Download as pdf or txt
You might also like
- W. Keith Nicholson-Introduction To Abstract Algebra, Solutions Manual-Wiley (2012)Document497 pagesW. Keith Nicholson-Introduction To Abstract Algebra, Solutions Manual-Wiley (2012)Marcus Vinicius Sousa Sousa100% (1)
- SCRIPT Christmas PartyDocument3 pagesSCRIPT Christmas PartyRaffy Bello67% (6)
- How To Use TruTops PFODocument47 pagesHow To Use TruTops PFORigoberto GONZALEZ SUAREZ100% (1)
- Theoretical Statistics and Asymptotics: Nancy ReidDocument13 pagesTheoretical Statistics and Asymptotics: Nancy ReidYojan SarkarNo ratings yet
- Support Vector Machines: Theory and Applications: January 2001Document7 pagesSupport Vector Machines: Theory and Applications: January 2001Prince GurajenaNo ratings yet
- Models Beyond The DPDocument47 pagesModels Beyond The DPLucia FilippozziNo ratings yet
- Fractal Analysis and Tumor GrowthDocument14 pagesFractal Analysis and Tumor GrowthDidima ToalaNo ratings yet
- Pers Hom SurveyDocument26 pagesPers Hom SurveySlabe JubopNo ratings yet
- Paper For Filter DesignDocument29 pagesPaper For Filter DesignAnubhav Classes BhilaiNo ratings yet
- Algorithms 17 00123Document12 pagesAlgorithms 17 00123jamel-shamsNo ratings yet
- Ahrens - Et - Al - A Theory-Based Lasso For Time-Series DataDocument35 pagesAhrens - Et - Al - A Theory-Based Lasso For Time-Series DataJoão VíctorNo ratings yet
- Addcomb Sigact TrevisanDocument18 pagesAddcomb Sigact TrevisanRousseauNo ratings yet
- Bretto 2013Document6 pagesBretto 2013naacc5ssmietNo ratings yet
- Maximum Likelihood Estimation and Inference On Cointegration Applications To The Demand For MoneyDocument42 pagesMaximum Likelihood Estimation and Inference On Cointegration Applications To The Demand For MoneyzedNo ratings yet
- Application of Derivatives ThesisDocument10 pagesApplication of Derivatives ThesisSudip Rokaya100% (4)
- Generalized Real Analysis and Its Applications: Endre PapDocument19 pagesGeneralized Real Analysis and Its Applications: Endre Papjibabhai9No ratings yet
- Accessible Single-Valued Neutrosophic GraphsDocument26 pagesAccessible Single-Valued Neutrosophic GraphsMia AmaliaNo ratings yet
- A Decade of Application of The Choquet and Sugeno Integrals in Multi-Criteria Decision AidDocument40 pagesA Decade of Application of The Choquet and Sugeno Integrals in Multi-Criteria Decision Aidsilv_phNo ratings yet
- (Mathematics of Data, 1) Hal Schenck - Algebraic Foundations For Applied Topology and Data Analysis-Springer (2022)Document231 pages(Mathematics of Data, 1) Hal Schenck - Algebraic Foundations For Applied Topology and Data Analysis-Springer (2022)Richard Gabriel - ExatasNo ratings yet
- Homotopy Analysis Method For NonlinearDocument6 pagesHomotopy Analysis Method For NonlinearMohd Rosli A. HamidNo ratings yet
- Numerical Algebra, Control and Optimization: Doi:10.3934/naco.2021045Document36 pagesNumerical Algebra, Control and Optimization: Doi:10.3934/naco.2021045Métodos NuméricosNo ratings yet
- Journal of Multivariate Analysis: F. Ferraty, I. Van Keilegom, P. VieuDocument19 pagesJournal of Multivariate Analysis: F. Ferraty, I. Van Keilegom, P. VieuHamza DhakerNo ratings yet
- Hong 2011Document19 pagesHong 2011Sanket TikareNo ratings yet
- TransG A Generative Model For Knowledge Graph EmbeDocument11 pagesTransG A Generative Model For Knowledge Graph EmbeCristian CiocoiuNo ratings yet
- Accessible Single-Valued Neutrosophic GraphsDocument26 pagesAccessible Single-Valued Neutrosophic GraphsMia AmaliaNo ratings yet
