Download as docx, pdf, or txt
You might also like
- Bitcoin To $1M, Ethereum To $180,000 by 2030 ARKDocument1 pageBitcoin To $1M, Ethereum To $180,000 by 2030 ARKOwen HalpertNo ratings yet
- QPSK MatcodeDocument3 pagesQPSK MatcodeDeepak KrishnanNo ratings yet
- (9789004316171 - Rashda - The Birth and Growth of An Egyptian Oasis Village) Rashda - The Birth and Growth of An Egyptian Oasis VillageDocument322 pages(9789004316171 - Rashda - The Birth and Growth of An Egyptian Oasis Village) Rashda - The Birth and Growth of An Egyptian Oasis VillageMarija RadjaNo ratings yet
- MatlabDocument25 pagesMatlabMuhammad TayyabNo ratings yet
- Experiment No: 13 Transient and Steady State Response AnalysisDocument28 pagesExperiment No: 13 Transient and Steady State Response Analysisayesha amjadNo ratings yet
- DSP PracticalDocument25 pagesDSP PracticalDurgesh DhoreNo ratings yet
- Digitalcom Lab Manual NewDocument26 pagesDigitalcom Lab Manual NewAkanksha DixitNo ratings yet
- DSP Lab ExamDocument7 pagesDSP Lab ExamUzair AhmedNo ratings yet
- Matlab LectureDocument6 pagesMatlab Lecturekafle_yrsNo ratings yet
- CT 303 Digital Communications Lab 9: Heer Gohil 201901135Document25 pagesCT 303 Digital Communications Lab 9: Heer Gohil 201901135H GNo ratings yet
- Final CSDocument28 pagesFinal CSkvbrothers2004No ratings yet
- hw2 SolDocument11 pageshw2 SolSaied Aly SalamahNo ratings yet
- Matlab Program: 1 Response of First Order System To Unit Step InputDocument6 pagesMatlab Program: 1 Response of First Order System To Unit Step InputMartin De Boras PragashNo ratings yet
- Advanced Control Lab (Ee-21321) Experiment No: 02: % Continuous Time Transfer Function %Document3 pagesAdvanced Control Lab (Ee-21321) Experiment No: 02: % Continuous Time Transfer Function %Sudhakar KumarNo ratings yet
- Acom SW Lab XptsDocument21 pagesAcom SW Lab XptsAbhijithNairNo ratings yet
- DSP Lab ManualDocument20 pagesDSP Lab ManualRavi RavikiranNo ratings yet
- Umesh Sinha Communication System LabDocument67 pagesUmesh Sinha Communication System LabAbhay SinhaNo ratings yet
- 제출용Document28 pages제출용kijmm0997No ratings yet
- Experiment # 7: Theory: ( (%% Graph of Response of Second Order System For Unit Step Input and Definition ofDocument2 pagesExperiment # 7: Theory: ( (%% Graph of Response of Second Order System For Unit Step Input and Definition ofVarunNo ratings yet
- MATLAB Full Lab ReportDocument30 pagesMATLAB Full Lab ReportactuatorNo ratings yet
- Lab#9: Steady State Error Analysis and DesignDocument9 pagesLab#9: Steady State Error Analysis and DesignHammad SattiNo ratings yet
- % File NVD4B - Sim1.m: FunctionDocument9 pages% File NVD4B - Sim1.m: FunctionNguyễn Vũ Minh ViệtNo ratings yet
- Zero Forcing, LmsDocument4 pagesZero Forcing, LmsImmanuel Vinoth100% (1)
- Laboratory in Automatic Control: Lab 5 System PerformanceDocument20 pagesLaboratory in Automatic Control: Lab 5 System PerformancenchubcclNo ratings yet
- Lab 8 - 084Document6 pagesLab 8 - 084Ashar AsifNo ratings yet
- MATLAB Source CodesDocument6 pagesMATLAB Source CodesArief YazidNo ratings yet
- Worksheet-03: All AllDocument11 pagesWorksheet-03: All AllfghreihghNo ratings yet
- SS Practical (18) .Document21 pagesSS Practical (18) .Mayur ChavanNo ratings yet
- Experiment number:-TF To SSDocument2 pagesExperiment number:-TF To SSSachin ShendeNo ratings yet
- % 1km/h Doi Sang M/sDocument18 pages% 1km/h Doi Sang M/sHuyNo ratings yet
- Cycle 1 DclabDocument30 pagesCycle 1 Dclabmd salmanNo ratings yet
- Mob Computing LABDocument13 pagesMob Computing LABDinesh SharmaNo ratings yet
- Handout Matlab Lect4Document6 pagesHandout Matlab Lect4Niraj PSNo ratings yet
- DSP Lab3Document12 pagesDSP Lab3Phạm Nguyễn Hoàng SaNo ratings yet
- DSP Record EndDocument91 pagesDSP Record Endpapa pepaamNo ratings yet
