
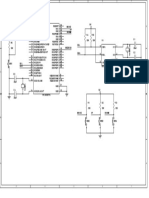
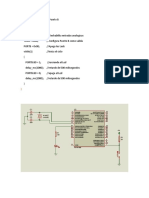
Gambarlah Dengan Menggunakan Proteus Skema Di Bawah Ini:: Pengendali Motor DC
Gambarlah Dengan Menggunakan Proteus Skema Di Bawah Ini:: Pengendali Motor DC
You might also like
- Exercises To Get Prepared For The Final ExamDocument29 pagesExercises To Get Prepared For The Final ExamGöksun NejatNo ratings yet
- Proteus LEDDocument3 pagesProteus LEDMuhammad Zikri AbdillahNo ratings yet
- Skematik DSNDocument1 pageSkematik DSNAsrul YanuarNo ratings yet
- Minimum System Atmega8 H-Bridge Motor Driver: Putar Kanan Putar KiriDocument1 pageMinimum System Atmega8 H-Bridge Motor Driver: Putar Kanan Putar KiriJeAmmy BelajarSabarrNo ratings yet
- Transformer Voltage Regulator Rectifier Input C3 C1Document1 pageTransformer Voltage Regulator Rectifier Input C3 C1Waqas AhmadNo ratings yet
- Incubadora de Transporte Itr-2S: CPU 3 A4Document1 pageIncubadora de Transporte Itr-2S: CPU 3 A4CamilaNo ratings yet
- Drill 2.0 Basic I-O Switching TheoryDocument13 pagesDrill 2.0 Basic I-O Switching TheoryDuaneNo ratings yet
- EEE373LLAB Group10Document5 pagesEEE373LLAB Group10Motasim FaiyazNo ratings yet
- Final Exam Topic 6 - Example Questions - SPIDocument4 pagesFinal Exam Topic 6 - Example Questions - SPITiến ThànhNo ratings yet
- CKT DiagramDocument1 pageCKT Diagramelisario JoseNo ratings yet
- Pertemuan 1 Skematik Sistem MinimumDocument1 pagePertemuan 1 Skematik Sistem MinimumETC CLASSNo ratings yet
- Faculty of Electrical and Electronic Engineering 2020 - 2021Document37 pagesFaculty of Electrical and Electronic Engineering 2020 - 2021Thinh LêNo ratings yet
- Atmega8 LCD TimerDocument1 pageAtmega8 LCD TimerВадим МкртчянNo ratings yet
- Proteusultimo PDFDocument1 pageProteusultimo PDFxavier ortizNo ratings yet
- Course No: MTE 3104 Course Name: Microcontroller & Interfacing SessionalsDocument7 pagesCourse No: MTE 3104 Course Name: Microcontroller & Interfacing SessionalsChetona DasNo ratings yet
- Adc Pic16f877Document1 pageAdc Pic16f877Phap Nguyen100% (1)
- Avr Doctor SchematicDocument1 pageAvr Doctor Schematiczoran_stev100% (1)
- Da DKCNDocument3 pagesDa DKCNTrọng LêNo ratings yet
- Interface of DC MotorDocument2 pagesInterface of DC Motormotefo5908No ratings yet
- SDNL 1Document1 pageSDNL 1Trọng LêNo ratings yet
- Exemplo KetyDocument2 pagesExemplo Ketyric1988lealNo ratings yet
- New ProjectDocument1 pageNew ProjectAhmad Zaki IdrisNo ratings yet
- Ckds 1307Document13 pagesCkds 1307chanh4351180005No ratings yet
- Drill 6.0 Adc Dac Sensors Part 2Document14 pagesDrill 6.0 Adc Dac Sensors Part 2DuaneNo ratings yet
- Ch4 TimersDocument18 pagesCh4 TimersBerra BeşerNo ratings yet
- Practical-11: AIM: To Study Speed Control of Stepper Motor Using Microcontroller. TheoryDocument2 pagesPractical-11: AIM: To Study Speed Control of Stepper Motor Using Microcontroller. TheoryHardik PatoliyaNo ratings yet
- ZZZZDocument1 pageZZZZid musicNo ratings yet
- MicroCR IDocument102 pagesMicroCR IRoxana ButaNo ratings yet