- Lectures On Sieve MethodsDocument216 pagesLectures On Sieve MethodslunwenNo ratings yet
- Symmetry: Inversion of Tridiagonal Matrices Using The Dunford-Taylor's IntegralDocument9 pagesSymmetry: Inversion of Tridiagonal Matrices Using The Dunford-Taylor's Integralarshiya tajNo ratings yet
- Robust Linear ClusteringDocument18 pagesRobust Linear Clusteringtani2779No ratings yet
- Tadmor BAMS v49-2012Document48 pagesTadmor BAMS v49-2012itsspraveen4uNo ratings yet
- Full Discretization of Wave Equation: Boundary Value Problems December 2015Document12 pagesFull Discretization of Wave Equation: Boundary Value Problems December 2015Mihaela SavinNo ratings yet
- We 9223Document45 pagesWe 9223RAJ MISHRA RAJ MISHRANo ratings yet
- B.sc. (Hons) Mathmetics Laplace TrnsformsDocument50 pagesB.sc. (Hons) Mathmetics Laplace Trnsformskapil sharmaNo ratings yet
- On Nabla Conformable Fractional Hardy-Type Inequalities On Arbitrary Time ScalesDocument23 pagesOn Nabla Conformable Fractional Hardy-Type Inequalities On Arbitrary Time ScalesCarlos TavaresNo ratings yet
- Applications of Graph Theory - MainDocument22 pagesApplications of Graph Theory - MainASNo ratings yet
- TodiniDocument16 pagesTodiniEdwin Aranda SaldañaNo ratings yet
- Total Domination Books PDFDocument184 pagesTotal Domination Books PDFGuru Viswanathan75% (4)
- Hierarchical Archimedean Copulas For Matlab and Octave: The Hacopula ToolboxDocument36 pagesHierarchical Archimedean Copulas For Matlab and Octave: The Hacopula ToolboxHandoyoNo ratings yet
- Hypergraphs: Connection and Separation: M. Amin Bahmanian and Mateja Sajna University of Ottawa May 29, 2015Document31 pagesHypergraphs: Connection and Separation: M. Amin Bahmanian and Mateja Sajna University of Ottawa May 29, 2015Alamelu LakshmananNo ratings yet
- A Maple Package of Automated Derivation of Homotopy Analysis Solution For Periodic Nonlinear OscillationsDocument24 pagesA Maple Package of Automated Derivation of Homotopy Analysis Solution For Periodic Nonlinear OscillationsMohammad RoshaniNo ratings yet
- Closed-Form Expressions For The Finite DifferenceDocument17 pagesClosed-Form Expressions For The Finite DifferenceRMolina65No ratings yet
- Efficient Third-Order Dependency Parsers Terry Koo and Michael CollinsDocument11 pagesEfficient Third-Order Dependency Parsers Terry Koo and Michael CollinsRepositorioNo ratings yet
- VariogramsDocument20 pagesVariogramsBuiNgocHieu92% (13)
- Introduction to Geostatistics and VariogDocument20 pagesIntroduction to Geostatistics and VariogI Nyoman SutyawanNo ratings yet
- SandwichDocument21 pagesSandwichPoubelleNo ratings yet
- Operator Means and Applications: July 2012Document27 pagesOperator Means and Applications: July 2012team dcsNo ratings yet
- Additive Combinatorics - TrevisanDocument18 pagesAdditive Combinatorics - TrevisanwobbythewabbitNo ratings yet
- Algebraic Signal Processing Theory: Cooley-Tukey Type Algorithms For Dcts and DstsDocument20 pagesAlgebraic Signal Processing Theory: Cooley-Tukey Type Algorithms For Dcts and DstsmuhamadkamalaminNo ratings yet
- Data Mining1Document3 pagesData Mining1Nurul NadirahNo ratings yet
- Applied Sciences: Hesitant Fuzzy Linguistic Term and TOPSIS To Assess Lean PerformanceDocument13 pagesApplied Sciences: Hesitant Fuzzy Linguistic Term and TOPSIS To Assess Lean PerformancejvanandhNo ratings yet
