Download as pdf or txt
You might also like
- Kali Linux DocumentationDocument22 pagesKali Linux DocumentationTech VkNo ratings yet
- My Book of Life by AngelDocument13 pagesMy Book of Life by AngelMacmillan Publishers19% (21)
- Design of A 4-Way Passive Cross-Over Network - 0 PDFDocument100 pagesDesign of A 4-Way Passive Cross-Over Network - 0 PDFBrandy ThomasNo ratings yet
- Fundamental Concepts of AlgebraDocument10 pagesFundamental Concepts of Algebrakingson0% (1)
- Traversable Wormholes, Stargates, and Negative EnergyDocument43 pagesTraversable Wormholes, Stargates, and Negative EnergyMystery Wire100% (4)
- Multi Objective Task Scheduling Using Hybrid Whale GeneticDocument27 pagesMulti Objective Task Scheduling Using Hybrid Whale GeneticBhaskar BanerjeeNo ratings yet
- An Enhanced Hyper-Heuristics Task Scheduling in Cloud ComputingDocument6 pagesAn Enhanced Hyper-Heuristics Task Scheduling in Cloud ComputingShrinidhi GowdaNo ratings yet
- Management of Data Intensive Application Workflow in Cloud ComputingDocument4 pagesManagement of Data Intensive Application Workflow in Cloud ComputingInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Effective Approach For Load Balancing and ResouDocument13 pagesAn Effective Approach For Load Balancing and ResouRABINA BAGGANo ratings yet
- Resource Management and Scheduling in Cloud EnvironmentDocument8 pagesResource Management and Scheduling in Cloud Environmentvickyvarath100% (1)
- Scheduling and Resource Allocation On Cloud Computing: SurveyDocument5 pagesScheduling and Resource Allocation On Cloud Computing: SurveyR M Shi NyNo ratings yet
- Adaptive Scheduling On Power-Aware Managed Data-Centers Using Machine LearningDocument8 pagesAdaptive Scheduling On Power-Aware Managed Data-Centers Using Machine LearningKevin MondragonNo ratings yet
- Machine Learning Approach To Select Optimal Task Scheduling Algorithm in CloudDocument16 pagesMachine Learning Approach To Select Optimal Task Scheduling Algorithm in CloudKaouther BenaliNo ratings yet
- 1024-Article Text-5071-1-10-20240315Document19 pages1024-Article Text-5071-1-10-20240315jebaevaNo ratings yet
- An Efficient Symbiotic Organisms SearchDocument55 pagesAn Efficient Symbiotic Organisms SearchsanaNo ratings yet
- Ejsr 65 3 15Document10 pagesEjsr 65 3 15AbiJosh ZenNo ratings yet
- MTD-DHJS Makespan-Optimized Task Scheduling Algorithm For Cloud Computing With Dynamic Computational Time PredictionDocument41 pagesMTD-DHJS Makespan-Optimized Task Scheduling Algorithm For Cloud Computing With Dynamic Computational Time Predictionakshay ambekarNo ratings yet
- 127 PDFDocument5 pages127 PDFInternational Journal of Scientific Research in Science, Engineering and Technology ( IJSRSET )No ratings yet
- Improved Task Scheduling Model With Task Grouping For Cost and Time OptimizationDocument5 pagesImproved Task Scheduling Model With Task Grouping For Cost and Time OptimizationAnurag JainNo ratings yet
- Benefits of Global Grid Computing For Job Scheduling: Carsten Ernemann, Volker Hamscher, Ramin YahyapourDocument6 pagesBenefits of Global Grid Computing For Job Scheduling: Carsten Ernemann, Volker Hamscher, Ramin YahyapourRoba AlnajjarNo ratings yet
- Paper 1Document9 pagesPaper 1PROJECT POINTNo ratings yet
