Download as docx, pdf, or txt
You might also like
- 08.30.23 - Exhibit H 3 - BESS Commissioning RequirementsDocument3 pages08.30.23 - Exhibit H 3 - BESS Commissioning RequirementsCraig Stager100% (1)
- Keywords: SEPIC Converter, PID Controller, Microcontroller, PIC18F4550, DC-DC PowerDocument16 pagesKeywords: SEPIC Converter, PID Controller, Microcontroller, PIC18F4550, DC-DC PowerHatem MezaacheNo ratings yet
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- Modelling and Advance Control Techniques For DC-DC Converter With Improve PerformanceDocument4 pagesModelling and Advance Control Techniques For DC-DC Converter With Improve PerformanceerpublicationNo ratings yet
- Fuzzy Logic Controlled Bidirectional DC-DC Converter Applied To DC DriveDocument12 pagesFuzzy Logic Controlled Bidirectional DC-DC Converter Applied To DC DriveTJPRC PublicationsNo ratings yet
- A Transformerless Buck-Boost Converter With PID ControllerDocument7 pagesA Transformerless Buck-Boost Converter With PID ControllerSohaib ChoudharyNo ratings yet
- Addis Ababa Science & Techenology UniverstyDocument5 pagesAddis Ababa Science & Techenology Universtyfiraol temesgenNo ratings yet
- Cep PeDocument25 pagesCep PeJaveriaNo ratings yet
- Buck Boost ProjectDocument24 pagesBuck Boost ProjectRonald LugwireNo ratings yet
- Control BLDC Motor Speed Using PID ControllerDocument5 pagesControl BLDC Motor Speed Using PID ControllerAbhay JangirNo ratings yet
- Ijca March 2012 OhgDocument18 pagesIjca March 2012 OhgDr O H GuptaNo ratings yet
- Closed Loop Operation of Buck DC-DC Converter Using Discrete Pi ControlDocument4 pagesClosed Loop Operation of Buck DC-DC Converter Using Discrete Pi ControlPrajeesh PrakashNo ratings yet
- A Closed Loop Control Strategy of Transformer-Less Buck-Boost Converter With PID ControllerDocument7 pagesA Closed Loop Control Strategy of Transformer-Less Buck-Boost Converter With PID Controllerbhawna guptaNo ratings yet
- Project SynopsisDocument6 pagesProject SynopsisDeepakVyas0% (1)
- Buck Converter Menawarkan Efisiensi Yang Lebih Baik Bila Dibandingkan DenganDocument2 pagesBuck Converter Menawarkan Efisiensi Yang Lebih Baik Bila Dibandingkan DenganFaisal AhcmadNo ratings yet
- Design and Implementation of 12V/24V Closed Loop Boost Converter For Solar Powered LED Lighting SystemDocument11 pagesDesign and Implementation of 12V/24V Closed Loop Boost Converter For Solar Powered LED Lighting Systemسعيد ابوسريعNo ratings yet
- ADITIDocument38 pagesADITIgarima pariyaniNo ratings yet
- Design, Modelling and Implementation of Interleaved Boost DC-DC ConverterDocument13 pagesDesign, Modelling and Implementation of Interleaved Boost DC-DC ConverterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Aqw PDFDocument5 pagesAqw PDFnjmnjkNo ratings yet
- 3.automated Transformer Coil Winding MachineDocument31 pages3.automated Transformer Coil Winding Machinecelphone533No ratings yet
- Energies: Fractional-Order Approximation and Synthesis of A PID Controller For A Buck ConverterDocument17 pagesEnergies: Fractional-Order Approximation and Synthesis of A PID Controller For A Buck Converterkarim belaliaNo ratings yet
- CanonicalDocument7 pagesCanonicalTechnos_IncNo ratings yet