- Handbook of Research On Machine Learning Applications and TrendsDocument34 pagesHandbook of Research On Machine Learning Applications and TrendsAbdelkrim KefifNo ratings yet
- Wavelet Thesis DTUDocument247 pagesWavelet Thesis DTU202321005No ratings yet
- Estimators For Long Range Dependence: An Empirical StudyDocument14 pagesEstimators For Long Range Dependence: An Empirical StudyperrazossNo ratings yet
- Romance 2011Document7 pagesRomance 2011Araceli Enríquez OvandoNo ratings yet
- Controlled and Conditioned in Variants in Linear Systems TheoryDocument460 pagesControlled and Conditioned in Variants in Linear Systems Theorym_bazrafkanNo ratings yet
- Physica A: R. PincakDocument13 pagesPhysica A: R. PincakKhairulNo ratings yet
- Tao T. Higher Order Fourier Analysis (Draft, 2011) (233s) - MTDocument233 pagesTao T. Higher Order Fourier Analysis (Draft, 2011) (233s) - MTEstefanía Martínez100% (1)
- Low Polynomial Exclusion of Planar Graph Patterns: Jean-Florent Raymond and Dimitrios M. ThilikosDocument19 pagesLow Polynomial Exclusion of Planar Graph Patterns: Jean-Florent Raymond and Dimitrios M. ThilikosElías ReyesNo ratings yet
- Textbook Generalized Multiresolution Analyses Kathy D Merrill Ebook All Chapter PDFDocument53 pagesTextbook Generalized Multiresolution Analyses Kathy D Merrill Ebook All Chapter PDFbobby.brown419100% (14)
- Computational Aspects of Modular Forms and Galois Representations: How One Can Compute in Polynomial Time the Value of Ramanujan's Tau at a Prime (AM-176)From EverandComputational Aspects of Modular Forms and Galois Representations: How One Can Compute in Polynomial Time the Value of Ramanujan's Tau at a Prime (AM-176)No ratings yet
- Hough Transform: Unveiling the Magic of Hough Transform in Computer VisionFrom EverandHough Transform: Unveiling the Magic of Hough Transform in Computer VisionNo ratings yet
- Courses of InterestDocument2 pagesCourses of InterestPramesh KumarNo ratings yet
- Nested Logit ModelsDocument3 pagesNested Logit ModelsPramesh KumarNo ratings yet
- Going Green: The Effect of Green Labels On Delivery Time Slot ChoicesDocument41 pagesGoing Green: The Effect of Green Labels On Delivery Time Slot ChoicesPramesh KumarNo ratings yet
- Profile Likelihood MethodDocument21 pagesProfile Likelihood MethodPramesh KumarNo ratings yet
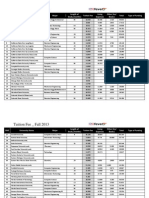
- Tuition Fee 2013Document10 pagesTuition Fee 2013Pramesh KumarNo ratings yet
- Personal QuestionsDocument2 pagesPersonal QuestionsPramesh KumarNo ratings yet
- Indian Standard: Code of Practice For Design and Construction of Raft FoundationsDocument3 pagesIndian Standard: Code of Practice For Design and Construction of Raft FoundationsPramesh KumarNo ratings yet
- Gauss Quadrature IntegrationDocument30 pagesGauss Quadrature IntegrationPramesh Kumar100% (1)
- ManualDocument149 pagesManualPramesh KumarNo ratings yet
- How Time Table WorksDocument1 pageHow Time Table WorksPramesh KumarNo ratings yet
- Drag LinesDocument31 pagesDrag LinesJonas GondimNo ratings yet
- ATTENTION:All UG/PG/Ph.D. Students: R24.7 Self-Study CourseDocument1 pageATTENTION:All UG/PG/Ph.D. Students: R24.7 Self-Study CoursePramesh KumarNo ratings yet
- E Bill Desk ActionDocument1 pageE Bill Desk ActionPramesh KumarNo ratings yet
- Azure Stack Operator Azs 2301Document1,506 pagesAzure Stack Operator Azs 2301Pt BuddhakirdNo ratings yet
- Business Analyst - JDDocument2 pagesBusiness Analyst - JDzeeshanNo ratings yet
