAnonymous ZB6qyhD6No ratings yet
- L2-Degree of FreedomDocument14 pagesL2-Degree of FreedomBenjamin MabuteNo ratings yet
- Kinamatic FundamentalsDocument49 pagesKinamatic FundamentalsFaisal IrfanNo ratings yet
- MATLAB: Introduction Part 2 - Assignment: Problem 1Document3 pagesMATLAB: Introduction Part 2 - Assignment: Problem 1Hafid AlwanNo ratings yet
- 20210703-La & NM - Cse, It, Aiml, DS, Iot, Cyber SecurityDocument580 pages20210703-La & NM - Cse, It, Aiml, DS, Iot, Cyber SecurityKapil KhairwallNo ratings yet
- TP3 2Document2 pagesTP3 2tcrmgf2wfo7pcuxkvoNo ratings yet
- Trans 2D-2Document13 pagesTrans 2D-2faizanNo ratings yet
- Number Synthesis of MechanismsDocument15 pagesNumber Synthesis of MechanismsICYNTERNo ratings yet
- IB Math HL NotesDocument19 pagesIB Math HL NotesDevbrat Hariyani100% (2)
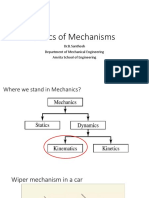
- Basics of Mechanisms: Dr.B.Santhosh Department of Mechanical Engineering Amrita School of EngineeringDocument34 pagesBasics of Mechanisms: Dr.B.Santhosh Department of Mechanical Engineering Amrita School of Engineeringkishore sNo ratings yet
- 4 Direct Numerical Integration Methods: HapterDocument62 pages4 Direct Numerical Integration Methods: HapterLionel TebonNo ratings yet
- IIT JEE 2008 Paper 2 Solutions by FIITJEEDocument26 pagesIIT JEE 2008 Paper 2 Solutions by FIITJEEAbhinav83% (6)
- LognotesDocument18 pagesLognotesnavi_khiNo ratings yet
- Gen. Tribonacci Like Polynomials PDFDocument10 pagesGen. Tribonacci Like Polynomials PDFmansizaveriNo ratings yet
- TM Lecture 1 PDFDocument12 pagesTM Lecture 1 PDFMohammed QuthahNo ratings yet
- IntrodutionDocument34 pagesIntrodutionaymaneNo ratings yet
- Numerical Analysis: (MA214) : Instructor: Prof. Tony J. PuthenpurakalDocument32 pagesNumerical Analysis: (MA214) : Instructor: Prof. Tony J. PuthenpurakalRitwik KaduNo ratings yet
- CP3 Notes - Toby AdkinsDocument57 pagesCP3 Notes - Toby AdkinsJames ConnaughtonNo ratings yet
- Poster PT Symmetry Breaking PhysicsDocument30 pagesPoster PT Symmetry Breaking PhysicsHimadri BarmanNo ratings yet
- Final Study GuideDocument10 pagesFinal Study GuideNaveenTummidiNo ratings yet
- L1 CSC431-OyeladeOJDocument142 pagesL1 CSC431-OyeladeOJchukwukaukanduNo ratings yet
- Chapter 10 Test April 8, 2004 No Calculators NameDocument4 pagesChapter 10 Test April 8, 2004 No Calculators NameeperlaNo ratings yet
- Introduction To Density Functional TheoryDocument44 pagesIntroduction To Density Functional TheoryTin NguyenNo ratings yet
- Notas Utiles HomotopiaDocument21 pagesNotas Utiles HomotopiaHoracioCastellanosMuñoaNo ratings yet
- Module 1 3Document17 pagesModule 1 3geromelerio.211No ratings yet
- LogarithimsDocument9 pagesLogarithimsBoitumelo MatjeleNo ratings yet
- Class 11-10-Straight Lines - SolDocument8 pagesClass 11-10-Straight Lines - SolAnanya JNo ratings yet
- International Journal of Applied Mathematics (ISSN 1311-1728) Volume 25, Issue 1 (2012), 1 15 Edition: Proofread Version (Page-Numbers May Vary!)Document16 pagesInternational Journal of Applied Mathematics (ISSN 1311-1728) Volume 25, Issue 1 (2012), 1 15 Edition: Proofread Version (Page-Numbers May Vary!)Marco CamposNo ratings yet
