Download as pdf or txt
You might also like
- Transactional-Analysis-Case PresentationDocument23 pagesTransactional-Analysis-Case PresentationKrizzia Louise B. Cabrera100% (1)
- ALS-R User's Manual: Amplified Spontaneous Emission Light SourceDocument16 pagesALS-R User's Manual: Amplified Spontaneous Emission Light SourceAnonymous 60esBJZIjNo ratings yet
- Improved Deep Fuzzy Clustering For Accurate and Interpretable ClassifiersDocument7 pagesImproved Deep Fuzzy Clustering For Accurate and Interpretable ClassifiersChinnu S SathishNo ratings yet
- Better Mixing Via Deep RepresentationsDocument9 pagesBetter Mixing Via Deep RepresentationsMohmad AzharNo ratings yet
- Vincent 10 ADocument38 pagesVincent 10 AyyscribdNo ratings yet
- Destin: A Scalable Deep Learning Architecture With Application To High-Dimensional Robust Pattern RecognitionDocument5 pagesDestin: A Scalable Deep Learning Architecture With Application To High-Dimensional Robust Pattern RecognitionRobert CoopNo ratings yet
- On The Performance of GoogLeNet and AlexNet Applied To Sketches - Highlighted PaperDocument5 pagesOn The Performance of GoogLeNet and AlexNet Applied To Sketches - Highlighted PaperShubham ChaudharyNo ratings yet
- Deep LearnongDocument14 pagesDeep LearnongJuniper2015No ratings yet
- Deep Learning For Wind Speed Forecasting in Northeastern Region of BrazilDocument6 pagesDeep Learning For Wind Speed Forecasting in Northeastern Region of BrazilkikizouzouNo ratings yet
- Conv Neural NetsDocument11 pagesConv Neural NetsArannya MonzurNo ratings yet
- A Review On Basic Deep LearningDocument9 pagesA Review On Basic Deep Learningyanbiao liNo ratings yet
- CNN Eem305Document7 pagesCNN Eem305api-330059482100% (1)
- A Novel Generative Encoding For ExploitiDocument8 pagesA Novel Generative Encoding For ExploitiasdfNo ratings yet
- Learning Multiple Layers of Representation: Geoffrey E. HintonDocument7 pagesLearning Multiple Layers of Representation: Geoffrey E. HintonVănAnhNo ratings yet
- One-Shot Learning With Memory-Augmented Neural NetworksDocument13 pagesOne-Shot Learning With Memory-Augmented Neural Networksa4104165No ratings yet
- Lee 19 DDocument10 pagesLee 19 DyogaNo ratings yet
- #Loyola, Pedergnana & Garcia - Smart Sampling and Incremental Function Learning For Very Large High Dimensional DataDocument13 pages#Loyola, Pedergnana & Garcia - Smart Sampling and Incremental Function Learning For Very Large High Dimensional DataluizotaviocfgNo ratings yet
- Proposal Example3Document2 pagesProposal Example3jhvsczcNo ratings yet
- Hafemann Ijcnn 2015Document7 pagesHafemann Ijcnn 2015Betül KaraNo ratings yet
- 1 s2.0 S2666827022001049 MainDocument8 pages1 s2.0 S2666827022001049 MainivanNo ratings yet
- Modeling Systems With Machine Learning Based Differential EquationsDocument12 pagesModeling Systems With Machine Learning Based Differential EquationsjaisnsceNo ratings yet
- YOLO V3 ML ProjectDocument15 pagesYOLO V3 ML ProjectAnnie ShuklaNo ratings yet
- Bench MarkingDocument12 pagesBench Markingamgad monirNo ratings yet
- Deep Learning ReviewDocument9 pagesDeep Learning ReviewMatteo JanssenNo ratings yet
- Brain-Inspired Replay For Continual Learning With Artificial Neural NetworksDocument14 pagesBrain-Inspired Replay For Continual Learning With Artificial Neural NetworksksandeshkNo ratings yet
