Download as pdf or txt
You might also like
- CFD 2003 - Computational Fluid Dynamics Technology in Ship Hydrodynamics-The Royal Institution of Naval Architects (2003)Document519 pagesCFD 2003 - Computational Fluid Dynamics Technology in Ship Hydrodynamics-The Royal Institution of Naval Architects (2003)lighthilljNo ratings yet
- Bioethics SyllabusDocument10 pagesBioethics Syllabusmei_15ph83% (6)
- OSS Double-Agent Operations in World War IIDocument12 pagesOSS Double-Agent Operations in World War IIoscarherradonNo ratings yet
- Bone and Soft Tissue SarcomaDocument67 pagesBone and Soft Tissue SarcomaSalmanArifNo ratings yet
- Boss ME-10 Service ManualDocument23 pagesBoss ME-10 Service Manualmidiquasi50% (2)
- Numerical Investigation of Shallow Water Effect On A Barge Ship ResistanceDocument9 pagesNumerical Investigation of Shallow Water Effect On A Barge Ship ResistancegksahaNo ratings yet
- Resist en CIA de Barcazas RectangularesDocument5 pagesResist en CIA de Barcazas RectangularesFederico CurroNo ratings yet
- Brochure 2017 - MIT 2NDocument26 pagesBrochure 2017 - MIT 2Njwpaprk1No ratings yet
- Cornett Coastlab 14 P QDocument19 pagesCornett Coastlab 14 P QChristos AntoniadisNo ratings yet
- 68 PDFsam PMRes 2018 Special1 Kulczyk PDFDocument6 pages68 PDFsam PMRes 2018 Special1 Kulczyk PDFNiloy SahaNo ratings yet
- Quick Strip Theory Calculations in Ship Design: WWW - Shipmotions.nlDocument11 pagesQuick Strip Theory Calculations in Ship Design: WWW - Shipmotions.nlYoungkook KimNo ratings yet
- Quick Strip TheoryDocument11 pagesQuick Strip TheoryPopoo KyoNo ratings yet
- Numerical Investigating The EffectDocument9 pagesNumerical Investigating The Effectravi_4908No ratings yet
- Motion Predictions of Ships in Actual Operating CoDocument13 pagesMotion Predictions of Ships in Actual Operating Coelmariner.24No ratings yet
- Amecrc PDFDocument17 pagesAmecrc PDFshimul2008No ratings yet
- RANSE Simulations of Surface Piercing PropellersDocument5 pagesRANSE Simulations of Surface Piercing PropellershaujesNo ratings yet
- A Numerical and Experimental Study of Resistance, Trim and Sinkage of An Inland Ship Model in Extremely Shallow WatereDocument8 pagesA Numerical and Experimental Study of Resistance, Trim and Sinkage of An Inland Ship Model in Extremely Shallow WatereTat-Hien LeNo ratings yet
- Prediction of Stress Spectra Under Low-Period Sea States: Ships and Offshore StructuresDocument13 pagesPrediction of Stress Spectra Under Low-Period Sea States: Ships and Offshore StructureslapuNo ratings yet
- Numerical Investigation of Planing Hull Resistance Using Different Turbulence ModelsDocument11 pagesNumerical Investigation of Planing Hull Resistance Using Different Turbulence ModelsalsmoualNo ratings yet
- Study of Passing Ship Effects Along A Bank by Delft3D-Flow and XbeachDocument10 pagesStudy of Passing Ship Effects Along A Bank by Delft3D-Flow and XbeachCarlosNo ratings yet
- Journee PRADS92 - Quick Strip Theory Calculations in Ship DesignDocument11 pagesJournee PRADS92 - Quick Strip Theory Calculations in Ship Designumair abbasNo ratings yet
- Comparison Between Empirical Forecast Methods of Resistance To Advance and Propulsive Design of A Container ShipDocument7 pagesComparison Between Empirical Forecast Methods of Resistance To Advance and Propulsive Design of A Container ShipHuascar Brito FeijoNo ratings yet
- Quick Strip Theory Calculations in Ship DesignDocument11 pagesQuick Strip Theory Calculations in Ship Designsalman GtrNo ratings yet
- Nonlinear Time Domain Simulation TechnologyDocument26 pagesNonlinear Time Domain Simulation TechnologyTahsin TezdoganNo ratings yet
- NPL With NacaDocument18 pagesNPL With NacaMuhamad Nazren Mohamed ZaidiNo ratings yet