- A Hybrid Metaheuristic For Multi-Objective ScientificDocument21 pagesA Hybrid Metaheuristic For Multi-Objective Scientificu chaitanyaNo ratings yet
- Aravind PDFDocument29 pagesAravind PDFAnonymous bzQwzmVvNo ratings yet
- International Journal of Engineering Research and DevelopmentDocument4 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- 7 Stefan Microservice Ei 16 2022Document26 pages7 Stefan Microservice Ei 16 2022ihakalanka1998No ratings yet
- An Infrastructure For Dynamic Resource Scheduling and Virtual Machine Based Prediction in The CloudDocument5 pagesAn Infrastructure For Dynamic Resource Scheduling and Virtual Machine Based Prediction in The CloudKarthikaMurugesanNo ratings yet
- Dynamically Optimized Cost Based Task Scheduling in Cloud ComputingDocument5 pagesDynamically Optimized Cost Based Task Scheduling in Cloud ComputingInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Machine Learning Based Decision Making by Brokers in Cloud ComputingDocument5 pagesMachine Learning Based Decision Making by Brokers in Cloud ComputingInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Ijcnc 52018 FinalDocument13 pagesIjcnc 52018 Finalabutalib fadlallahNo ratings yet
- TASK - SCHEDULING MCDM PDFDocument17 pagesTASK - SCHEDULING MCDM PDFMunmun SahaNo ratings yet
- Survey On Job Scheduling Algorithms in Cloud ComputingDocument4 pagesSurvey On Job Scheduling Algorithms in Cloud ComputingInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Paper Seminar Group 14Document4 pagesPaper Seminar Group 14sourav mahajanNo ratings yet
- 1999 A Unified Resource Scheduling Framework For Heterogeneous Computing EnvironmentsDocument10 pages1999 A Unified Resource Scheduling Framework For Heterogeneous Computing EnvironmentsEduardo Cotrin TeixeiraNo ratings yet
- Devaraj 2020Document10 pagesDevaraj 2020Chakib BenmhamedNo ratings yet
- Machine Learning Based Hybrid Recurrent DataDriven Flow Algorithm of Identify The Risk of Data Flow Error Detection in Cloud ComputingDocument9 pagesMachine Learning Based Hybrid Recurrent DataDriven Flow Algorithm of Identify The Risk of Data Flow Error Detection in Cloud ComputingIJRASETPublicationsNo ratings yet
- (IJETA-V3I3P6) :mandeep Kaur, Manoj AgnihotriDocument5 pages(IJETA-V3I3P6) :mandeep Kaur, Manoj AgnihotriIJETA - EighthSenseGroupNo ratings yet
- L4 - Resource ProvisioningDocument18 pagesL4 - Resource ProvisioningRohit Baghel RajputNo ratings yet
- Task Partitioning Scheduling Algorithms For Heterogeneous Multi-Cloud EnvironmentDocument21 pagesTask Partitioning Scheduling Algorithms For Heterogeneous Multi-Cloud Environmentsohan pandeNo ratings yet
- A Proactive Approach For Resource Provisioning in Cloud ComputingDocument10 pagesA Proactive Approach For Resource Provisioning in Cloud ComputingM.Satyendra kumarNo ratings yet
- Grid Scheduling Using Various Performance Measures - A Comparative StudyDocument12 pagesGrid Scheduling Using Various Performance Measures - A Comparative StudyUbiquitous Computing and Communication JournalNo ratings yet
- Scaling Service-Oriented Applications Into Geo-Distributed CloudsDocument6 pagesScaling Service-Oriented Applications Into Geo-Distributed CloudsJames SmithNo ratings yet