- Dien Tro 330 OmDocument4 pagesDien Tro 330 OmQuang LuậnNo ratings yet
- Bargraph RC Signal Reader Meter CircuitDocument1 pageBargraph RC Signal Reader Meter Circuitkidal permonoNo ratings yet
- Programa LedsDocument8 pagesPrograma Ledsodin11611No ratings yet
- TFT Controller CIrcuitDocument1 pageTFT Controller CIrcuitAwais RiazNo ratings yet
- Diagram ADocument1 pageDiagram AOscar Andres Soto100% (2)
- 310010023Document13 pages310010023setiawanrezieNo ratings yet
- D2 Ldr1Document1 pageD2 Ldr1Guilherme Souza SanchezNo ratings yet
- LED Pattern CKTDocument5 pagesLED Pattern CKTmikiNo ratings yet
- Experiment 4: Connecting Input DevicesDocument15 pagesExperiment 4: Connecting Input DevicesTariq MograbiNo ratings yet
- New ProjectDocument1 pageNew ProjectSahariar Bin ShafiqueNo ratings yet
- New ProjectDocument1 pageNew ProjectJob JuliusNo ratings yet
- ATMEGA8A ATMELCorporation PDFDocument320 pagesATMEGA8A ATMELCorporation PDFtomas EdisonNo ratings yet
- ATmega48A, ATmega48PA, ATmega88A, ATmega88PA, ATmega168A, ATmega1688PA, ATmega328, ATmega328P DatasheetDocument1 pageATmega48A, ATmega48PA, ATmega88A, ATmega88PA, ATmega168A, ATmega1688PA, ATmega328, ATmega328P DatasheetPollonezNo ratings yet
- MPI4Document12 pagesMPI4Sohira QaziNo ratings yet
- 16FUSB Schematic-1.2 PDFDocument1 page16FUSB Schematic-1.2 PDFgermanmkurylo100% (1)
- PCB Mora-1Document2 pagesPCB Mora-1RaulNo ratings yet
- LCD Pg240128-A For Pic16f887Document1 pageLCD Pg240128-A For Pic16f887Edergf Gomes Ferreira100% (1)
- Mini DSO Scheme V2.0Document1 pageMini DSO Scheme V2.0FernandoNo ratings yet
- Doc1 - ArduinoDocument1 pageDoc1 - ArduinoEduar Becerra MartinezNo ratings yet
- HarshaDocument14 pagesHarshaUjjwal Deb BarmanNo ratings yet
- KS31203 Embedded System: LECTURE 6 - Working With Time: Interrupts and TimersDocument32 pagesKS31203 Embedded System: LECTURE 6 - Working With Time: Interrupts and TimersZulhaily ZhafranNo ratings yet
- PIC16F87XA Data Sheet: 28/40-Pin Enhanced FLASH MicrocontrollersDocument56 pagesPIC16F87XA Data Sheet: 28/40-Pin Enhanced FLASH MicrocontrollersXinantecatl L SolaresNo ratings yet
- KeypadDocument1 pageKeypadPhap Nguyen100% (1)
- Practicas Del PIC18F4550 en C Con El Compilador CCSDocument5 pagesPracticas Del PIC18F4550 en C Con El Compilador CCSManuel godoy ramirez100% (1)
- Infra Red: J1 DisplayDocument3 pagesInfra Red: J1 DisplayKyungsoo100% (1)
- ATmega8, L PDFDocument23 pagesATmega8, L PDFVlad VladosNo ratings yet
- Circuit1 PDFDocument1 pageCircuit1 PDFTri WidiyantoNo ratings yet
- LCDCharacterDocument1 pageLCDCharacterJIGNESH100% (1)
- ATMEGA328P-AU Basic Schematic KakushinDocument1 pageATMEGA328P-AU Basic Schematic KakushinSajad DehghanNo ratings yet
- Attiny26 CompleteDocument182 pagesAttiny26 CompleteSandeep DavidNo ratings yet
- 8-Bit With 8K Bytes In-System Programmable Flash Atmega8 Atmega8LDocument310 pages8-Bit With 8K Bytes In-System Programmable Flash Atmega8 Atmega8LoyeshsNo ratings yet
- Line Follower Robot For Library Inventory Management System NewDocument3 pagesLine Follower Robot For Library Inventory Management System NewTrinesh GowdaNo ratings yet