- The Right To Privacy in The Philippines: Stakeholder Report Universal Periodic Review 27 Session - PhilippinesDocument11 pagesThe Right To Privacy in The Philippines: Stakeholder Report Universal Periodic Review 27 Session - PhilippinesJan. ReyNo ratings yet
- Free CV Templates CssDocument5 pagesFree CV Templates Cssfygemiduwef2100% (1)
- Auxiliary Heater (AHE) Diagnosis, Basic KnowledgeDocument1 pageAuxiliary Heater (AHE) Diagnosis, Basic Knowledgeمحمد يونسNo ratings yet
- Proforma Invoice - Titan Ger - 500Document1 pageProforma Invoice - Titan Ger - 500Mudalib HersiNo ratings yet
- Back Up Your Files To The Cloud PDFDocument1 pageBack Up Your Files To The Cloud PDFjayNo ratings yet
- Thuật toán brenhamDocument10 pagesThuật toán brenhamThanh MinhNo ratings yet
- Ultrasonic Guided Wave Damage Localization in Hole-Structural Bearing Crossbeam Based On Improved RAPID AlgorithmDocument13 pagesUltrasonic Guided Wave Damage Localization in Hole-Structural Bearing Crossbeam Based On Improved RAPID AlgorithmGuillermo AzuaraNo ratings yet
- 2.9 - Control of Customers Properties - BDocument4 pages2.9 - Control of Customers Properties - BUnachukwu SopuluNo ratings yet
- Oracle® Hyperion Strategic Finance: ReadmeDocument10 pagesOracle® Hyperion Strategic Finance: ReadmemanliomarxNo ratings yet
- SCI Job Application - CleanerDocument3 pagesSCI Job Application - CleanerShujauddin SultaniNo ratings yet
- Chery Tiggo7 Electronics Guide VAJUSWUDocument84 pagesChery Tiggo7 Electronics Guide VAJUSWUamin mombiniNo ratings yet
- DTE MPDocument17 pagesDTE MPHarsh tandelNo ratings yet
- Formateo de DUW para Carga de DiscosDocument3 pagesFormateo de DUW para Carga de DiscosTHE jerexd777No ratings yet
- Сервис Мануал На Английском Samsung Ua32eh500r Шасси u73aDocument173 pagesСервис Мануал На Английском Samsung Ua32eh500r Шасси u73aiuri63No ratings yet
- Shibiru TilahunDocument103 pagesShibiru TilahunaminlarghNo ratings yet
- ISO 10005 2005 Quality Management Systems - Guidelines For Quality PlansDocument30 pagesISO 10005 2005 Quality Management Systems - Guidelines For Quality PlansTaniaTapiaNo ratings yet
- Who Wants To Be A Millionaire Blank Game Template For FreeDocument7 pagesWho Wants To Be A Millionaire Blank Game Template For FreeThea CabalonaNo ratings yet
- Solution Manual For Guide To SQL 9Th Edition Pratt 111152727X 9781111527273 Full Chapter PDFDocument25 pagesSolution Manual For Guide To SQL 9Th Edition Pratt 111152727X 9781111527273 Full Chapter PDFnicole.anderson275100% (11)
- Computer History HandoutDocument3 pagesComputer History HandoutMary Jane Climaco GamoseNo ratings yet
- Reverse PresentationDocument13 pagesReverse PresentationYogendra SinghNo ratings yet
- F23 CST8804-IntroDocument22 pagesF23 CST8804-IntroReham BakounyNo ratings yet
- Photo House PO-1Document13 pagesPhoto House PO-1kris74karkiNo ratings yet
- Elementary Workbook Unit 9 R&WDocument25 pagesElementary Workbook Unit 9 R&WakodiemkieuNo ratings yet
- LQ1 Ab StructuresDocument75 pagesLQ1 Ab Structuresangelicamariz.tanNo ratings yet
- Full Test Bank For Advertising Promotion and Other Aspects of Integrated Marketing Communications 8Th Edition by Shimp PDF Docx Full Chapter ChapterDocument21 pagesFull Test Bank For Advertising Promotion and Other Aspects of Integrated Marketing Communications 8Th Edition by Shimp PDF Docx Full Chapter Chapterjosephpetersonjaczgqxdsw100% (15)
- WAU 100 Installation Instructions 4189350084 UKDocument10 pagesWAU 100 Installation Instructions 4189350084 UKЮрий ЛобановNo ratings yet