- Solve Complex Problems Using Artificial Neural Network Learned by PSODocument7 pagesSolve Complex Problems Using Artificial Neural Network Learned by PSOjaaNo ratings yet
- Siamese Neural Networks For One-Shot Image RecognitionDocument8 pagesSiamese Neural Networks For One-Shot Image Recognitionabyasingh04No ratings yet
- Accelerated Bayesian Optimization For Deep LearningDocument13 pagesAccelerated Bayesian Optimization For Deep LearningCS & ITNo ratings yet
- Gradient Boosting Machines, A Tutorial: NeuroroboticsDocument21 pagesGradient Boosting Machines, A Tutorial: NeuroroboticsAbhishek KumarNo ratings yet
- 105 Machine Learning PaperDocument6 pages105 Machine Learning PaperAabda AhmedNo ratings yet
- Visualization TechreportDocument14 pagesVisualization TechreportMateusz ŁugowskiNo ratings yet
- Le y Yang - Tiny ImageNet Visual Recognition ChallengeDocument6 pagesLe y Yang - Tiny ImageNet Visual Recognition Challengemusicalización pacíficoNo ratings yet
- Human Activity Recognition: Ms. Shikha, Rohan Kumar, Shivam Aggarwal, Shrey JainDocument3 pagesHuman Activity Recognition: Ms. Shikha, Rohan Kumar, Shivam Aggarwal, Shrey Jainpalpendiculal00No ratings yet
- Recent Advances in AutoencodersDocument25 pagesRecent Advances in AutoencodersNikita ZavonskiyNo ratings yet
- New Bridges Between Deep Learning and Partial Differential EquationsDocument5 pagesNew Bridges Between Deep Learning and Partial Differential EquationsAman JalanNo ratings yet
- Over-Sampling Algorithm For Imbalanced Data Classification: XU Xiaolong, Chen Wen, and SUN YanfeiDocument10 pagesOver-Sampling Algorithm For Imbalanced Data Classification: XU Xiaolong, Chen Wen, and SUN YanfeivikasbhowateNo ratings yet
- Szegedy 2014 Intriguing Properties of Neural Networks PDFDocument10 pagesSzegedy 2014 Intriguing Properties of Neural Networks PDFroblee1No ratings yet
- 2015 Lecun DeeplearnDocument10 pages2015 Lecun Deeplearncs888dnNo ratings yet
- Room Classification Using Machine LearningDocument16 pagesRoom Classification Using Machine LearningVARSHANo ratings yet
- Ai Ga1Document7 pagesAi Ga1Darshnik DeepNo ratings yet
- Neural Network As Universal ApproximatesDocument5 pagesNeural Network As Universal ApproximatesGujuluva KarthikNo ratings yet
- Impact of Image Resizing On Deep Learning Detectors For Training Time and Model PerformanceDocument8 pagesImpact of Image Resizing On Deep Learning Detectors For Training Time and Model Performancebryansantoso8585No ratings yet
- Self-Critical Sequence Training For Image CaptioningDocument17 pagesSelf-Critical Sequence Training For Image CaptioningvukpetarNo ratings yet
- Neural SymbolicDocument22 pagesNeural Symbolicraky25No ratings yet
- EmpiricalDocument8 pagesEmpiricalIsura NirmalNo ratings yet
- Are All Layers Created Equal?: Chiyuan Zhang Samy Bengio Yoram Singer May 28, 2019Document18 pagesAre All Layers Created Equal?: Chiyuan Zhang Samy Bengio Yoram Singer May 28, 2019Brofessor Paul NguyenNo ratings yet
- Lecun 2015Document10 pagesLecun 2015spanishbear75No ratings yet
- Nature14539 PDFDocument9 pagesNature14539 PDFOnyong GalarionNo ratings yet
- Brain Tumor SegmentationDocument5 pagesBrain Tumor SegmentationlijaNo ratings yet