- Digital Linear and Nonlinear Controllers For Buck Converter: Shyama M, P.SwaminathanDocument7 pagesDigital Linear and Nonlinear Controllers For Buck Converter: Shyama M, P.SwaminathanFABIANCHO2210No ratings yet
- Design and Simulation of DC DC Boost ConverterDocument11 pagesDesign and Simulation of DC DC Boost ConverterHãrshã SmîlęýNo ratings yet
- PFC DC-DCDocument8 pagesPFC DC-DCmanda RamuNo ratings yet
- Speed Control of DC Motor Using Pid Controller BasedDocument16 pagesSpeed Control of DC Motor Using Pid Controller Basedayesha amjadNo ratings yet
- Bi Directional ImpDocument6 pagesBi Directional Impkan_2014No ratings yet
- DC-DC Voltage ConverterDocument14 pagesDC-DC Voltage ConverterasifNo ratings yet
- DC/DC Converter Control Using Suggested Artificial Intelligent ControllersDocument11 pagesDC/DC Converter Control Using Suggested Artificial Intelligent ControllersIAES IJAINo ratings yet
- A Feedback Linearizing Control Scheme For ADocument8 pagesA Feedback Linearizing Control Scheme For AFatih BurakNo ratings yet
- IJETR2228Document7 pagesIJETR2228anil kasotNo ratings yet
- High Voltage Gain, High Step Up DC-DC ConverterDocument23 pagesHigh Voltage Gain, High Step Up DC-DC ConverterRakesh Kumar100% (1)
- Advanced Control System Lab PDFDocument15 pagesAdvanced Control System Lab PDFarpitg2208No ratings yet
- Performance Estimation of Tristate DC-DC Buck Converter With Fixed Frequency and Constant Switching Hysteresis ControlDocument10 pagesPerformance Estimation of Tristate DC-DC Buck Converter With Fixed Frequency and Constant Switching Hysteresis ControleditorijaiemNo ratings yet
- Performance Analysis of Fuzzy Logic Controlled DC-DC Converters - OKDocument7 pagesPerformance Analysis of Fuzzy Logic Controlled DC-DC Converters - OKREYES APOLONIO CASTRO CORRALNo ratings yet
- Direct Digital Control of Single-Phase AC/DC PWM Converter SystemDocument10 pagesDirect Digital Control of Single-Phase AC/DC PWM Converter SystemPham LongNo ratings yet
- 23D AdvanceDocument8 pages23D AdvancePATEL SWAPNEELNo ratings yet
- Design and Execution of A DC Source With High Power and High EfficiencyDocument19 pagesDesign and Execution of A DC Source With High Power and High EfficiencyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Non-Linear Predictive Control of A DC-to-DC ConverterDocument5 pagesNon-Linear Predictive Control of A DC-to-DC ConvertermenguemengueNo ratings yet
- DC Motor Speed Control Using Microcontroller: AbstractDocument5 pagesDC Motor Speed Control Using Microcontroller: AbstractGabi CiobanuNo ratings yet
- AarthiDocument10 pagesAarthiSoniya CsNo ratings yet
- Introduction To DC-DC ConverterDocument5 pagesIntroduction To DC-DC ConverterB ANIL KUMARNo ratings yet
- Project: Solar Powered Induction Motor DriveDocument75 pagesProject: Solar Powered Induction Motor DriveDebanjan ChatterjeeNo ratings yet
- v4 342 349 PDFDocument8 pagesv4 342 349 PDFGlan DevadhasNo ratings yet
- Dynamic Evolution Control For Three-Level DC-DC Converter With Supercapacitor SystemDocument5 pagesDynamic Evolution Control For Three-Level DC-DC Converter With Supercapacitor SystemPhan QuyếtNo ratings yet
- Speed Control of A 2HP DC MotorDocument25 pagesSpeed Control of A 2HP DC MotorEdul BrianNo ratings yet
