Download as pdf or txt
You might also like
- 8l90e_download_with_linksDocument140 pages8l90e_download_with_linksCarlos Garcia GodoyNo ratings yet
- Details On Our Getrag - Magna 7DCL750 DCT Trans, and A Request For Repair Manual - MBWorld - Org ForumsDocument1 pageDetails On Our Getrag - Magna 7DCL750 DCT Trans, and A Request For Repair Manual - MBWorld - Org ForumsFabrizioNo ratings yet
- A5S390RDocument4 pagesA5S390Rdobrescuionut1981No ratings yet
- Earlham Park: Edith Cavell Building University VillageDocument1 pageEarlham Park: Edith Cavell Building University VillageGiang BuiNo ratings yet
- AodeDocument6 pagesAodewalasNo ratings yet
- GR00005100 23a PDFDocument152 pagesGR00005100 23a PDFNicu PascalutaNo ratings yet
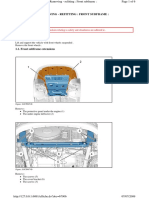
- C4GP Remove and Refit Front Sub FrameDocument6 pagesC4GP Remove and Refit Front Sub FrameisidroNo ratings yet
- CP5013 0 1 PDFDocument8 pagesCP5013 0 1 PDFMauricio Guerrero100% (3)
- 6 HP 19Document4 pages6 HP 19JhonsonNo ratings yet
- Fjernstart Fyr VolvoDocument22 pagesFjernstart Fyr VolvoTonny PedersenNo ratings yet
- 6f5055 PDFDocument4 pages6f5055 PDFCambio Automático do BrasilNo ratings yet
- 4l60e 4l70eDocument2 pages4l60e 4l70eTransmisiones GueroNo ratings yet
- BS 8110Document9 pagesBS 8110Priyadarshini Sahoo100% (1)
- Rotating ImbalanceDocument3 pagesRotating ImbalanceGem CarpioNo ratings yet
- 62 TeDocument171 pages62 TeUlloaEliasNo ratings yet
- 6T40 Gen III - Start StopDocument3 pages6T40 Gen III - Start Stopchoco84No ratings yet
- 4 L 60 EgroundDocument2 pages4 L 60 EgroundDavid RosadoNo ratings yet
- Four Wheel Drive (4WD) Controls - TaggedDocument40 pagesFour Wheel Drive (4WD) Controls - TaggedNatty NuggetNo ratings yet
- C4 General DataDocument1 pageC4 General DataGypsyRNo ratings yet
- 4L40E (A4S 200R) BMW 98 On. 5L40E (A5S 360R) BMW 98 On & Cadillac 03 OnDocument9 pages4L40E (A4S 200R) BMW 98 On. 5L40E (A5S 360R) BMW 98 On & Cadillac 03 Onmanfred16No ratings yet
- Transtar Valve Body Manual2 PDFDocument108 pagesTranstar Valve Body Manual2 PDFMarcos Montes100% (1)
- GradeabilityDocument2 pagesGradeabilityArun KattuparambilNo ratings yet
- Transmission Removal and Installation at PDFDocument4 pagesTransmission Removal and Installation at PDFOskars ŠtālsNo ratings yet
- Semi Automatic Transmission ReportDocument52 pagesSemi Automatic Transmission ReportPranav EkhandeNo ratings yet
- CVT C Transmission TransaxleDocument240 pagesCVT C Transmission TransaxleFX WamalaNo ratings yet
- 55-1 Hood PDFDocument11 pages55-1 Hood PDFmefisto06cNo ratings yet
- Application: 1990 Ford Bronco 1990 Ford BroncoDocument43 pagesApplication: 1990 Ford Bronco 1990 Ford BroncoWin CardonaNo ratings yet
- Dodge JourneyDocument387 pagesDodge Journeycesar alejandro scavoNo ratings yet
- RXV2065 HTR6295Document163 pagesRXV2065 HTR6295Milan JovićNo ratings yet
- 01J Clutch Clearances: Technical Information BulletinDocument1 page01J Clutch Clearances: Technical Information Bulletinfadrique54No ratings yet
- DCT-Dual Clutch TransmissionDocument16 pagesDCT-Dual Clutch TransmissionVinod Kumar100% (3)
- DSG7 DQ200 CalibrationDocument8 pagesDSG7 DQ200 CalibrationMladen ElezNo ratings yet
- Genesis 3.8L Section 2Document75 pagesGenesis 3.8L Section 2Nacho MowjiNo ratings yet
- Reverse EngineeringDocument24 pagesReverse EngineeringAl Mutiry MuardNo ratings yet
