Download as pdf or txt
You might also like
- Solution Manual For Advanced Engineering Thermodynamics 4th Ed Adrian Bejan PDFDocument25 pagesSolution Manual For Advanced Engineering Thermodynamics 4th Ed Adrian Bejan PDFأحمد محسن خضير خلفNo ratings yet
- 1 Tan Tan 1Document15 pages1 Tan Tan 1Ajay HoodaNo ratings yet
- Tower DesignDocument15 pagesTower DesignKushan Dhanushka Nanayakkara100% (2)
- Lecture 7 SD Single Degree of Freedom (SDOF) System (6) Harmonic LoadingDocument38 pagesLecture 7 SD Single Degree of Freedom (SDOF) System (6) Harmonic LoadingSarose PrajapatiNo ratings yet
- IV. Analysis of SDOF Systems (Or Modal Equations) : Term 1, 2020Document27 pagesIV. Analysis of SDOF Systems (Or Modal Equations) : Term 1, 2020Faiz MalikNo ratings yet
- Bode Plots: 1 Control Lectures by Lubn MoinDocument30 pagesBode Plots: 1 Control Lectures by Lubn MoinSadaqat RizviNo ratings yet
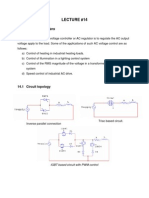
- Lecture #14: AC Voltage ControllersDocument14 pagesLecture #14: AC Voltage ControllersMat SahNo ratings yet
- GATE AEROSPACE Engineering Compressible Fluid FlowDocument11 pagesGATE AEROSPACE Engineering Compressible Fluid FlowAshok KumarNo ratings yet
- Lecture 2bDocument12 pagesLecture 2bYusuf GulNo ratings yet
- Time Response 1Document16 pagesTime Response 1Nik JaffNo ratings yet
- Electrical Sciences EEE F111Document39 pagesElectrical Sciences EEE F111Kriti TambareNo ratings yet
- Second-Order Systems: Circuits ElectronicsDocument19 pagesSecond-Order Systems: Circuits ElectronicsMitpdfNo ratings yet
- ME 131B Fluid Mechanics Solutions To Week Four Problem Session: Normal ShockDocument16 pagesME 131B Fluid Mechanics Solutions To Week Four Problem Session: Normal ShockPablo LazoNo ratings yet
- Bode Plots-Lecture 1Document31 pagesBode Plots-Lecture 1sfjhsakjfhNo ratings yet
- Time Response AnalysisDocument57 pagesTime Response AnalysisAbdelnasirNo ratings yet
- GCL 06Document26 pagesGCL 06sahanishubham317No ratings yet
- Thermodynamics: The Boundary Work Out of A System (Work Done by System On The Surrounds) Is Defined AsDocument2 pagesThermodynamics: The Boundary Work Out of A System (Work Done by System On The Surrounds) Is Defined AsortizNo ratings yet
- Introduction To Aero Basic FormulationDocument3 pagesIntroduction To Aero Basic FormulationNihar SamalNo ratings yet
- gcl06Document26 pagesgcl06dhruvgangani9727No ratings yet
- Lec 12Document14 pagesLec 12Mohammad Yusril Iqbal HabibanaNo ratings yet
- Block Diagram and Transfer FunctionsDocument20 pagesBlock Diagram and Transfer FunctionsBatuhan Mutlugil 'Duman'No ratings yet
- Class #6: Structural Dynamics Single Degree of Freedom Systems Forced-Damped VibrationsDocument11 pagesClass #6: Structural Dynamics Single Degree of Freedom Systems Forced-Damped VibrationsTsiNat NathaNo ratings yet
- Aiits 2325 PT II Jeea Paper 1 SolDocument11 pagesAiits 2325 PT II Jeea Paper 1 SolRayNo ratings yet