- A Matlahsimulink Tool For Power Converters Teaching A Power FacDocument5 pagesA Matlahsimulink Tool For Power Converters Teaching A Power FacRAJAN M SNo ratings yet
- Microsoft Word - 11-11-008 PDFDocument10 pagesMicrosoft Word - 11-11-008 PDFbhulakshmideviNo ratings yet
- DCDCDocument10 pagesDCDCilet09No ratings yet
- DC Motor Speed Control Using Pid ControllerDocument9 pagesDC Motor Speed Control Using Pid ControllerWahyu SaputroNo ratings yet
- DCto DCBoost Converterusing 555 Timer ICDocument7 pagesDCto DCBoost Converterusing 555 Timer ICengpower20m196No ratings yet
- Full Control of A PWM DCAC Converter For AC Voltage RegulationDocument9 pagesFull Control of A PWM DCAC Converter For AC Voltage RegulationAndrés Felipe CelisNo ratings yet
- A Buck Converter Based On PID Controller For Voltage Step - Down Application.... Trae Un Circuito Buck Aplicado en MatlabDocument4 pagesA Buck Converter Based On PID Controller For Voltage Step - Down Application.... Trae Un Circuito Buck Aplicado en MatlabDavid RomeroNo ratings yet
- Literature Review of Speed Control of DC MotorDocument8 pagesLiterature Review of Speed Control of DC Motoraflsmceoc100% (1)
- Design and Simulations of Sliding Mode Controller For DC-DC Buck ConverterDocument8 pagesDesign and Simulations of Sliding Mode Controller For DC-DC Buck ConverteryoucefNo ratings yet
- Proposal PresentationDocument13 pagesProposal PresentationTentinay HizkielNo ratings yet
- Closed Sepic1Document6 pagesClosed Sepic1Thimothy BasavaNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- Modern Control of DC-Based Power Systems: A Problem-Based ApproachFrom EverandModern Control of DC-Based Power Systems: A Problem-Based ApproachNo ratings yet
- EP-61014 Electrical Safety Assignment-IIIDocument1 pageEP-61014 Electrical Safety Assignment-IIIBart llNo ratings yet
- PID ControllerDocument3 pagesPID ControllerBart llNo ratings yet
- EP-61014 Electrical Safety Assignment-II: TH THDocument3 pagesEP-61014 Electrical Safety Assignment-II: TH THBart llNo ratings yet
- EP-61014 Electrical Safety Assignment-IDocument1 pageEP-61014 Electrical Safety Assignment-IBart llNo ratings yet
- Energies: Linearized Discrete Charge Balance Control With Simplified Algorithm For DCM Buck ConverterDocument17 pagesEnergies: Linearized Discrete Charge Balance Control With Simplified Algorithm For DCM Buck ConverterBart llNo ratings yet
- Fuzzy Logic Control of A Switched-Inductor DC-DC Buck Converter in CCMDocument64 pagesFuzzy Logic Control of A Switched-Inductor DC-DC Buck Converter in CCMBart llNo ratings yet
- Transfer Function and Controller DesignDocument14 pagesTransfer Function and Controller DesignBart llNo ratings yet
- Dervisic - Engström - Electric Infrastructure For Electrolyser SystemsDocument142 pagesDervisic - Engström - Electric Infrastructure For Electrolyser SystemssimoneNo ratings yet
- Wind Turbine Power Calculations: College of Energy Technologies JikharraDocument5 pagesWind Turbine Power Calculations: College of Energy Technologies Jikharraأيمن الكزةNo ratings yet
- Bee Project Detials Sem I (2020-21)Document1 pageBee Project Detials Sem I (2020-21)Sb creationNo ratings yet
- A Study of A Phase Change Material (PCM) As A Cooling Material For Solar PVDocument3 pagesA Study of A Phase Change Material (PCM) As A Cooling Material For Solar PVJeremyJohnNo ratings yet