- Experimental and Numerical Study of A Submarine and Propeller Behaviors in Submergence and Surface ConditionsDocument12 pagesExperimental and Numerical Study of A Submarine and Propeller Behaviors in Submergence and Surface Conditionsnoor muhammadNo ratings yet
- Assessment of Ship Squat in Shallow Water Using CFDDocument10 pagesAssessment of Ship Squat in Shallow Water Using CFDSushant PandurangiNo ratings yet
- Impact of Hull Propeller Rudder Interaction On Ship Powering AssessmentDocument15 pagesImpact of Hull Propeller Rudder Interaction On Ship Powering AssessmentPedro ParenteNo ratings yet
- Numerical Simulation of Damage Ship FlooDocument6 pagesNumerical Simulation of Damage Ship FlooThanos NiotisNo ratings yet
- Planing in Extreme Conditions - Blount, Funkhouser 2009Document14 pagesPlaning in Extreme Conditions - Blount, Funkhouser 2009haujesNo ratings yet
- Slosh Baffle Design and Test For Spherical Liquid Oxygen and Liquid Methane Propellant Tank For A LanderDocument16 pagesSlosh Baffle Design and Test For Spherical Liquid Oxygen and Liquid Methane Propellant Tank For A LanderXto PeregrinNo ratings yet
- 2.an Experimental Study On The Effect of Confined Water On Resistance and Propulsion of An Inland Waterway Ship PDFDocument12 pages2.an Experimental Study On The Effect of Confined Water On Resistance and Propulsion of An Inland Waterway Ship PDFRumen KishevNo ratings yet
- Propulsion and Steering Behaviour of A Ship Equipped With Two Contra-Rotating Z-DrivesDocument8 pagesPropulsion and Steering Behaviour of A Ship Equipped With Two Contra-Rotating Z-DrivesNikolas GonzalezNo ratings yet
- Numerical Analysis of Influence of Stern Flaps On Motion and Stability of High-Speed Amphibious PlatformDocument10 pagesNumerical Analysis of Influence of Stern Flaps On Motion and Stability of High-Speed Amphibious PlatformFauzan MahadityaNo ratings yet
- CFD WaterjetDocument8 pagesCFD WaterjettafocanNo ratings yet
- Performance Prediction of A Nozzle Propeller: August 2012Document11 pagesPerformance Prediction of A Nozzle Propeller: August 2012Carlos Eduardo JaenNo ratings yet
- Influence of The Transom Immersion To Ship Resistance Components at Low and Medium SpeedsDocument19 pagesInfluence of The Transom Immersion To Ship Resistance Components at Low and Medium SpeedsMahdiNo ratings yet
- Large Diameter Propeller Emergence RiskDocument13 pagesLarge Diameter Propeller Emergence RiskMuhammad Rafiq RavinNo ratings yet
- Improving The Resistance of A Series 60 Vessel With A CFD CodeDocument14 pagesImproving The Resistance of A Series 60 Vessel With A CFD CodeIbrahim MadanNo ratings yet
- I07CCC 03hwangDocument8 pagesI07CCC 03hwangcesarNo ratings yet
- Super-Cavitating Profiles For Ultra High Speed Hydrofoils: A Hybrid CFD Design ApproachDocument13 pagesSuper-Cavitating Profiles For Ultra High Speed Hydrofoils: A Hybrid CFD Design ApproachMNirooeiNo ratings yet
- Marine Propeller Modeling and Performance Analysis Using CFD ToolsDocument11 pagesMarine Propeller Modeling and Performance Analysis Using CFD ToolsWidyahsri EllaNo ratings yet
- Ijtech Suastika Et Al 2017 BDocument10 pagesIjtech Suastika Et Al 2017 BWina KurniaNo ratings yet
- Tailieuchung 010 17 183 2303Document7 pagesTailieuchung 010 17 183 2303Mạnh Hoàng NguyễnNo ratings yet
- Seakeeping Methods Lecture - Alto UniversityDocument35 pagesSeakeeping Methods Lecture - Alto UniversityajayNo ratings yet
- M-1 KknerDocument27 pagesM-1 Kkner손기현No ratings yet
- Design of Hydrofoil UsingDocument18 pagesDesign of Hydrofoil UsingmarihomenonNo ratings yet
- Newapps ShiDocument12 pagesNewapps ShiLegend AnbuNo ratings yet