- Continuously Variable TransmissionDocument33 pagesContinuously Variable Transmissionsk9145100% (1)
- AL4 Pressure Regulation FaultDocument3 pagesAL4 Pressure Regulation Faultsirajmy100% (1)
- Unit - 1: Automotive FundamentalsDocument26 pagesUnit - 1: Automotive FundamentalsvedhhNo ratings yet
- 345S Operators Manual: 511bailey Ave PO Box 324 New Hampton, IA 50659 Fax: 1-641-394-6224Document9 pages345S Operators Manual: 511bailey Ave PO Box 324 New Hampton, IA 50659 Fax: 1-641-394-6224valangelofNo ratings yet
- Rondo 2.7L 2007 Service ManualDocument2,489 pagesRondo 2.7L 2007 Service ManualĐạt ThànhNo ratings yet
- HOERBIGER DCT-Type SynchronizerDocument4 pagesHOERBIGER DCT-Type SynchronizermaheshmbelgaviNo ratings yet
- Transmission Report: Money in The Bank - The GM/Ford Joint VentureDocument8 pagesTransmission Report: Money in The Bank - The GM/Ford Joint VentureAnonymous TMFgAgR09tNo ratings yet
- The Refrigerant R1234yf in Air ConditionDocument11 pagesThe Refrigerant R1234yf in Air ConditionAby Torres HernándezNo ratings yet
- 4L60E Lasy Solenoid CommandDocument2 pages4L60E Lasy Solenoid CommandRobert MoreauNo ratings yet
- Service Data - TOYOTA A650E AUTOMATIC TRANS.Document5 pagesService Data - TOYOTA A650E AUTOMATIC TRANS.John BacsikNo ratings yet
- Advanced Manual-Transmission Diagnostics: Up To StandardsDocument0 pagesAdvanced Manual-Transmission Diagnostics: Up To StandardsLuisYFer1No ratings yet
- Antique Automatic Transmission PartsDocument16 pagesAntique Automatic Transmission PartsMiroslav GojicNo ratings yet
- Evaluation of Mechanical and Tribological Behavior of Al-4 % Cu-X% SiC Composites Prepared Through Powder Metallurgy TechniqueDocument11 pagesEvaluation of Mechanical and Tribological Behavior of Al-4 % Cu-X% SiC Composites Prepared Through Powder Metallurgy TechniqueAruno AnbuNo ratings yet
- 00 01 PDFDocument2 pages00 01 PDFКонстантин МалетинNo ratings yet
- 55 50SNDocument1 page55 50SNPedroMecanicoNo ratings yet
- Mechatronik SealDocument3 pagesMechatronik SealMihai Serban OlariuNo ratings yet
- Automation of VW Transmission 02k-DNZ: Internal TraineeshipDocument48 pagesAutomation of VW Transmission 02k-DNZ: Internal TraineeshipMarcos MontesNo ratings yet
- Atb 003Document2 pagesAtb 003Tejon Aguilar100% (1)
- Automatic GearboxDocument38 pagesAutomatic GearboxCristian IfrimNo ratings yet
- Automatic Transmission 42REDocument121 pagesAutomatic Transmission 42REmtaylor030% (7)
- TH400 Dissassembly TechnicalDocument29 pagesTH400 Dissassembly TechnicalmateoNo ratings yet
- P 0741Document3 pagesP 0741Bang Joen SE100% (1)
- Celestron c10 N Users Manual 393252Document71 pagesCelestron c10 N Users Manual 393252TestNo ratings yet
- HW6 15oct18 SolnDocument6 pagesHW6 15oct18 SolnMuhammad UsmanNo ratings yet
- Phys 203 Princeton University Fall 2006 Final Exam: K R K VDocument5 pagesPhys 203 Princeton University Fall 2006 Final Exam: K R K Vmichael pasquiNo ratings yet
- Two Dof State Space RevDDocument15 pagesTwo Dof State Space RevDDeosharan RoyNo ratings yet
- Final ExamDocument9 pagesFinal ExamRobertNo ratings yet
- Little Baguio Building Rules and Regulations DraftDocument7 pagesLittle Baguio Building Rules and Regulations DraftJun Dela CruzNo ratings yet
- CM YSM Air Handling Unit Catalogue Part4Document1 pageCM YSM Air Handling Unit Catalogue Part4JosephRusselVizmanosNo ratings yet