- Phần 2: mô phỏng máy tính: Instructor: Hoang Ngoc Ha Email: Bộ môn QT&TBDocument46 pagesPhần 2: mô phỏng máy tính: Instructor: Hoang Ngoc Ha Email: Bộ môn QT&TBNguyễn Bảo NguyênNo ratings yet
- 307 Ode Notes 2020 2021Document148 pages307 Ode Notes 2020 2021Sam BolduanNo ratings yet
- Pure Mathematics I B by Rao W.ODocument75 pagesPure Mathematics I B by Rao W.OBetty Njeri MbuguaNo ratings yet
- Math 332: Gröbner BasesDocument26 pagesMath 332: Gröbner BasesmenloparkNo ratings yet
- Math 2280 - Final Exam: University of Utah Fall 2013Document20 pagesMath 2280 - Final Exam: University of Utah Fall 2013Abdesselem BoulkrouneNo ratings yet
- Minor Test-01 23 April QPDocument17 pagesMinor Test-01 23 April QPDr. Pradeep SakeNo ratings yet
- MA 542 (2018) - Lec-8Document16 pagesMA 542 (2018) - Lec-8Vikas RajpootNo ratings yet
- Lobatto MethodsDocument17 pagesLobatto MethodsPJNo ratings yet
- TUT7Document4 pagesTUT7yasya bahrul ulumNo ratings yet
- Math AssignmentDocument1 pageMath Assignmentmonkeydluffy0505kaizokuNo ratings yet
- Lecture08 - Numerical DifferentiationDocument29 pagesLecture08 - Numerical DifferentiationNa2ryNo ratings yet
- Note of ODEDocument133 pagesNote of ODEbabycatkimNo ratings yet
- L2C12 - Complex FunctionsDocument97 pagesL2C12 - Complex FunctionsKhánh Huyền TrầnNo ratings yet
- Fixed Point Theorems in Metric Spaces: Petko D. ProinovDocument12 pagesFixed Point Theorems in Metric Spaces: Petko D. ProinovMaher Ali NawkhassNo ratings yet
- Shna AbdulkarimDocument17 pagesShna AbdulkarimBrwa HamasaeedNo ratings yet
- DR Tasos Avgoustidis: Lecture 5: Interacting FieldsDocument16 pagesDR Tasos Avgoustidis: Lecture 5: Interacting Fieldscifarha venantNo ratings yet
- Teoria Mates NSDocument19 pagesTeoria Mates NSnicolasNo ratings yet
- SimilarityDocument25 pagesSimilarityKhaled TarekNo ratings yet
- Method of MomentsDocument25 pagesMethod of Momentsothmanem449No ratings yet
- Problem40 34Document1 pageProblem40 34IENCSNo ratings yet
- Computer Vision Section 6-4CSDocument5 pagesComputer Vision Section 6-4CSmedo.tarek1122No ratings yet
- Discongency Hamiltonian SystemsDocument153 pagesDiscongency Hamiltonian SystemsRicardo TapiaNo ratings yet
- Maths Syllabus New IMA Bhubaneswar TifrDocument4 pagesMaths Syllabus New IMA Bhubaneswar TifrPritesh SinghNo ratings yet
- Chapter 3 Cyclic Codes V1Document23 pagesChapter 3 Cyclic Codes V1JoeybirlemNo ratings yet
- Molecular GeometryDocument21 pagesMolecular GeometryCacey Daiwey CalixtoNo ratings yet
- Solid State Physics NotesDocument15 pagesSolid State Physics NotesSebastian YdeNo ratings yet
- EC381 Lecture6 PDFDocument24 pagesEC381 Lecture6 PDFCorazon corazonNo ratings yet
- List of FormulaeDocument4 pagesList of FormulaeMohamed TahmeedNo ratings yet
- Calculus 1 Ee1Document27 pagesCalculus 1 Ee1Usep Engr BisligNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)From EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No ratings yet
- MGT 101 Introduction To Management Caryl Andrea A. Tinae Group No. 2 Groups and Teams October 30, 2015Document2 pagesMGT 101 Introduction To Management Caryl Andrea A. Tinae Group No. 2 Groups and Teams October 30, 2015meriiNo ratings yet