- Tietzsch Voltagetesters ENGDocument32 pagesTietzsch Voltagetesters ENGJulian Hanggara AdigunaNo ratings yet
- P.011690 - Zambia SPV 47.5MW Relay Setting ReportDocument22 pagesP.011690 - Zambia SPV 47.5MW Relay Setting ReportAshutosh SharmaNo ratings yet
- Ele Lab ManualDocument10 pagesEle Lab ManualMothxNinjaNo ratings yet
- Comparison of Various Types of Power PlantsDocument2 pagesComparison of Various Types of Power PlantsEslam El-garawanyNo ratings yet
- Edplc MCQ QuesDocument5 pagesEdplc MCQ Quesbhav tech vinesNo ratings yet
- Form A 1 Agricultural PDFDocument5 pagesForm A 1 Agricultural PDFrajeshNo ratings yet
- Velocity: Topic 11.1 & 11.2: Electromagnetic Induction & Power Generation and Transmission 1Document8 pagesVelocity: Topic 11.1 & 11.2: Electromagnetic Induction & Power Generation and Transmission 1user2No ratings yet
- Insulation and Manufacturing Process of 500 MW Turbo GeneratorDocument28 pagesInsulation and Manufacturing Process of 500 MW Turbo Generatortechcare123No ratings yet
- PSPCLDocument1 pagePSPCLRanjodh KaurNo ratings yet
- CBLM Test Electronic ComponentDocument54 pagesCBLM Test Electronic ComponentWiljhon Espinola JulapongNo ratings yet
- Input/Output: The Power To Change..Document2 pagesInput/Output: The Power To Change..danielliram993No ratings yet
- Applications and Characteristics of Overcurrent Relays (ANSI 50, 51)Document6 pagesApplications and Characteristics of Overcurrent Relays (ANSI 50, 51)catalinccNo ratings yet
- Chapter 7 Induction Machines-EEE301Document96 pagesChapter 7 Induction Machines-EEE301DilekNo ratings yet
- Power Engineering Advances and Challenges. Part A Thermal, Hydro and Nuclear Power by Viorel Badescu, George Cristian Lazaroiu, Linda BarelliDocument458 pagesPower Engineering Advances and Challenges. Part A Thermal, Hydro and Nuclear Power by Viorel Badescu, George Cristian Lazaroiu, Linda BarelliJennifer Cunico100% (1)
- Unit IVDocument53 pagesUnit IVRiya KateNo ratings yet
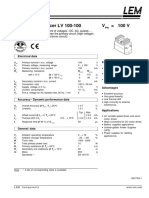
- Lem Voltage 100-500Document2 pagesLem Voltage 100-500hieuhuech1No ratings yet
- The Synchronous Motor I. ObjectivesDocument4 pagesThe Synchronous Motor I. ObjectivesArnel Pamaos Lopiba MontañezNo ratings yet
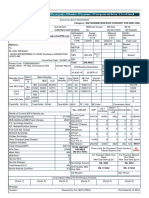
- ApplCA057 82.5kVA 3PHDocument5 pagesApplCA057 82.5kVA 3PHRajesh KumarNo ratings yet
- Scott ConnectionDocument3 pagesScott Connectionjagdishmore911No ratings yet
- Performing Live-Circuit Installation Tests With A Fluke 1650 Series Tester On An IT-systemDocument8 pagesPerforming Live-Circuit Installation Tests With A Fluke 1650 Series Tester On An IT-systemSocrates Vega VerduguezNo ratings yet
- Chapter Three TransformersDocument25 pagesChapter Three Transformersعلي رياضNo ratings yet
- Ec NotesDocument16 pagesEc NotesShubham RajNo ratings yet
- Eplacing Elenium Ectifiers: Other Benefits BackgroundDocument6 pagesEplacing Elenium Ectifiers: Other Benefits BackgroundAniello IaccarinoNo ratings yet
- Daftar Standard 18 10 2013Document7 pagesDaftar Standard 18 10 2013Mochammad Sholichudin0% (1)
- Capacitor Multiple ChoiceDocument9 pagesCapacitor Multiple ChoiceabdulfcNo ratings yet