- Marine and ShipyardDocument80 pagesMarine and Shipyardahlan zulfakhriNo ratings yet
- Annotated BibliographyDocument15 pagesAnnotated Bibliographyapi-190312542No ratings yet
- Best Practice & Research Clinical RheumatologyDocument15 pagesBest Practice & Research Clinical RheumatologyTatiana GonzalezNo ratings yet
- Probability and Measurement UncertaintyDocument99 pagesProbability and Measurement UncertaintypticicaaaNo ratings yet
- TIS REV5 BRAINFARMA Brasile 1-055-12-12-22-1Document14 pagesTIS REV5 BRAINFARMA Brasile 1-055-12-12-22-1AndreaNo ratings yet
- Mchdl-01-2024-025-Lubes (Be Aerospace)Document1 pageMchdl-01-2024-025-Lubes (Be Aerospace)Eddard StarkNo ratings yet
- Airport 170923125652Document46 pagesAirport 170923125652Raj GuptaNo ratings yet
- Deep Learning: Huawei AI Academy Training MaterialsDocument47 pagesDeep Learning: Huawei AI Academy Training Materialsfadhil muhammad hanafiNo ratings yet
- Fire Pump Field Acceptance TestDocument23 pagesFire Pump Field Acceptance Testwalitedison100% (1)
- Nuclear Power Gcse CourseworkDocument8 pagesNuclear Power Gcse Courseworkbcqneexy100% (2)
- Japan - Architecture, Constructions, Ambiances (Christian Schittich) (Z-Library)Document178 pagesJapan - Architecture, Constructions, Ambiances (Christian Schittich) (Z-Library)余鎮麟No ratings yet
- Improve Your Skills For IELTS - Reading Low pp14-22Document9 pagesImprove Your Skills For IELTS - Reading Low pp14-22Suna KimNo ratings yet
- 7 Principles of An EagleDocument2 pages7 Principles of An EagleDhruti BotadraNo ratings yet
- Assessment and Transportation Risk-1Document7 pagesAssessment and Transportation Risk-1TanzeemNo ratings yet
- Fabric Test Report: Gohar TextileDocument4 pagesFabric Test Report: Gohar TextileAmir sindhuu Moon sindhuNo ratings yet
- Margo Lanagan - Sea Hearts (Extract)Document7 pagesMargo Lanagan - Sea Hearts (Extract)Allen & UnwinNo ratings yet
- Advances in Textile Waste Water TreatmentDocument17 pagesAdvances in Textile Waste Water TreatmentYamitakaiNo ratings yet
- 8816 User Manual Iss6 5Document40 pages8816 User Manual Iss6 5Richard Ritchie MettensNo ratings yet
- FF1. Unit 2, ToysDocument37 pagesFF1. Unit 2, ToysBội LaiNo ratings yet
- KRTB LFLP71.32Document31 pagesKRTB LFLP71.32Ranadheer BNo ratings yet
- Schrack Accessories Industrial Power Relay RT: General Purpose RelaysDocument6 pagesSchrack Accessories Industrial Power Relay RT: General Purpose RelaysUlfran MedinaNo ratings yet
- D4 InfanciaDocument3 pagesD4 InfanciaPedroPocasNo ratings yet
- Development of A Topical Gel Containing A Dipeptidyl Peptidase-4 Inhibitor For Wound Healing ApplicationsDocument15 pagesDevelopment of A Topical Gel Containing A Dipeptidyl Peptidase-4 Inhibitor For Wound Healing ApplicationsGlobal Research and Development ServicesNo ratings yet
- Invitation To Practice YogaDocument110 pagesInvitation To Practice Yogapassion26No ratings yet
- FF-1600-EX & FF3200 Proportioning UnitDocument36 pagesFF-1600-EX & FF3200 Proportioning Unitmuhammad indra fauzi marhadinataNo ratings yet
- Building Your Emotional Grid For The Law of AttractionDocument28 pagesBuilding Your Emotional Grid For The Law of AttractionMeraki Mary100% (2)
- CLS Aipmt-19-20 XIII Che Study-Package-3 Level-1 Chapter-15 PDFDocument40 pagesCLS Aipmt-19-20 XIII Che Study-Package-3 Level-1 Chapter-15 PDFThavasimariselvam N100% (1)