- lg3s121 PDFDocument28 pageslg3s121 PDFlibre2009No ratings yet
- 8051 Core Microcontroller & InterfacingDocument45 pages8051 Core Microcontroller & InterfacingsumitramotadeNo ratings yet
- 1UDC CatalogueDocument6 pages1UDC CatalogueGamatronicNo ratings yet
- Smart Blind Stick Project Using Arduino and SensorsDocument11 pagesSmart Blind Stick Project Using Arduino and SensorsdewasuryantoNo ratings yet
- 77256v1 - FW Prism and Spectrum Host Uni II InstallGuideDocument61 pages77256v1 - FW Prism and Spectrum Host Uni II InstallGuideCesar JimenezNo ratings yet
- Multimeter FSMDocument68 pagesMultimeter FSMbyzybyzy0% (1)
- ST3400SRG: DescriptionDocument6 pagesST3400SRG: DescriptionHiển AmplierNo ratings yet
- AD9467Document32 pagesAD9467Mehmet YıldızNo ratings yet
- UntitledDocument4 pagesUntitledCameron StewartNo ratings yet
- PHILIPS 32PFL3057.V7 CH STAR182VG PDFDocument58 pagesPHILIPS 32PFL3057.V7 CH STAR182VG PDFDa El100% (1)
- TF2105-09-Sinusoids and PhasorsDocument26 pagesTF2105-09-Sinusoids and PhasorsGilbert SihombingNo ratings yet
- RJH30Document8 pagesRJH30Mahmoued YasinNo ratings yet
- AC To AC ConversionDocument6 pagesAC To AC ConversionTaniyaNo ratings yet
- ADC Unit 1S1, S2, S3Document31 pagesADC Unit 1S1, S2, S3CHANDRAKANT TRIPATHI (RA2011053010028)No ratings yet
- Automatic Battery ChargerDocument2 pagesAutomatic Battery ChargervipincktyNo ratings yet
- Snubber Circuits With ExplantionDocument9 pagesSnubber Circuits With ExplantioncoolsinghrkNo ratings yet
- DNet Troubleshooting Guide v1.0Document5 pagesDNet Troubleshooting Guide v1.0BocefaloNo ratings yet
- BS EN 55032-2015 Plus Cor2016 Plus A11-2020Document110 pagesBS EN 55032-2015 Plus Cor2016 Plus A11-2020flaviopoNo ratings yet
- Ug1302 Vcu128 Eval BDDocument100 pagesUg1302 Vcu128 Eval BDMohamed TarekNo ratings yet
- Basic ComputerDocument3 pagesBasic ComputerDreime Estandarte-DecretoNo ratings yet
- SSCD Mod 1Document25 pagesSSCD Mod 1vickyNo ratings yet
- AAU3911 Technical Specifications (V100R016C10 - 02) (PDF) - ENDocument165 pagesAAU3911 Technical Specifications (V100R016C10 - 02) (PDF) - ENvitor santosNo ratings yet
- Gold Tool TCT-2690PRO Eng ManDocument14 pagesGold Tool TCT-2690PRO Eng ManJon TimanNo ratings yet
- Cobra ODE Installation Manual (English)Document46 pagesCobra ODE Installation Manual (English)ChipytoNo ratings yet
- MCQs Related To Logic GatesDocument18 pagesMCQs Related To Logic GatesIqra JavedNo ratings yet
- Submittal For Al Barsha 1451 Rev0 PDFDocument55 pagesSubmittal For Al Barsha 1451 Rev0 PDFGokulNo ratings yet
- Dell Storage Center SC4020 Storage System OwnerManualDocument41 pagesDell Storage Center SC4020 Storage System OwnerManualfarrukh_meNo ratings yet
- Fc-100 Service Notes: SpecificationsDocument8 pagesFc-100 Service Notes: SpecificationsNina FernandezNo ratings yet
- Power Theft Identification System in Distribution Lines Using Differential Power MeasurementDocument71 pagesPower Theft Identification System in Distribution Lines Using Differential Power MeasurementSairam Sai100% (1)
























































































