
Minor Project
Minor Project
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
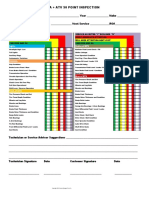
- 50 Point ATV Inspection FormDocument1 page50 Point ATV Inspection FormJuan Forte100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- VW 4 Cylinder Diesel Engine 1.9L Engine Workshop ManualDocument278 pagesVW 4 Cylinder Diesel Engine 1.9L Engine Workshop ManualCar TrendNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 04 - E90 PowertrainDocument18 pages04 - E90 Powertrainjapspeed80% (5)
- Deutz Engine Model Serial NumberDocument28 pagesDeutz Engine Model Serial NumberanggieNo ratings yet
- Recent Gas Metal Arc Welding (GMAW) Process Developments - The Implications Related To International Fabrication StandardsDocument13 pagesRecent Gas Metal Arc Welding (GMAW) Process Developments - The Implications Related To International Fabrication StandardsShashank AnandNo ratings yet
- BAJA SAEINDIA 2020 - CAE Award Poster FormatDocument1 pageBAJA SAEINDIA 2020 - CAE Award Poster FormatShashank AnandNo ratings yet
- Minor Project: Submitted By:-Anurag Aggarwal Sahil Sharma Amrit Singh Vivek PrasadDocument15 pagesMinor Project: Submitted By:-Anurag Aggarwal Sahil Sharma Amrit Singh Vivek PrasadShashank AnandNo ratings yet
- Turbulent Boundary Layer Theory and Its Application ' To Blade Profile Design "Document71 pagesTurbulent Boundary Layer Theory and Its Application ' To Blade Profile Design "Shashank AnandNo ratings yet
- Golf 4 - OsiguračiDocument7 pagesGolf 4 - OsiguračiСтеван КовачNo ratings yet
- Checklist C150F CC-LHN (Rev. Abr.2021)Document2 pagesChecklist C150F CC-LHN (Rev. Abr.2021)Sebastian Emilio Alvarado Zambrano100% (1)
- 06b - Prop ControlDocument1 page06b - Prop Controljbert55No ratings yet
- Soilmec SR-125 HIT Hydraulic Rotary Rig (April 2016)Document12 pagesSoilmec SR-125 HIT Hydraulic Rotary Rig (April 2016)sandycastleNo ratings yet
- 47.mewp Check List Unisco (F) - 47Document1 page47.mewp Check List Unisco (F) - 47ibrahimNo ratings yet
- Radio Renault Megane II (Bm01 - , Cm01 - ) 1.4 16v (Bm0b, Cm0b) 1992252 B-PartsDocument1 pageRadio Renault Megane II (Bm01 - , Cm01 - ) 1.4 16v (Bm0b, Cm0b) 1992252 B-Partspoba05No ratings yet
- How To Change Front Suspension Strut On Citroen Xsara Coupe n0 Replacement GuideDocument25 pagesHow To Change Front Suspension Strut On Citroen Xsara Coupe n0 Replacement Guidematej89No ratings yet
- BMW E87 Vehicle Chassis Suspension and Dynamic Driving Systems PDFDocument40 pagesBMW E87 Vehicle Chassis Suspension and Dynamic Driving Systems PDFjetdedeNo ratings yet
- ALP Material Lift GBDocument8 pagesALP Material Lift GByessica laraNo ratings yet
- 2Document44 pages2Vijaya SarathiNo ratings yet
- Computing Applications For Automobile Design and SimulationDocument12 pagesComputing Applications For Automobile Design and SimulationNDL -Qwertys115No ratings yet
- 01-54-03 Steering Wheel - MCF Global PartsDocument2 pages01-54-03 Steering Wheel - MCF Global PartsRubenNo ratings yet
- Yamaha Et300eDocument8 pagesYamaha Et300eSergei UAZ31519No ratings yet
- TH!NK Case Analysis: Write-UpDocument6 pagesTH!NK Case Analysis: Write-UpKyle AlexanderNo ratings yet
- Project Report On Tata MotorDocument43 pagesProject Report On Tata MotorHarshit GroverNo ratings yet
- DAIMLER TRUCKS in India Strategic AnalysisDocument30 pagesDAIMLER TRUCKS in India Strategic Analysisgulrez khanNo ratings yet
- Avanza ChassisDocument24 pagesAvanza ChassisLuqman Pramana SudibyaNo ratings yet
- X-Trail Hybrids Owner Manual ENDocument288 pagesX-Trail Hybrids Owner Manual ENyNo ratings yet
- Bcs - Body Control SystemDocument26 pagesBcs - Body Control SystemBRILLIANCE AUTO LIFENo ratings yet
- Potsdam Village Police Dept. Blotter Jan. 30, 2016Document3 pagesPotsdam Village Police Dept. Blotter Jan. 30, 2016NewzjunkyNo ratings yet
- Cummins Error CodesDocument6 pagesCummins Error CodesMoez KarouiNo ratings yet
- I - 311 Range Hydrostatic Transmission Bf4m2011 Hydraulic DiagramDocument1 pageI - 311 Range Hydrostatic Transmission Bf4m2011 Hydraulic DiagramluifershadowsNo ratings yet
- Munal de Partes Genie GS84 GS90Document252 pagesMunal de Partes Genie GS84 GS90fernandoNo ratings yet
- On TeslaDocument5 pagesOn Teslamannu02.manishNo ratings yet
- Additional Headlight Retrofit F56Document19 pagesAdditional Headlight Retrofit F56Felipe LorcaNo ratings yet
- 32mgp6010 Cbr1000rrc Owners ManualDocument136 pages32mgp6010 Cbr1000rrc Owners ManualLuiz Alexandre Soubhia BikestoreNo ratings yet









































