- Yoshua Bengio, Nicolas Boulanger-Lewandowski and Razvan PascanuDocument5 pagesYoshua Bengio, Nicolas Boulanger-Lewandowski and Razvan PascanuHồ Văn ChươngNo ratings yet
- 2015 LecunDocument10 pages2015 LecunArshad MohammedNo ratings yet
- Why Does Unsupervised Pre-Training Help Deep Learning?Document36 pagesWhy Does Unsupervised Pre-Training Help Deep Learning?AndersonCarlosNo ratings yet
- Image Classification Using Small Convolutional Neural NetworkDocument5 pagesImage Classification Using Small Convolutional Neural NetworkKompruch BenjaputharakNo ratings yet
- Natural Images: Coding Efficiency 19Document9 pagesNatural Images: Coding Efficiency 19Yanquiel Mansfarroll GonzalezNo ratings yet
- Measuring in Variances Deep NetworksDocument9 pagesMeasuring in Variances Deep NetworksIvana MilašNo ratings yet
- 1 s2.0 S0031320317304120 MainDocument24 pages1 s2.0 S0031320317304120 MainajgallegoNo ratings yet
- Learning Multiple Visual Domains With Residual AdaptersDocument11 pagesLearning Multiple Visual Domains With Residual AdaptersYe DuNo ratings yet
- PIIS0896627320304682Document14 pagesPIIS0896627320304682khan rqaib mahmudNo ratings yet
- Research Paper-2Document5 pagesResearch Paper-2Jasmine AwatramaniNo ratings yet
- Enhancing Deep Learning Performance Using Displaced Rectifier Linear UnitFrom EverandEnhancing Deep Learning Performance Using Displaced Rectifier Linear UnitNo ratings yet
- Deep Learning with Python: A Comprehensive Guide to Deep Learning with PythonFrom EverandDeep Learning with Python: A Comprehensive Guide to Deep Learning with PythonNo ratings yet
- Self-Normalizing Neural Networks PDFDocument102 pagesSelf-Normalizing Neural Networks PDFyuyiipNo ratings yet
- Fixup Initialization PDFDocument16 pagesFixup Initialization PDFyuyiipNo ratings yet
- 1.1 Basics of The Fluid-Structure Interaction Problem in Deep VeinDocument14 pages1.1 Basics of The Fluid-Structure Interaction Problem in Deep VeinyuyiipNo ratings yet
- Flow Through A Tube Simulation: Burak Yavuz 702181004 Special Topics in Computational Science and EngineeringDocument11 pagesFlow Through A Tube Simulation: Burak Yavuz 702181004 Special Topics in Computational Science and EngineeringyuyiipNo ratings yet
- Nptel DividedDocument47 pagesNptel DividedyuyiipNo ratings yet
- Lecture4 PDFDocument108 pagesLecture4 PDFyuyiipNo ratings yet
- Counting PDFDocument4 pagesCounting PDFyuyiipNo ratings yet
- Newton Divided DifferenceDocument25 pagesNewton Divided DifferenceyuyiipNo ratings yet
- GoldghDocument1 pageGoldghyuyiipNo ratings yet
- 492 Study Report: Engin Deniz Alpman June 2, 2017Document29 pages492 Study Report: Engin Deniz Alpman June 2, 2017yuyiipNo ratings yet
- S1 Results 1Document52 pagesS1 Results 1yuyiipNo ratings yet
- Stacks Queues ListsDocument6 pagesStacks Queues ListsyuyiipNo ratings yet
- Propulsim PosterDocument1 pagePropulsim PosteryuyiipNo ratings yet
- Derivation of The Boltzmann DistributionDocument6 pagesDerivation of The Boltzmann DistributionyuyiipNo ratings yet
- Guidelines For ReportDocument8 pagesGuidelines For ReportYash SinghNo ratings yet
- Prof. Alberto Berizzi: Dipartimento Di Energia Ph. 02 2399 3728 Email: Alberto - Berizzi@polimi - ItDocument32 pagesProf. Alberto Berizzi: Dipartimento Di Energia Ph. 02 2399 3728 Email: Alberto - Berizzi@polimi - ItMohammed OsmanNo ratings yet