Download as docx, pdf, or txt
You might also like
- Exercises To Get Prepared For The Final ExamDocument29 pagesExercises To Get Prepared For The Final ExamGöksun NejatNo ratings yet
- Proteus LEDDocument3 pagesProteus LEDMuhammad Zikri AbdillahNo ratings yet
- Skematik DSNDocument1 pageSkematik DSNAsrul YanuarNo ratings yet
- Minimum System Atmega8 H-Bridge Motor Driver: Putar Kanan Putar KiriDocument1 pageMinimum System Atmega8 H-Bridge Motor Driver: Putar Kanan Putar KiriJeAmmy BelajarSabarrNo ratings yet
- Transformer Voltage Regulator Rectifier Input C3 C1Document1 pageTransformer Voltage Regulator Rectifier Input C3 C1Waqas AhmadNo ratings yet
- Incubadora de Transporte Itr-2S: CPU 3 A4Document1 pageIncubadora de Transporte Itr-2S: CPU 3 A4CamilaNo ratings yet
- Drill 2.0 Basic I-O Switching TheoryDocument13 pagesDrill 2.0 Basic I-O Switching TheoryDuaneNo ratings yet
- EEE373LLAB Group10Document5 pagesEEE373LLAB Group10Motasim FaiyazNo ratings yet
- Final Exam Topic 6 - Example Questions - SPIDocument4 pagesFinal Exam Topic 6 - Example Questions - SPITiến ThànhNo ratings yet
- CKT DiagramDocument1 pageCKT Diagramelisario JoseNo ratings yet
- Pertemuan 1 Skematik Sistem MinimumDocument1 pagePertemuan 1 Skematik Sistem MinimumETC CLASSNo ratings yet
- Faculty of Electrical and Electronic Engineering 2020 - 2021Document37 pagesFaculty of Electrical and Electronic Engineering 2020 - 2021Thinh LêNo ratings yet
- Atmega8 LCD TimerDocument1 pageAtmega8 LCD TimerВадим МкртчянNo ratings yet
- Proteusultimo PDFDocument1 pageProteusultimo PDFxavier ortizNo ratings yet
- Course No: MTE 3104 Course Name: Microcontroller & Interfacing SessionalsDocument7 pagesCourse No: MTE 3104 Course Name: Microcontroller & Interfacing SessionalsChetona DasNo ratings yet
- Adc Pic16f877Document1 pageAdc Pic16f877Phap Nguyen100% (1)
- Avr Doctor SchematicDocument1 pageAvr Doctor Schematiczoran_stev100% (1)
- Da DKCNDocument3 pagesDa DKCNTrọng LêNo ratings yet
- Interface of DC MotorDocument2 pagesInterface of DC Motormotefo5908No ratings yet
- SDNL 1Document1 pageSDNL 1Trọng LêNo ratings yet
- Exemplo KetyDocument2 pagesExemplo Ketyric1988lealNo ratings yet
- New ProjectDocument1 pageNew ProjectAhmad Zaki IdrisNo ratings yet
- Ckds 1307Document13 pagesCkds 1307chanh4351180005No ratings yet
- Drill 6.0 Adc Dac Sensors Part 2Document14 pagesDrill 6.0 Adc Dac Sensors Part 2DuaneNo ratings yet
- Ch4 TimersDocument18 pagesCh4 TimersBerra BeşerNo ratings yet
- Practical-11: AIM: To Study Speed Control of Stepper Motor Using Microcontroller. TheoryDocument2 pagesPractical-11: AIM: To Study Speed Control of Stepper Motor Using Microcontroller. TheoryHardik PatoliyaNo ratings yet
- ZZZZDocument1 pageZZZZid musicNo ratings yet
- MicroCR IDocument102 pagesMicroCR IRoxana ButaNo ratings yet
- Dien Tro 330 OmDocument4 pagesDien Tro 330 OmQuang LuậnNo ratings yet