- Calculation of Friction Losses, Power, Developed Head and Available Net Positive Suction Head of A Pump For A Non-Newtonian LiquidDocument5 pagesCalculation of Friction Losses, Power, Developed Head and Available Net Positive Suction Head of A Pump For A Non-Newtonian Liquidt_i_f_anoNo ratings yet
- Second Order TransientsDocument6 pagesSecond Order Transientsmusy1233No ratings yet
- Notes On Chebyshev Filters PDFDocument12 pagesNotes On Chebyshev Filters PDFArchit JainNo ratings yet
- Formula Sheet University PhysicsDocument3 pagesFormula Sheet University Physicsanon_616439356No ratings yet
- Ultrasound Lecture 1 Post - 2Document58 pagesUltrasound Lecture 1 Post - 2getachewNo ratings yet
- Bmt437-Time Response AnalysisDocument35 pagesBmt437-Time Response Analysisharshasri89No ratings yet
- Class Notes On KineticsDocument11 pagesClass Notes On KineticsjollyNo ratings yet
- Physics 11 Formula SheetDocument1 pagePhysics 11 Formula SheetJack Song S.YNo ratings yet
- Dynamics of Machinery: Turning Moment Diagrams - FlywheelsDocument50 pagesDynamics of Machinery: Turning Moment Diagrams - FlywheelsKoushik sai ThirupathiNo ratings yet
- Gate Aerospace Compressible FlowDocument11 pagesGate Aerospace Compressible Flowvenkatakrishnan srinivasanNo ratings yet
- HW 11 ADocument8 pagesHW 11 AVeiko CastañedaNo ratings yet
- Design of Analog FIltersDocument7 pagesDesign of Analog FIltersparshuram kumarNo ratings yet
- Section 1 Review of FundamentalsDocument23 pagesSection 1 Review of FundamentalsIvana Junia AleloNo ratings yet
- Chapter 7 System Compensation: (Linear Control System Design)Document35 pagesChapter 7 System Compensation: (Linear Control System Design)Khin AyeNo ratings yet
- SDOFDocument30 pagesSDOFb ramachandraNo ratings yet
- Chapter 2 Response To Harmonic Excitation: Introduces The Important Concept of ResonanceDocument100 pagesChapter 2 Response To Harmonic Excitation: Introduces The Important Concept of Resonanceasif aliNo ratings yet
- 2022 JEE Main 21 SolutionsDocument20 pages2022 JEE Main 21 SolutionsDheeraj ShrivastavaNo ratings yet
- Boyce/Diprima 10 Ed, CH 3.8: Forced VibrationsDocument29 pagesBoyce/Diprima 10 Ed, CH 3.8: Forced VibrationsphakphumNo ratings yet
- 05 More Than One VariableDocument95 pages05 More Than One VariableMUHAMMAD LUQMAN HAKIMI MOHD ZAMRINo ratings yet
- Free Vibration of Single Degree of Freedom (SDOF)Document107 pagesFree Vibration of Single Degree of Freedom (SDOF)Mahesh LohanoNo ratings yet
- Online Control Lecture #4Document33 pagesOnline Control Lecture #4Noor GamingNo ratings yet
- point point: mv mv mv mv E v is in the y-direction, we can get 其中 v 是沿 Y-方向的速度。由此得 mm mv Em v mm mDocument11 pagespoint point: mv mv mv mv E v is in the y-direction, we can get 其中 v 是沿 Y-方向的速度。由此得 mm mv Em v mm mMatheus PinheiroNo ratings yet
- Adv Control & Robotic Lec 4Document23 pagesAdv Control & Robotic Lec 4key3hseNo ratings yet
- Chapter 2 - RectifiersDocument59 pagesChapter 2 - RectifiersTàu NguyễnNo ratings yet
- WWW - Jeebooks.in: Simple Harmonic MotionDocument26 pagesWWW - Jeebooks.in: Simple Harmonic Motionyashjha0117No ratings yet