- Numerical Simulation of A Marine Propeller in A Cross Flow: Seth D. Schroeder, Charles M. DaiDocument17 pagesNumerical Simulation of A Marine Propeller in A Cross Flow: Seth D. Schroeder, Charles M. DaiAnonymous gxAd4liNo ratings yet
- 3D Numerical Analisis of Wave Floating Structure Interaction With OpenFOAM PDFDocument19 pages3D Numerical Analisis of Wave Floating Structure Interaction With OpenFOAM PDFAnonymous mv84nhzNo ratings yet
- Validation of CFD Simulations of The Flow Around A Full Scale Rowing Blade With Realistic KinematicsDocument14 pagesValidation of CFD Simulations of The Flow Around A Full Scale Rowing Blade With Realistic KinematicsValentina DiamanteNo ratings yet
- R84 p14 CRS SeakeepingDocument2 pagesR84 p14 CRS SeakeepingAna TNo ratings yet
- Nutts 01 2010 Duisburg PDFDocument153 pagesNutts 01 2010 Duisburg PDFAnaa ChiroşcăNo ratings yet
- Drag Reduction YanuarDocument12 pagesDrag Reduction YanuarBaqi_naval06No ratings yet
- FulltextDocument14 pagesFulltextThibault HugNo ratings yet
- Calculation of Bottom Clearance Effects On UV HydrodynamicsDocument25 pagesCalculation of Bottom Clearance Effects On UV Hydrodynamicshalcyon304No ratings yet
- Distributed Propulsion Systems For Shallow Draft Vessels: Marine Science and EngineeringDocument17 pagesDistributed Propulsion Systems For Shallow Draft Vessels: Marine Science and EngineeringSreekanthNo ratings yet
- Developments in The Design of Ship PropeDocument8 pagesDevelopments in The Design of Ship Prope장영훈No ratings yet
- Jmse 08 00649Document23 pagesJmse 08 00649Ruchit PathakNo ratings yet
- Szelangiewicz-Zelazny An Approximate 60-2019Document8 pagesSzelangiewicz-Zelazny An Approximate 60-2019Mohamad JammalNo ratings yet
- 03 Sname Integrated Simulation System For PropellerDocument16 pages03 Sname Integrated Simulation System For PropellerJ T Mendonça SantosNo ratings yet
- Comparative Analysis Results of Towing Tank and Numerical Calculations With Harvald Guldammer MethodDocument10 pagesComparative Analysis Results of Towing Tank and Numerical Calculations With Harvald Guldammer MethodTat-Hien LeNo ratings yet
- 2013 - 53 - EU Recreational Craft - Summary List of Harmonised Standards - Generated On 19.10.2022Document16 pages2013 - 53 - EU Recreational Craft - Summary List of Harmonised Standards - Generated On 19.10.2022Tat-Hien LeNo ratings yet
- QuatDocument14 pagesQuatTat-Hien LeNo ratings yet
- Predicting Ship Hydrodynamic Performance in Today WorldDocument8 pagesPredicting Ship Hydrodynamic Performance in Today WorldTat-Hien LeNo ratings yet
- Ñieàu Chænh Toác Ñoä Ñoäng Cô DCDocument19 pagesÑieàu Chænh Toác Ñoä Ñoäng Cô DCTat-Hien LeNo ratings yet
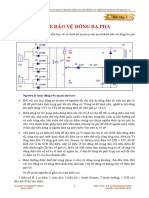
- Rôle Baûo Veä Doøng Ba Pha: Nguyeân Lyù Hoaït Ñoäng Cuûa Maïch Nhö SauDocument25 pagesRôle Baûo Veä Doøng Ba Pha: Nguyeân Lyù Hoaït Ñoäng Cuûa Maïch Nhö SauTat-Hien LeNo ratings yet
- Improving The Accuracy of Ship Resistance Prediction Using Computational Fluid Dynamics ToolDocument7 pagesImproving The Accuracy of Ship Resistance Prediction Using Computational Fluid Dynamics ToolTat-Hien LeNo ratings yet
- PengYon Nov2012 8233Document156 pagesPengYon Nov2012 8233Tat-Hien LeNo ratings yet
- A Hybrid Solver Based On Efficient BEM-potential and LBM-NS Models Recent LBM Developments and Applications To Naval HydrodynamicsDocument8 pagesA Hybrid Solver Based On Efficient BEM-potential and LBM-NS Models Recent LBM Developments and Applications To Naval HydrodynamicsTat-Hien LeNo ratings yet
- A Numerical and Experimental Study of Resistance, Trim and Sinkage of An Inland Ship Model in Extremely Shallow WatereDocument8 pagesA Numerical and Experimental Study of Resistance, Trim and Sinkage of An Inland Ship Model in Extremely Shallow WatereTat-Hien LeNo ratings yet