- J. Parallel Distrib. Comput.: Jiayin Li Meikang Qiu Zhong Ming Gang Quan Xiao Qin Zonghua GuDocument12 pagesJ. Parallel Distrib. Comput.: Jiayin Li Meikang Qiu Zhong Ming Gang Quan Xiao Qin Zonghua GusasidharchennamsettyNo ratings yet
- Task Deployment DraftDocument11 pagesTask Deployment DraftVikas ChoudharyNo ratings yet
- 6-A Cost Estimation Model For Cloud Services and Applying To PC Laboratory PlatformsDocument13 pages6-A Cost Estimation Model For Cloud Services and Applying To PC Laboratory PlatformsJOSE GABRIEL CORTAZAR OCAMPONo ratings yet
- Aloocatin Future ScopeDocument5 pagesAloocatin Future ScopejorisdudaNo ratings yet
- Mathematics 11 02126 v2Document18 pagesMathematics 11 02126 v2Bhaskar BanerjeeNo ratings yet
- IJEDR1602271Document5 pagesIJEDR1602271Rohit SahasrajithNo ratings yet
- Survey Paper For Maximization of Profit in Cloud ComputingDocument6 pagesSurvey Paper For Maximization of Profit in Cloud ComputingseventhsensegroupNo ratings yet
- Building Efficient Resource Management Systems in The Cloud: Opportunities and ChallengesDocument16 pagesBuilding Efficient Resource Management Systems in The Cloud: Opportunities and ChallengesAlexking1985No ratings yet
- Energy Efficiency in Cloud Data Centers Using Load BalancingDocument8 pagesEnergy Efficiency in Cloud Data Centers Using Load BalancingseventhsensegroupNo ratings yet
- A Review of Task Scheduling in Cloud Computing Based On Nature-Inspired Optimization AlgorithmDocument32 pagesA Review of Task Scheduling in Cloud Computing Based On Nature-Inspired Optimization Algorithmakshay ambekarNo ratings yet
- A Task Scheduling Algorithm With Improved Makespan Based On Prediction of Tasks Computation Time Algorithm For Cloud ComputingDocument11 pagesA Task Scheduling Algorithm With Improved Makespan Based On Prediction of Tasks Computation Time Algorithm For Cloud Computingakshay ambekarNo ratings yet
- Kanniga IJASCA SplIssue ID 062 FinalVersionDocument13 pagesKanniga IJASCA SplIssue ID 062 FinalVersionAhmad FaisalNo ratings yet
- A Systematic Approach To Composing and Optimizing Application WorkflowsDocument9 pagesA Systematic Approach To Composing and Optimizing Application WorkflowsLeo Kwee WahNo ratings yet
- Elvina Fatma Widiyani - 20809334061 - UTS Review JurnalDocument55 pagesElvina Fatma Widiyani - 20809334061 - UTS Review Jurnalelvina fatmaWNo ratings yet
- 02 - A Performance Modeling Framework For Microservices-Based Cloud InfrastructuresDocument42 pages02 - A Performance Modeling Framework For Microservices-Based Cloud InfrastructuresCayo OliveiraNo ratings yet
- A Survey of Scheduling Algorithms in Cloud Computing: Njoud Almansour Nasro Min AllahDocument6 pagesA Survey of Scheduling Algorithms in Cloud Computing: Njoud Almansour Nasro Min AllahMuhammad Atiq ur RehmanNo ratings yet
- Load Balancing in Cloud ComputingDocument14 pagesLoad Balancing in Cloud ComputingAnonymous CwJeBCAXpNo ratings yet
- Research On Cloud Computing Resources Provisioning Based On Reinforcement LearningDocument16 pagesResearch On Cloud Computing Resources Provisioning Based On Reinforcement LearningAnuj Pratap SinghNo ratings yet
- A Heuristics-Based Cost Model For Scientific Workflow Scheduling in CloudDocument19 pagesA Heuristics-Based Cost Model For Scientific Workflow Scheduling in CloudsranilNo ratings yet
