Download as xlsx, pdf, or txt
You might also like
- Earthquake Loads NSCP 2015Document10 pagesEarthquake Loads NSCP 2015Franklyn Genove33% (3)
- Checking of Loading Order: Fujairah Murban +/-5% 5.0% - 5.0%Document14 pagesChecking of Loading Order: Fujairah Murban +/-5% 5.0% - 5.0%shishir kumar100% (1)
- SL - No Description Current Setting Revised Setting Current Setting Revised Setting Current Setting Revised SettingDocument15 pagesSL - No Description Current Setting Revised Setting Current Setting Revised Setting Current Setting Revised SettingPraneeth ReddyNo ratings yet
- Fixed Quantity MethodDocument6 pagesFixed Quantity MethodAmit AdmuneNo ratings yet
- What Is The Tolerance Analysis - QRDocument15 pagesWhat Is The Tolerance Analysis - QRAnonymous tQhtrPbNo ratings yet
- Tidal Prediction Form2Document1 pageTidal Prediction Form2Sunny Bebs R. BasasNo ratings yet
- EP AD 2 EPKK 5-3-2-0 enDocument4 pagesEP AD 2 EPKK 5-3-2-0 enWiktor BukowskiNo ratings yet
- SEPAM ProtectionDocument14 pagesSEPAM ProtectionYigit SarıkayaNo ratings yet
- Nevi Palinsa 2020211034Document12 pagesNevi Palinsa 2020211034Ari ArdiansyahNo ratings yet
- Form 6 DNP3 Map Points August 24, 2012 v2.0Document12 pagesForm 6 DNP3 Map Points August 24, 2012 v2.0Daniel Elias GCNo ratings yet
- Curvas Rele Micon SchneiderDocument2 pagesCurvas Rele Micon SchneiderDanilo QuevedoNo ratings yet
- EFG7Document1 pageEFG7محمد عليNo ratings yet
- 220kv Busbar Protection Relay Testing Result Siemens 7sg1211Document1 page220kv Busbar Protection Relay Testing Result Siemens 7sg1211tariqNo ratings yet
- Schneider Capacitor Parameter RecordDocument3 pagesSchneider Capacitor Parameter RecordJoe Steve BensonNo ratings yet
- Italifarad Capacitor Parameter RecordDocument3 pagesItalifarad Capacitor Parameter RecordJoe Steve BensonNo ratings yet
- Ca Inter (Income Tax) Ca Vijender AggarwalDocument2 pagesCa Inter (Income Tax) Ca Vijender AggarwalMehul GuptaNo ratings yet
- State Sequencer 21 Test Gitet Bekasi ABCDocument3 pagesState Sequencer 21 Test Gitet Bekasi ABCKevin AprilioNo ratings yet
- EP AD 2 EPKK 5-3-1-0 enDocument5 pagesEP AD 2 EPKK 5-3-1-0 enWiktor BukowskiNo ratings yet
- Tabela Dimens. Cabos-Rev1Document22 pagesTabela Dimens. Cabos-Rev1Daniel RoyoNo ratings yet
- Tutorial 2021-2022 (May)Document1 pageTutorial 2021-2022 (May)Jagannath BasuNo ratings yet
- Nte1751 (X0137ce)Document3 pagesNte1751 (X0137ce)Pedro MoraNo ratings yet
- Data SSA MGDocument6 pagesData SSA MG151Novera Selvia Ulina PandianganNo ratings yet
- B.kothakota Report PDFDocument5 pagesB.kothakota Report PDFToni AndersonNo ratings yet
- Parametrización Ats22d62s6 PDFDocument2 pagesParametrización Ats22d62s6 PDFingguedezandresNo ratings yet
- Lecture Guide CA Inter Accounting (N20)Document3 pagesLecture Guide CA Inter Accounting (N20)Saurav mukherjeeNo ratings yet
- MiCOM IDMT Curves CalculatorDocument2 pagesMiCOM IDMT Curves CalculatorYigit Sarıkaya100% (1)
- Kelompok 3 - Tugas Praktikum DRPDocument40 pagesKelompok 3 - Tugas Praktikum DRPSalsabila AsriNo ratings yet
- VerificationDocument5 pagesVerificationGRINE FaroukNo ratings yet
- Electrical Design Analysis: Proposed Three (3) Units Boarding HouseDocument4 pagesElectrical Design Analysis: Proposed Three (3) Units Boarding HouseRocky SioresNo ratings yet
- Nte 1751Document2 pagesNte 1751Hernan Ortiz EnamoradoNo ratings yet
- Audit Faster Lecture ListIndexDocument1 pageAudit Faster Lecture ListIndexaibotuserNo ratings yet