Download as docx, pdf, or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- 50 Point ATV Inspection FormDocument1 page50 Point ATV Inspection FormJuan Forte100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- VW 4 Cylinder Diesel Engine 1.9L Engine Workshop ManualDocument278 pagesVW 4 Cylinder Diesel Engine 1.9L Engine Workshop ManualCar TrendNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 04 - E90 PowertrainDocument18 pages04 - E90 Powertrainjapspeed80% (5)
- Deutz Engine Model Serial NumberDocument28 pagesDeutz Engine Model Serial NumberanggieNo ratings yet
- Recent Gas Metal Arc Welding (GMAW) Process Developments - The Implications Related To International Fabrication StandardsDocument13 pagesRecent Gas Metal Arc Welding (GMAW) Process Developments - The Implications Related To International Fabrication StandardsShashank AnandNo ratings yet
- BAJA SAEINDIA 2020 - CAE Award Poster FormatDocument1 pageBAJA SAEINDIA 2020 - CAE Award Poster FormatShashank AnandNo ratings yet
- Minor Project: Submitted By:-Anurag Aggarwal Sahil Sharma Amrit Singh Vivek PrasadDocument15 pagesMinor Project: Submitted By:-Anurag Aggarwal Sahil Sharma Amrit Singh Vivek PrasadShashank AnandNo ratings yet
- Turbulent Boundary Layer Theory and Its Application ' To Blade Profile Design "Document71 pagesTurbulent Boundary Layer Theory and Its Application ' To Blade Profile Design "Shashank AnandNo ratings yet
- Golf 4 - OsiguračiDocument7 pagesGolf 4 - OsiguračiСтеван КовачNo ratings yet
- Checklist C150F CC-LHN (Rev. Abr.2021)Document2 pagesChecklist C150F CC-LHN (Rev. Abr.2021)Sebastian Emilio Alvarado Zambrano100% (1)
- 06b - Prop ControlDocument1 page06b - Prop Controljbert55No ratings yet
- Soilmec SR-125 HIT Hydraulic Rotary Rig (April 2016)Document12 pagesSoilmec SR-125 HIT Hydraulic Rotary Rig (April 2016)sandycastleNo ratings yet
- 47.mewp Check List Unisco (F) - 47Document1 page47.mewp Check List Unisco (F) - 47ibrahimNo ratings yet
- Radio Renault Megane II (Bm01 - , Cm01 - ) 1.4 16v (Bm0b, Cm0b) 1992252 B-PartsDocument1 pageRadio Renault Megane II (Bm01 - , Cm01 - ) 1.4 16v (Bm0b, Cm0b) 1992252 B-Partspoba05No ratings yet
- How To Change Front Suspension Strut On Citroen Xsara Coupe n0 Replacement GuideDocument25 pagesHow To Change Front Suspension Strut On Citroen Xsara Coupe n0 Replacement Guidematej89No ratings yet
- BMW E87 Vehicle Chassis Suspension and Dynamic Driving Systems PDFDocument40 pagesBMW E87 Vehicle Chassis Suspension and Dynamic Driving Systems PDFjetdedeNo ratings yet
- ALP Material Lift GBDocument8 pagesALP Material Lift GByessica laraNo ratings yet
- 2Document44 pages2Vijaya SarathiNo ratings yet
- Computing Applications For Automobile Design and SimulationDocument12 pagesComputing Applications For Automobile Design and SimulationNDL -Qwertys115No ratings yet
- 01-54-03 Steering Wheel - MCF Global PartsDocument2 pages01-54-03 Steering Wheel - MCF Global PartsRubenNo ratings yet
- Yamaha Et300eDocument8 pagesYamaha Et300eSergei UAZ31519No ratings yet
- TH!NK Case Analysis: Write-UpDocument6 pagesTH!NK Case Analysis: Write-UpKyle AlexanderNo ratings yet
- Project Report On Tata MotorDocument43 pagesProject Report On Tata MotorHarshit GroverNo ratings yet
- DAIMLER TRUCKS in India Strategic AnalysisDocument30 pagesDAIMLER TRUCKS in India Strategic Analysisgulrez khanNo ratings yet
- Avanza ChassisDocument24 pagesAvanza ChassisLuqman Pramana SudibyaNo ratings yet
- X-Trail Hybrids Owner Manual ENDocument288 pagesX-Trail Hybrids Owner Manual ENyNo ratings yet
- Bcs - Body Control SystemDocument26 pagesBcs - Body Control SystemBRILLIANCE AUTO LIFENo ratings yet
- Potsdam Village Police Dept. Blotter Jan. 30, 2016Document3 pagesPotsdam Village Police Dept. Blotter Jan. 30, 2016NewzjunkyNo ratings yet
- Cummins Error CodesDocument6 pagesCummins Error CodesMoez KarouiNo ratings yet
- I - 311 Range Hydrostatic Transmission Bf4m2011 Hydraulic DiagramDocument1 pageI - 311 Range Hydrostatic Transmission Bf4m2011 Hydraulic DiagramluifershadowsNo ratings yet
- Munal de Partes Genie GS84 GS90Document252 pagesMunal de Partes Genie GS84 GS90fernandoNo ratings yet
- On TeslaDocument5 pagesOn Teslamannu02.manishNo ratings yet
- Additional Headlight Retrofit F56Document19 pagesAdditional Headlight Retrofit F56Felipe LorcaNo ratings yet
- 32mgp6010 Cbr1000rrc Owners ManualDocument136 pages32mgp6010 Cbr1000rrc Owners ManualLuiz Alexandre Soubhia BikestoreNo ratings yet