- Task Scheduling in A Cloud Environment: A Comparative StudyDocument5 pagesTask Scheduling in A Cloud Environment: A Comparative StudyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Systematic Inspection of Scheduling Policies and Algorithms in Grid ComputingDocument7 pagesSystematic Inspection of Scheduling Policies and Algorithms in Grid ComputingInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Related Work 1Document8 pagesRelated Work 1uzma nisarNo ratings yet
- 1 s2.0 S1569190X23001417 MainDocument20 pages1 s2.0 S1569190X23001417 MainkusmaderushikeshNo ratings yet
- Model-Driven Online Capacity Management for Component-Based Software SystemsFrom EverandModel-Driven Online Capacity Management for Component-Based Software SystemsNo ratings yet
- The Odyssey: By: HomerDocument7 pagesThe Odyssey: By: HomerSteven ArajaNo ratings yet
- Hsu Early Printing Egypt Vol1Document198 pagesHsu Early Printing Egypt Vol1dln2510No ratings yet
- Garrett PD 65001 User ManualDocument4 pagesGarrett PD 65001 User ManualFelipe MejiasNo ratings yet
- Joint Letter To President Biden On The Public Health EmergencyDocument3 pagesJoint Letter To President Biden On The Public Health EmergencyPennCapitalStarNo ratings yet
- The Following Selected Transactions Were Completed PDFDocument1 pageThe Following Selected Transactions Were Completed PDFAnbu jaromia0% (1)
- 3 San Miguel Corp V Heirs of InguitoDocument21 pages3 San Miguel Corp V Heirs of InguitokwonpenguinNo ratings yet
- Astm A572Document4 pagesAstm A572Kaushal KishoreNo ratings yet
- Napthpajakri Tender 1 - PCD-575Document42 pagesNapthpajakri Tender 1 - PCD-575JamjamNo ratings yet
- English 3 - Q2 - M15 v2Document19 pagesEnglish 3 - Q2 - M15 v2Angel RicafrenteNo ratings yet
- Kelt RonDocument98 pagesKelt RonGeorge KurishummoottilNo ratings yet
- Smart CitiesDocument11 pagesSmart CitiesjaripogNo ratings yet
- Cellular RespirationDocument36 pagesCellular RespirationWillow ItchiroNo ratings yet
- Final ReportDocument110 pagesFinal ReportmasabmuzamilNo ratings yet
- 3 8 PrepositionsDocument5 pages3 8 PrepositionsPratyuusha PunjabiNo ratings yet
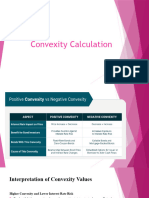
- Convexity CalculationDocument7 pagesConvexity CalculationRabeya AktarNo ratings yet
- 8615 OkDocument16 pages8615 OkRubab MalikNo ratings yet
- Unit Quiz Lesson 4,5,6 Tour Guiding ServicesDocument2 pagesUnit Quiz Lesson 4,5,6 Tour Guiding ServicesJundee L. CarrilloNo ratings yet
- American Iron 347 - 2017 USADocument124 pagesAmerican Iron 347 - 2017 USANenadStankovićNo ratings yet
- Girls Camp ProposalDocument7 pagesGirls Camp ProposalRena SkNo ratings yet
- Songbook PatrioticDocument6 pagesSongbook Patrioticapi-54606121533% (3)
- Lesson 1 - JobsDocument22 pagesLesson 1 - JobsHydie Cruz67% (3)
- Indo Global College of Architecture, Abhipur: Sector: 33-A, Noida, Uttar PradeshDocument86 pagesIndo Global College of Architecture, Abhipur: Sector: 33-A, Noida, Uttar PradeshPrarthana GhoshNo ratings yet
- The Guy in The GlassDocument1 pageThe Guy in The GlassAnkush AgrawalNo ratings yet
- Art of Prolonging LifeDocument83 pagesArt of Prolonging LifePaulo SilvaNo ratings yet
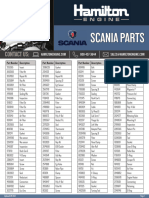
- Scania Diesel Engine Parts CatalogDocument3 pagesScania Diesel Engine Parts CatalogTarek MassimoNo ratings yet