- Prediction of Shallow Water Resistance For A New Ship Model Using CFD Simulation Case Study Container BargeDocument10 pagesPrediction of Shallow Water Resistance For A New Ship Model Using CFD Simulation Case Study Container BargeTat-Hien LeNo ratings yet
- Dimensional Constraints in Ship DesignDocument6 pagesDimensional Constraints in Ship DesignTat-Hien LeNo ratings yet
- BANK SOAL-fixDocument24 pagesBANK SOAL-fixjasaku cleNo ratings yet
- Lesson Plan For Hindu Ideals and Idols For Students - A Textbook For Introducing Hindu Values (Vishal Agarwal, 2012)Document5 pagesLesson Plan For Hindu Ideals and Idols For Students - A Textbook For Introducing Hindu Values (Vishal Agarwal, 2012)kalyan974696No ratings yet
- Saint Patapios of Thebes and His Monastery in Loutraki PDFDocument5 pagesSaint Patapios of Thebes and His Monastery in Loutraki PDFgandalfthereader2130No ratings yet
- The Economic Way of ThinkingDocument9 pagesThe Economic Way of ThinkingMadalina CalanceNo ratings yet
- Dyck CommentaryDocument32 pagesDyck CommentaryRichardNo ratings yet
- I Wonder PoemDocument9 pagesI Wonder PoemPaakkialetchumi NarainasamyNo ratings yet
- Marketing Strategy of A Global Brand - Samsung MobileDocument23 pagesMarketing Strategy of A Global Brand - Samsung Mobileratul_oneNo ratings yet
- Chapter 7Document20 pagesChapter 7shakirah277No ratings yet
- People v. CervantesDocument7 pagesPeople v. CervantesRodney AtibulaNo ratings yet
- General Survey, Mental Status Exam, andDocument25 pagesGeneral Survey, Mental Status Exam, andjazzreign50% (2)
- Academic Journal of Interdisciplinary Studies MCSER Publishing, Rome-ItalyDocument8 pagesAcademic Journal of Interdisciplinary Studies MCSER Publishing, Rome-ItalyБаш ЧеликNo ratings yet
- Calcination of Nickel-Alumina CatalystsDocument4 pagesCalcination of Nickel-Alumina CatalystsAnonymous 4PuFzAR100% (1)
- How To Close A Loop in CAEPIPEDocument7 pagesHow To Close A Loop in CAEPIPEalmustanir_903004759No ratings yet
- Annals of Medicine and Surgery: Cross-Sectional StudyDocument6 pagesAnnals of Medicine and Surgery: Cross-Sectional StudyAbdullah Ali BakshNo ratings yet
- Exercises Position of AdverbsDocument4 pagesExercises Position of AdverbsOana RomanNo ratings yet
- Motion NCert SolutionDocument23 pagesMotion NCert SolutionRamKumarSharmaNo ratings yet
- Labor Relations - Atty. Santamaria Up To Article 302 (2018)Document72 pagesLabor Relations - Atty. Santamaria Up To Article 302 (2018)IshNo ratings yet
- Student Protfolio in Work ImmersionDocument6 pagesStudent Protfolio in Work ImmersionRochelle Beatriz MapanaoNo ratings yet
- 7 Major Elements of Communication ProcessDocument2 pages7 Major Elements of Communication ProcessEarl John Fajarito Rafael100% (3)
- Learning Activity 5.2 Concept ReviewDocument4 pagesLearning Activity 5.2 Concept ReviewJames CantorneNo ratings yet
- A2Document33 pagesA2Anmol GoswamiNo ratings yet
- I - Multiple Choice Questions (45%) : Lebanese Association of Certified Public Accountants - AUDIT October Exam 2016Document11 pagesI - Multiple Choice Questions (45%) : Lebanese Association of Certified Public Accountants - AUDIT October Exam 2016Kryzzel Anne JonNo ratings yet
- 2 ND Bit Coin White PaperDocument17 pages2 ND Bit Coin White PaperReid DouthatNo ratings yet
- Juris 6Document14 pagesJuris 6Gabriel EmersonNo ratings yet
- Self-Assessment 9.8: For Each Learning Objective, Tick ( ) The Box That Best Matches Your AbilityDocument1 pageSelf-Assessment 9.8: For Each Learning Objective, Tick ( ) The Box That Best Matches Your AbilityКатерина КравченкоNo ratings yet
- CV Christian HermanusDocument10 pagesCV Christian HermanusDesign WENo ratings yet