- Introduction To Hadith by DR Rafiq AhmadDocument54 pagesIntroduction To Hadith by DR Rafiq AhmadtakwaniaNo ratings yet
- Shaikh Zain Ul Aqtab SiddiqDocument4 pagesShaikh Zain Ul Aqtab SiddiqMohammed Abdul Hafeez, B.Com., Hyderabad, IndiaNo ratings yet
- Board ResolutionDocument6 pagesBoard ResolutionAntonio GanubNo ratings yet
- Fidelity Absolute Return Global Equity Fund PresentationDocument51 pagesFidelity Absolute Return Global Equity Fund Presentationpietro silvestriNo ratings yet
- Powerful Utility Tractors: Model: 2605-4R 2615-2R 2615-4R 2625-2R 2625-4R 2635-2R 2635-4RDocument2 pagesPowerful Utility Tractors: Model: 2605-4R 2615-2R 2615-4R 2625-2R 2625-4R 2635-2R 2635-4RKilluaR32No ratings yet
- English Work - Maria Isabel GrajalesDocument5 pagesEnglish Work - Maria Isabel GrajalesDavid RodriguezNo ratings yet
- GT Gold Corp.: Release Date: 25 June 2020Document12 pagesGT Gold Corp.: Release Date: 25 June 2020anon analyticsNo ratings yet
- Pen Pal Application Form - First PhaseDocument6 pagesPen Pal Application Form - First PhaseLeiidy GomezNo ratings yet
- 195 Santos v. NorthwestDocument4 pages195 Santos v. NorthwestAnn Julienne AristozaNo ratings yet
- (Limpin, Shakti Dev) Mil Q4W1Document3 pages(Limpin, Shakti Dev) Mil Q4W1Shakti Dev LimpinNo ratings yet
- Ob-Gyn Quiz 4Document11 pagesOb-Gyn Quiz 4Ndor BariboloNo ratings yet
- GWL Code of Conduct enDocument18 pagesGWL Code of Conduct enKristian GjoniNo ratings yet
- Steegmuller - Flaubert and Madame Bovary - A Double Portrait-Houghton Mifflin Harcourt (1977)Document378 pagesSteegmuller - Flaubert and Madame Bovary - A Double Portrait-Houghton Mifflin Harcourt (1977)Jorge Uribe100% (2)
- Chris McClure's Origami BatDocument6 pagesChris McClure's Origami Batchristopher.t.mcclureNo ratings yet
- Ajit ResumeDocument3 pagesAjit ResumeSreeluNo ratings yet
- Ipi425812 PDFDocument5 pagesIpi425812 PDFshelfinararaNo ratings yet
- Spheres of Might 5eDocument144 pagesSpheres of Might 5eSlava Granlund100% (1)
- Universiti Tunku Abdul Rahman: UEME1323 StaticsDocument26 pagesUniversiti Tunku Abdul Rahman: UEME1323 StaticsshintanNo ratings yet
- Death and The AfterlifeDocument2 pagesDeath and The AfterlifeAdityaNandanNo ratings yet
- Tesla Manufacturing Plant in Canada AnnouncementDocument1 pageTesla Manufacturing Plant in Canada AnnouncementMaria MeranoNo ratings yet
- Bicilavadora-Ideas05 PedlingDocument11 pagesBicilavadora-Ideas05 PedlingAnonymous GEHeEQlajbNo ratings yet
- Data Analytics For Accounting 1st Edition Richardson Solutions ManualDocument25 pagesData Analytics For Accounting 1st Edition Richardson Solutions ManualRhondaHogancank100% (51)
- Hard TimesDocument3 pagesHard TimesPaola LamannaNo ratings yet
- Root Cause Valid For Reason CodeDocument2 pagesRoot Cause Valid For Reason CodenagasapNo ratings yet
- Microbiology Research ProposalDocument20 pagesMicrobiology Research ProposalSalman KhanNo ratings yet
- Police Log July 17, 2016Document13 pagesPolice Log July 17, 2016MansfieldMAPoliceNo ratings yet
- The Giant and The RockDocument6 pagesThe Giant and The RockVangie SalvacionNo ratings yet