- Lab 9Document3 pagesLab 9naeemhuzaifah0No ratings yet
- Assignmnet 2Document8 pagesAssignmnet 2Siddhi SudkeNo ratings yet
- Using MATLAB For Dynamic Process Behavior AnalysisDocument2 pagesUsing MATLAB For Dynamic Process Behavior AnalysisHyukLadezaNo ratings yet
- SS PracticalDocument20 pagesSS PracticalMayur ChavanNo ratings yet
- University of Southeastern PhilippinesDocument25 pagesUniversity of Southeastern PhilippinesOmosay Gap ElgyzonNo ratings yet
- List of Simulation Experiments For Analog Modulation TechniquesDocument27 pagesList of Simulation Experiments For Analog Modulation TechniquesNishantKumarNo ratings yet
- CS2ASSIGNMENTDocument16 pagesCS2ASSIGNMENTalokb210846eeNo ratings yet
- Constanta Depi MatlabDocument7 pagesConstanta Depi MatlabAdrian HurmuzNo ratings yet
- Function Normxcorr2Document3 pagesFunction Normxcorr2informal77No ratings yet
- Experiment # 13: Transient and Steady State Response AnalysisDocument19 pagesExperiment # 13: Transient and Steady State Response AnalysisHafeez AliNo ratings yet
- SCilab LAb ReportDocument26 pagesSCilab LAb ReportVilayat AliNo ratings yet
- Simulation Experiments With OutputDocument12 pagesSimulation Experiments With OutputmayilmuruganxeroxNo ratings yet
- Digital Communication Systems Lab Software: Meghna Rattanpal 17BEC0580Document19 pagesDigital Communication Systems Lab Software: Meghna Rattanpal 17BEC0580natasha SharmaNo ratings yet
- Matlab Code For Basic DSP Signals MATLAB PROGRAM TO DISPLAY THE PROPERTIES OF DISCRETE FOURIER TRANSFORM (DFT)Document16 pagesMatlab Code For Basic DSP Signals MATLAB PROGRAM TO DISPLAY THE PROPERTIES OF DISCRETE FOURIER TRANSFORM (DFT)Sabithkk2007No ratings yet
- CS - Exp8 2021200115Document5 pagesCS - Exp8 2021200115sridhar sundarNo ratings yet
- DSP Lab Manual Final Presidency UniversityDocument58 pagesDSP Lab Manual Final Presidency UniversitySUNIL KUMAR0% (1)
- Satyam Singh (SNS Lab File)Document27 pagesSatyam Singh (SNS Lab File)Kumar RajeshwarNo ratings yet
- KP21OCTDocument16 pagesKP21OCThr.rayhmanNo ratings yet
- Experiment No. 1 AIM: MATLAB Code To Perform ASK (Amplitude Shift Keying) Modulation and DemodulationDocument25 pagesExperiment No. 1 AIM: MATLAB Code To Perform ASK (Amplitude Shift Keying) Modulation and DemodulationArundhati ChaudhariNo ratings yet
- Delta and Adaptive Delta ModulationDocument6 pagesDelta and Adaptive Delta Modulationabc abcNo ratings yet
- Vea Pa Que Se Entretenga AprendiendoDocument24 pagesVea Pa Que Se Entretenga AprendiendoJoseph Borja HernandezNo ratings yet
- DSP Lab ManualDocument51 pagesDSP Lab ManualShahin4220No ratings yet
- Dayalbagh Educational Institute (Deemed University), Agra: Experiment 2 TitleDocument8 pagesDayalbagh Educational Institute (Deemed University), Agra: Experiment 2 TitleAkizuki TakaoNo ratings yet
- Assignment2 Am56303Document20 pagesAssignment2 Am56303Anuj SaidNo ratings yet
- Introduction To Communication Systems Practicals: Name: Tejas Bobade PRN: 20210802198Document13 pagesIntroduction To Communication Systems Practicals: Name: Tejas Bobade PRN: 20210802198Divyansh UmareNo ratings yet
- 2177 - MD Sadique AnsariDocument17 pages2177 - MD Sadique AnsariMD Sadique AnsariNo ratings yet
- Commitment of Combined Cycle Plants Using A Dual Optimization-Dynamic Programming ApproachDocument10 pagesCommitment of Combined Cycle Plants Using A Dual Optimization-Dynamic Programming ApproachAkash Ranjan SahooNo ratings yet
- Unit Commitment With Flexible Generating Units: Bo Lu, Member, IEEE, and Mohammad Shahidehpour, Fellow, IEEEDocument13 pagesUnit Commitment With Flexible Generating Units: Bo Lu, Member, IEEE, and Mohammad Shahidehpour, Fellow, IEEEAkash Ranjan SahooNo ratings yet