- NTE7027Document3 pagesNTE7027julio quatriniNo ratings yet
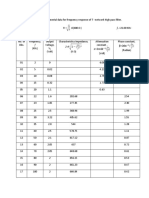
- High Pass TableDocument2 pagesHigh Pass TableShachin DasNo ratings yet
- D (PR609 RIQUALIFICA 22) (TAPPI 271660 - MIN) 1 10-Oct-2022 12-01-04Document24 pagesD (PR609 RIQUALIFICA 22) (TAPPI 271660 - MIN) 1 10-Oct-2022 12-01-04xmbhtw9w94No ratings yet
- BERGES. Operating Manual SLV ACPDocument88 pagesBERGES. Operating Manual SLV ACPБогдан ПакетаNo ratings yet
- Loads List by Spec Equipment Area WWTP3 (Juli 2022)Document3 pagesLoads List by Spec Equipment Area WWTP3 (Juli 2022)Reza SyailendraNo ratings yet
- R1 (K ) C1 (NF) R2 (K ) V (R1) V (R3) : ObservationsDocument2 pagesR1 (K ) C1 (NF) R2 (K ) V (R1) V (R3) : ObservationsUnknown UnknownNo ratings yet
- Session Report: General InformationDocument2 pagesSession Report: General InformationDarrel LutchmanNo ratings yet
- Cálculos Desarrollados Utilizando El Sotfware Bentley Watercad V8i (Red Cerrada)Document6 pagesCálculos Desarrollados Utilizando El Sotfware Bentley Watercad V8i (Red Cerrada)Jhonatan PlasenciaNo ratings yet
- 1-ph Fault at 50302 and Tripping 50302-51951 (ckt1) and 50302-51951 (ckt2) Speed Deviation (PU)Document1 page1-ph Fault at 50302 and Tripping 50302-51951 (ckt1) and 50302-51951 (ckt2) Speed Deviation (PU)Sudhir RavipudiNo ratings yet
- Earthing Pit MatterDocument3 pagesEarthing Pit MatterAMIT SINGH 23No ratings yet
- Ni Pci-6024e PDFDocument14 pagesNi Pci-6024e PDFBoureanu CodrinNo ratings yet
- ECE 342 Solid-State Devices & Circuits 10. MOS AmplifiersDocument24 pagesECE 342 Solid-State Devices & Circuits 10. MOS AmplifiersYousef BilbeisiNo ratings yet
- WhatsMiner 1.4Document2 pagesWhatsMiner 1.4Kenedi LopezNo ratings yet
- Test Object - Device Settings: Substation/BayDocument6 pagesTest Object - Device Settings: Substation/BayWaruna RasanjayaNo ratings yet
- O/C E/F Relay Test ReportDocument2 pagesO/C E/F Relay Test ReportMd. zahidul IslamNo ratings yet
- Video Conference 20200205Document36 pagesVideo Conference 20200205HitenNo ratings yet
- WhatsMiner 1.10Document2 pagesWhatsMiner 1.10Kenedi LopezNo ratings yet
- WhatsMiner 1.8Document2 pagesWhatsMiner 1.8Kenedi LopezNo ratings yet
- Pid 1.1. Proportional Band: 400% Waktu Intrgral: 2 Detik Waktu Derivative: 0,4 MenitDocument7 pagesPid 1.1. Proportional Band: 400% Waktu Intrgral: 2 Detik Waktu Derivative: 0,4 MenitNaya MutiarasariNo ratings yet
- Pid 1.1. Proportional Band: 400% Waktu Intrgral: 2 Detik Waktu Derivative: 0,4 MenitDocument7 pagesPid 1.1. Proportional Band: 400% Waktu Intrgral: 2 Detik Waktu Derivative: 0,4 MenitNaya MutiarasariNo ratings yet
- Pid 1.1. Proportional Band: 400% Waktu Intrgral: 2 Detik Waktu Derivative: 0,4 MenitDocument7 pagesPid 1.1. Proportional Band: 400% Waktu Intrgral: 2 Detik Waktu Derivative: 0,4 MenitNaya MutiarasariNo ratings yet
- Q.No. Type Section Key MarksDocument3 pagesQ.No. Type Section Key Marksaron stromNo ratings yet
- CREW: U.S. Department of Homeland Security: U.S. Customs and Border Protection: Regarding Border Fence: 6/29/10 - FW - 4 VF-300 Types Redacted) 21Document21 pagesCREW: U.S. Department of Homeland Security: U.S. Customs and Border Protection: Regarding Border Fence: 6/29/10 - FW - 4 VF-300 Types Redacted) 21CREWNo ratings yet
- Bhart Forge Apex USB and Vwin GainboardDocument3 pagesBhart Forge Apex USB and Vwin GainboardSarath BabuNo ratings yet
- RXTM30A Capcoolheat 4D148083A ENDocument1 pageRXTM30A Capcoolheat 4D148083A ENWouter Andriesse (Uberghymkhana)No ratings yet