- EL2620 Nonlinear Control Today's GoalDocument9 pagesEL2620 Nonlinear Control Today's GoalAbdesselem BoulkrouneNo ratings yet
- c4 PplaceDocument8 pagesc4 Pplacekenji91No ratings yet
- TKPS - Discrete-Time Filter DesignDocument29 pagesTKPS - Discrete-Time Filter DesignSudirman MaliangNo ratings yet
- Midterm Review PDFDocument16 pagesMidterm Review PDFMt RushNo ratings yet
- Numerical Modeling: Tube-Wave Reflections in Cased BoreholeDocument24 pagesNumerical Modeling: Tube-Wave Reflections in Cased BoreholeKhairulShafiqNo ratings yet
- 27.3.8 - Forced VibrationsDocument32 pages27.3.8 - Forced VibrationskumiristineNo ratings yet
- Lecture 4Document16 pagesLecture 4Fong Wei JunNo ratings yet
- ELL 100 Introduction To Electrical Engineering: L 12: T R S - O C (F R)Document45 pagesELL 100 Introduction To Electrical Engineering: L 12: T R S - O C (F R)conference RequirementsNo ratings yet
- StabilityDocument6 pagesStabilitysekinNo ratings yet
- Chapter 2 CLC 2021Document28 pagesChapter 2 CLC 2021Nguyễn Thị LýNo ratings yet
- Lecture No. 3 2022 23Document11 pagesLecture No. 3 2022 23Sean Ben KadusaleNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Lecture 10 SD Single Degree of Freedom System Impulsive LoadingDocument13 pagesLecture 10 SD Single Degree of Freedom System Impulsive LoadingSarose PrajapatiNo ratings yet
- Lecture 9 SD Single Degree of Freedom System Periodic LoadingDocument22 pagesLecture 9 SD Single Degree of Freedom System Periodic LoadingSarose PrajapatiNo ratings yet
- Structural Dynamics: M.E. in Earthquake EngineeringDocument32 pagesStructural Dynamics: M.E. in Earthquake EngineeringSarose PrajapatiNo ratings yet
- Lecture 7 SD Single Degree of Freedom (SDOF) System (6) Harmonic LoadingDocument38 pagesLecture 7 SD Single Degree of Freedom (SDOF) System (6) Harmonic LoadingSarose PrajapatiNo ratings yet
- Lecture 8 SD Single Degree of Freedom System Periodic LoadingDocument37 pagesLecture 8 SD Single Degree of Freedom System Periodic LoadingSarose PrajapatiNo ratings yet
- Lecture 2 SD Single Degree of Freedom (SDOF) SystemDocument27 pagesLecture 2 SD Single Degree of Freedom (SDOF) SystemSarose Prajapati100% (1)
- Structural Analysis Volume 2 S Bhavikatti PDF: Download PDF Files - 2018 Extended Database Cluster 2Document5 pagesStructural Analysis Volume 2 S Bhavikatti PDF: Download PDF Files - 2018 Extended Database Cluster 2Sarose PrajapatiNo ratings yet
- Using MLAG in Dell Networks v1.3Document33 pagesUsing MLAG in Dell Networks v1.3Damian CostantinoNo ratings yet
- The Economic Consequences of Accounting Fraud in Product MarketsDocument37 pagesThe Economic Consequences of Accounting Fraud in Product MarketsJeiny ZambranoNo ratings yet
- Is 3786 1983 PDFDocument33 pagesIs 3786 1983 PDFsinegapriya100% (1)
- Business Environment ProjectDocument19 pagesBusiness Environment Projectaditi100% (1)
- Pub - Green Advertising and Green Public Relations As Integration PropagandaDocument16 pagesPub - Green Advertising and Green Public Relations As Integration PropagandagbthomasonNo ratings yet