- Bargraph RC Signal Reader Meter CircuitDocument1 pageBargraph RC Signal Reader Meter Circuitkidal permonoNo ratings yet
- Programa LedsDocument8 pagesPrograma Ledsodin11611No ratings yet
- TFT Controller CIrcuitDocument1 pageTFT Controller CIrcuitAwais RiazNo ratings yet
- Diagram ADocument1 pageDiagram AOscar Andres Soto100% (2)
- 310010023Document13 pages310010023setiawanrezieNo ratings yet
- D2 Ldr1Document1 pageD2 Ldr1Guilherme Souza SanchezNo ratings yet
- LED Pattern CKTDocument5 pagesLED Pattern CKTmikiNo ratings yet
- Experiment 4: Connecting Input DevicesDocument15 pagesExperiment 4: Connecting Input DevicesTariq MograbiNo ratings yet
- New ProjectDocument1 pageNew ProjectSahariar Bin ShafiqueNo ratings yet
- New ProjectDocument1 pageNew ProjectJob JuliusNo ratings yet
- ATMEGA8A ATMELCorporation PDFDocument320 pagesATMEGA8A ATMELCorporation PDFtomas EdisonNo ratings yet
- ATmega48A, ATmega48PA, ATmega88A, ATmega88PA, ATmega168A, ATmega1688PA, ATmega328, ATmega328P DatasheetDocument1 pageATmega48A, ATmega48PA, ATmega88A, ATmega88PA, ATmega168A, ATmega1688PA, ATmega328, ATmega328P DatasheetPollonezNo ratings yet
- MPI4Document12 pagesMPI4Sohira QaziNo ratings yet
- 16FUSB Schematic-1.2 PDFDocument1 page16FUSB Schematic-1.2 PDFgermanmkurylo100% (1)
- PCB Mora-1Document2 pagesPCB Mora-1RaulNo ratings yet
- LCD Pg240128-A For Pic16f887Document1 pageLCD Pg240128-A For Pic16f887Edergf Gomes Ferreira100% (1)
- Mini DSO Scheme V2.0Document1 pageMini DSO Scheme V2.0FernandoNo ratings yet
- Doc1 - ArduinoDocument1 pageDoc1 - ArduinoEduar Becerra MartinezNo ratings yet
- HarshaDocument14 pagesHarshaUjjwal Deb BarmanNo ratings yet
- KS31203 Embedded System: LECTURE 6 - Working With Time: Interrupts and TimersDocument32 pagesKS31203 Embedded System: LECTURE 6 - Working With Time: Interrupts and TimersZulhaily ZhafranNo ratings yet
- PIC16F87XA Data Sheet: 28/40-Pin Enhanced FLASH MicrocontrollersDocument56 pagesPIC16F87XA Data Sheet: 28/40-Pin Enhanced FLASH MicrocontrollersXinantecatl L SolaresNo ratings yet
- KeypadDocument1 pageKeypadPhap Nguyen100% (1)
- Practicas Del PIC18F4550 en C Con El Compilador CCSDocument5 pagesPracticas Del PIC18F4550 en C Con El Compilador CCSManuel godoy ramirez100% (1)
- Infra Red: J1 DisplayDocument3 pagesInfra Red: J1 DisplayKyungsoo100% (1)
- ATmega8, L PDFDocument23 pagesATmega8, L PDFVlad VladosNo ratings yet
- Circuit1 PDFDocument1 pageCircuit1 PDFTri WidiyantoNo ratings yet
- LCDCharacterDocument1 pageLCDCharacterJIGNESH100% (1)
- ATMEGA328P-AU Basic Schematic KakushinDocument1 pageATMEGA328P-AU Basic Schematic KakushinSajad DehghanNo ratings yet
- Attiny26 CompleteDocument182 pagesAttiny26 CompleteSandeep DavidNo ratings yet
- 8-Bit With 8K Bytes In-System Programmable Flash Atmega8 Atmega8LDocument310 pages8-Bit With 8K Bytes In-System Programmable Flash Atmega8 Atmega8LoyeshsNo ratings yet
- Line Follower Robot For Library Inventory Management System NewDocument3 pagesLine Follower Robot For Library Inventory Management System NewTrinesh GowdaNo ratings yet