- Provisional Estimates of Subscribers by Age As Per Epfo Records (In Numbers) (A) Total During September 2017 - March 2018Document7 pagesProvisional Estimates of Subscribers by Age As Per Epfo Records (In Numbers) (A) Total During September 2017 - March 2018Akash Ranjan SahooNo ratings yet
- AlternatorDocument30 pagesAlternatorAkash Ranjan SahooNo ratings yet
- Sas+ O.Stj13, - 0S-Fa2: D. S-V-1XlyDocument2 pagesSas+ O.Stj13, - 0S-Fa2: D. S-V-1XlyAkash Ranjan SahooNo ratings yet
- Addition of Green Tea Extract in Fructose Egg Yolk Milk Diluter On The Quality and Antioxidant ContenDocument9 pagesAddition of Green Tea Extract in Fructose Egg Yolk Milk Diluter On The Quality and Antioxidant Conten3129 NashihahNo ratings yet
- AccurioLabel 400 - Basic - Demo - Script - v1.0 - EDocument33 pagesAccurioLabel 400 - Basic - Demo - Script - v1.0 - EDiego LanderosNo ratings yet
- Unit 3Document37 pagesUnit 3venkateswaran k.sNo ratings yet
- Seal of History Our Inheritance in The Great Seal of USDocument207 pagesSeal of History Our Inheritance in The Great Seal of USAlfred E. NewmanNo ratings yet
- High Voltage Testing Measurement Equipment CatalogDocument46 pagesHigh Voltage Testing Measurement Equipment CatalogHari HidayatNo ratings yet
- Turbine Cat SolarDocument2 pagesTurbine Cat SolarAbid Lakhani100% (1)
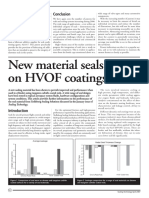
- New Material Seals Better On HVOF CoatingsDocument2 pagesNew Material Seals Better On HVOF Coatingssandbad2100% (2)
- KidWise Congo Play SetsDocument16 pagesKidWise Congo Play Setsmlc100No ratings yet
- Foundation Fieldbus Manual (Allen Bradley)Document184 pagesFoundation Fieldbus Manual (Allen Bradley)Thia Dewi Ratnasari100% (1)
- Dip & StrikeDocument20 pagesDip & StrikeSajjad AzizNo ratings yet
- HIPPROSTHESISCATALOGDocument98 pagesHIPPROSTHESISCATALOGBrenda Martinez RomanNo ratings yet
- Guia de Aprendizaje-QuantifiersDocument8 pagesGuia de Aprendizaje-Quantifiersangelita berdugoNo ratings yet
- Table of Fundamental Constants in Theoretical PhysicsDocument1 pageTable of Fundamental Constants in Theoretical PhysicsTunarisNo ratings yet
- Potassium AcetateDocument1 pagePotassium Acetaterushikesh pandyaNo ratings yet
- Before Women Had WingsDocument5 pagesBefore Women Had WingsGianna RamirezNo ratings yet
- Questionnaire CementDocument4 pagesQuestionnaire CementMere HamsafarNo ratings yet
- Peugeot 206 P Dag Owners ManualDocument119 pagesPeugeot 206 P Dag Owners ManualAlex Rojas AguilarNo ratings yet
- Wastewater Surveillance of Pathogens Can Inform Public Health ResponsesDocument4 pagesWastewater Surveillance of Pathogens Can Inform Public Health ResponsesMiriam LeiNo ratings yet
- Instrumentation Cables: Product CatalogueDocument44 pagesInstrumentation Cables: Product Cataloguexinying liuNo ratings yet
- Yr1 Mid-Year Assessment - Model Test - AnswersDocument2 pagesYr1 Mid-Year Assessment - Model Test - AnswersNieda NorNo ratings yet
- Building Utilities 3 - FUNDAMENTALSDocument2 pagesBuilding Utilities 3 - FUNDAMENTALSMarkdanielRamiterreNo ratings yet
- ACT Math Formulas To MemorizeDocument1 pageACT Math Formulas To MemorizeRack OsMaNo ratings yet
- Bài Tập Starter Unit Phần 2Document12 pagesBài Tập Starter Unit Phần 2vy nguyễnNo ratings yet
- Vitamin E, Wonder Worker of The 70'S - Adams, Ruth, 1911 - Murray, FrankDocument132 pagesVitamin E, Wonder Worker of The 70'S - Adams, Ruth, 1911 - Murray, FrankAnonymous gwFqQcnaXNo ratings yet
- Lectura Ingles Grado 5ºDocument3 pagesLectura Ingles Grado 5ºEdinson Prado MurilloNo ratings yet
- Battery-Box Hvs / HVM: PremiumDocument2 pagesBattery-Box Hvs / HVM: PremiumIulian GrigoreNo ratings yet
- Excel Meracik Nutrisi Bandung 11 Feb 2018Document30 pagesExcel Meracik Nutrisi Bandung 11 Feb 2018Ariev WahyuNo ratings yet
- 978 1 5275 0785 2 SampleDocument30 pages978 1 5275 0785 2 SampleJacob AlonzoNo ratings yet