- Elctrical Machine 1 Final ExamDocument4 pagesElctrical Machine 1 Final ExamAbdullahi Mohamed IsakNo ratings yet
- Kubernetes Deploy Mysql Spring Rest Api React Native App InstructionsDocument7 pagesKubernetes Deploy Mysql Spring Rest Api React Native App InstructionsJean Claude OnanaNo ratings yet
- Radio Link FailureDocument19 pagesRadio Link FailureDeepanshu SharmaNo ratings yet
- Materials Handling: in ConstructionDocument41 pagesMaterials Handling: in ConstructionSatya NaiduNo ratings yet
- Fireworks Projectile Explodes High and AwayDocument3 pagesFireworks Projectile Explodes High and AwayRocel Marie SullestaNo ratings yet
- Business Studies Project Class XIIDocument13 pagesBusiness Studies Project Class XIIKanishk Mehrotra67% (15)
- Project Based Learning And: Authentic AssessmentDocument52 pagesProject Based Learning And: Authentic Assessmentnancie8No ratings yet
- OlatheNorth DaMo Aff 01 - Washburn Rural Round 2Document25 pagesOlatheNorth DaMo Aff 01 - Washburn Rural Round 2EmronNo ratings yet
- Iteco-010901-B (0.6 - 1KV TFR-CV Spec)Document9 pagesIteco-010901-B (0.6 - 1KV TFR-CV Spec)Kyaw ThihaNo ratings yet
- Oworin Meji Falokun Fatumbi Awo Ifa World PerspectiveDocument13 pagesOworin Meji Falokun Fatumbi Awo Ifa World PerspectiveLevy Braunstein100% (1)
- Lección 7 - Who - Why-Because (WH Questions)Document3 pagesLección 7 - Who - Why-Because (WH Questions)V QuintNo ratings yet
- A Detailed Study On Loss Processes in Solar CellsDocument11 pagesA Detailed Study On Loss Processes in Solar CellsFernando DiasNo ratings yet
- Tabel 1. Range Nilai Log SP, Resistivity Dan Gamma Ray No - Litologi Range Nilai Range Nilai Log Range Nilai LogDocument1 pageTabel 1. Range Nilai Log SP, Resistivity Dan Gamma Ray No - Litologi Range Nilai Range Nilai Log Range Nilai Logdody24No ratings yet
- WB4 Short Form - Dual Branding - 10-24-19Document2 pagesWB4 Short Form - Dual Branding - 10-24-19joseNo ratings yet
- Market Visit ReportDocument10 pagesMarket Visit Reportokwadha simionNo ratings yet
- Computer POST and Beep CodesDocument8 pagesComputer POST and Beep CodesJDNo ratings yet
- Important Safeguards. Instrucciones Importantes de SeguridadDocument2 pagesImportant Safeguards. Instrucciones Importantes de SeguridadLUISA MALDONADO ROANo ratings yet
- BSBTWK502 Project PortfolioDocument11 pagesBSBTWK502 Project Portfoliobarun ghimireNo ratings yet
- Mechanical Environmental Studies EST 22447 Unit Test 1Document12 pagesMechanical Environmental Studies EST 22447 Unit Test 1Arvind YadavNo ratings yet
- Dissertation Auf DeutschDocument8 pagesDissertation Auf DeutschWriteMyPaperForMeSpringfield100% (1)
- Question Bank - EEE - 2021 SchemeDocument3 pagesQuestion Bank - EEE - 2021 SchemeAnusha ReddyNo ratings yet
- DIP Lab: Introduction To MATLAB: GoalDocument7 pagesDIP Lab: Introduction To MATLAB: GoalMohamed El-Mutasim El-FeelNo ratings yet
- Chassis EUROCASE ML-5410 Middle Tower Full ATX Mainboard Supported, 7 Slots, PSU InsDocument5 pagesChassis EUROCASE ML-5410 Middle Tower Full ATX Mainboard Supported, 7 Slots, PSU InsGuran MaricioNo ratings yet