- lg3s121 PDFDocument28 pageslg3s121 PDFlibre2009No ratings yet
- 8051 Core Microcontroller & InterfacingDocument45 pages8051 Core Microcontroller & InterfacingsumitramotadeNo ratings yet
- 1UDC CatalogueDocument6 pages1UDC CatalogueGamatronicNo ratings yet
- Smart Blind Stick Project Using Arduino and SensorsDocument11 pagesSmart Blind Stick Project Using Arduino and SensorsdewasuryantoNo ratings yet
- 77256v1 - FW Prism and Spectrum Host Uni II InstallGuideDocument61 pages77256v1 - FW Prism and Spectrum Host Uni II InstallGuideCesar JimenezNo ratings yet
- Multimeter FSMDocument68 pagesMultimeter FSMbyzybyzy0% (1)
- ST3400SRG: DescriptionDocument6 pagesST3400SRG: DescriptionHiển AmplierNo ratings yet
- AD9467Document32 pagesAD9467Mehmet YıldızNo ratings yet
- UntitledDocument4 pagesUntitledCameron StewartNo ratings yet
- PHILIPS 32PFL3057.V7 CH STAR182VG PDFDocument58 pagesPHILIPS 32PFL3057.V7 CH STAR182VG PDFDa El100% (1)
- TF2105-09-Sinusoids and PhasorsDocument26 pagesTF2105-09-Sinusoids and PhasorsGilbert SihombingNo ratings yet
- RJH30Document8 pagesRJH30Mahmoued YasinNo ratings yet
- AC To AC ConversionDocument6 pagesAC To AC ConversionTaniyaNo ratings yet
- ADC Unit 1S1, S2, S3Document31 pagesADC Unit 1S1, S2, S3CHANDRAKANT TRIPATHI (RA2011053010028)No ratings yet
- Automatic Battery ChargerDocument2 pagesAutomatic Battery ChargervipincktyNo ratings yet
- Snubber Circuits With ExplantionDocument9 pagesSnubber Circuits With ExplantioncoolsinghrkNo ratings yet
- DNet Troubleshooting Guide v1.0Document5 pagesDNet Troubleshooting Guide v1.0BocefaloNo ratings yet
- BS EN 55032-2015 Plus Cor2016 Plus A11-2020Document110 pagesBS EN 55032-2015 Plus Cor2016 Plus A11-2020flaviopoNo ratings yet
- Ug1302 Vcu128 Eval BDDocument100 pagesUg1302 Vcu128 Eval BDMohamed TarekNo ratings yet
- Basic ComputerDocument3 pagesBasic ComputerDreime Estandarte-DecretoNo ratings yet
- SSCD Mod 1Document25 pagesSSCD Mod 1vickyNo ratings yet
- AAU3911 Technical Specifications (V100R016C10 - 02) (PDF) - ENDocument165 pagesAAU3911 Technical Specifications (V100R016C10 - 02) (PDF) - ENvitor santosNo ratings yet
- Gold Tool TCT-2690PRO Eng ManDocument14 pagesGold Tool TCT-2690PRO Eng ManJon TimanNo ratings yet
- Cobra ODE Installation Manual (English)Document46 pagesCobra ODE Installation Manual (English)ChipytoNo ratings yet
- MCQs Related To Logic GatesDocument18 pagesMCQs Related To Logic GatesIqra JavedNo ratings yet
- Submittal For Al Barsha 1451 Rev0 PDFDocument55 pagesSubmittal For Al Barsha 1451 Rev0 PDFGokulNo ratings yet
- Dell Storage Center SC4020 Storage System OwnerManualDocument41 pagesDell Storage Center SC4020 Storage System OwnerManualfarrukh_meNo ratings yet
- Fc-100 Service Notes: SpecificationsDocument8 pagesFc-100 Service Notes: SpecificationsNina FernandezNo ratings yet
- Power Theft Identification System in Distribution Lines Using Differential Power MeasurementDocument71 pagesPower Theft Identification System in Distribution Lines Using Differential Power MeasurementSairam Sai100% (1)