- Temas de Ensayo de MacroeconomíaDocument6 pagesTemas de Ensayo de Macroeconomíag69zer9d100% (1)
- Group 2 - Tinder's AlgorithmDocument3 pagesGroup 2 - Tinder's AlgorithmKarinNo ratings yet
- SuperstitionsDocument5 pagesSuperstitionssina badz100% (1)
- Iso 13849-1-2023Document164 pagesIso 13849-1-2023gokhanekinci92No ratings yet
- The Discovery of America An Out-Growth of The Conquest of The Moors by The Spaniards (1883)Document32 pagesThe Discovery of America An Out-Growth of The Conquest of The Moors by The Spaniards (1883)Tram Dickerson El100% (5)
- Guide To Iso 9001 2015 PDFDocument15 pagesGuide To Iso 9001 2015 PDFahmed nawaz100% (2)
- Flotation Process of GoldDocument5 pagesFlotation Process of GoldMickShazanNo ratings yet
- Microeconomics Question Set 4 (20231107) AnswerkeyDocument9 pagesMicroeconomics Question Set 4 (20231107) AnswerkeyMegumi TsuchiyaNo ratings yet
- Normalisation in MS AccessDocument11 pagesNormalisation in MS AccessFrances VorsterNo ratings yet
- KL202232 PSRPT 2022-05-18 18.01.51Document19 pagesKL202232 PSRPT 2022-05-18 18.01.51Thuy AnhNo ratings yet
- KSA Requirements For FOA CFOT CertificationDocument4 pagesKSA Requirements For FOA CFOT Certificationmohamed ghazyNo ratings yet
- Jurnal Dinamika Ekonomi Pembangunan (JDEP) : Sektor Pariwisata Indonesia Di Tengah Pandemi Covid 19Document7 pagesJurnal Dinamika Ekonomi Pembangunan (JDEP) : Sektor Pariwisata Indonesia Di Tengah Pandemi Covid 19Nanda SyafiraNo ratings yet
- Advt. 4 Year 2022 - WebsiteDocument6 pagesAdvt. 4 Year 2022 - WebsiteprakashNo ratings yet
- Combustion in Swirling Flow - A ReviewDocument59 pagesCombustion in Swirling Flow - A ReviewTimothy Edward Dawson100% (1)
- ICDBME2022 - Book of AbstractsDocument341 pagesICDBME2022 - Book of AbstractsAlev TaskınNo ratings yet
- As 1330-2004 Metallic Materials - Drop Weight Tear Test For Ferritic SteelsDocument7 pagesAs 1330-2004 Metallic Materials - Drop Weight Tear Test For Ferritic SteelsSAI Global - APACNo ratings yet
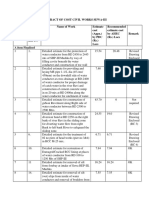
- Abstract of Cost Civil Works SewaDocument3 pagesAbstract of Cost Civil Works SewaPrabhat MicNo ratings yet
- 2 HIE ENG HardwareDocument21 pages2 HIE ENG HardwareWalter Lazo100% (1)
- Cyrillan Project Final ReportDocument28 pagesCyrillan Project Final ReportDat Nguyen ThanhNo ratings yet
- Camlin Research MrthodologyDocument17 pagesCamlin Research MrthodologyArnav DuttaNo ratings yet
- Joann Phonemic Awareness Phonics FluencyDocument82 pagesJoann Phonemic Awareness Phonics FluencyEvelinaNo ratings yet
- ZazaDesign & Construction Suarez PresentationDocument48 pagesZazaDesign & Construction Suarez PresentationNayar GutierrezNo ratings yet
- Plegadora WC67YDocument5 pagesPlegadora WC67YJhonny AlvarezNo ratings yet
- Lessons 1 17: MODULO 2 - 2008-9 Meaning and Discourse in EnglishDocument35 pagesLessons 1 17: MODULO 2 - 2008-9 Meaning and Discourse in EnglishLogi CheminotNo ratings yet
- Presentation FixDocument3 pagesPresentation FixDanny Fajar SetiawanNo ratings yet
- VDB3722MA Driver With Microstep Série NovaDocument16 pagesVDB3722MA Driver With Microstep Série NovaJefferson Alcantara GomesNo ratings yet