
CS 231A Computer Vision Midterm: 1 Multiple Choice (22 Points)
CS 231A Computer Vision Midterm: 1 Multiple Choice (22 Points)
You might also like
- Advanced Algorithms MCQDocument14 pagesAdvanced Algorithms MCQmathuNo ratings yet
- Introduction To Computer Graphics V1Document5 pagesIntroduction To Computer Graphics V1solvedcareNo ratings yet
- DIP Unit 2 MCQDocument8 pagesDIP Unit 2 MCQSanthosh PaNo ratings yet
- ML MCQDocument31 pagesML MCQChinmay Gaikwad100% (2)
- MT1SP19Document13 pagesMT1SP19HasimNo ratings yet
- Kidney Stone DetectionDocument15 pagesKidney Stone DetectionSai Kumar0% (1)
- Midterm SolutionDocument11 pagesMidterm Solutionfrozenfire310803No ratings yet
- CS131 Computer Vision: Foundations and Applications Practice Final (Solution) Stanford University December 11, 2017Document15 pagesCS131 Computer Vision: Foundations and Applications Practice Final (Solution) Stanford University December 11, 2017Huynh Viet TrungNo ratings yet
- SI Sheet 1 SolDocument5 pagesSI Sheet 1 Solطاهر محمدNo ratings yet
- Dip Ii-UnitDocument7 pagesDip Ii-UnitAiswarya SNo ratings yet
- MLT MCQDocument21 pagesMLT MCQSinduja BaskaranNo ratings yet
- MCQs Dumps 2Document15 pagesMCQs Dumps 2surajNo ratings yet
- Midterm F06 SolutionsDocument12 pagesMidterm F06 SolutionsJaweria JaweriaNo ratings yet
- PDA - MCQs Dumps 2Document15 pagesPDA - MCQs Dumps 2Subhransu Sekhar DasNo ratings yet
- Computer Vision MCQ's For InterviewDocument12 pagesComputer Vision MCQ's For InterviewMallikarjun patilNo ratings yet
- Image Processing ProjectDocument3 pagesImage Processing ProjecthassanNo ratings yet
- Assignment 2: Introduction To Machine Learning Prof. B. RavindranDocument3 pagesAssignment 2: Introduction To Machine Learning Prof. B. RavindranVijayramasamyNo ratings yet
- Qcm1 February 2015 424 CorrigeDocument10 pagesQcm1 February 2015 424 CorrigeFlorian DupuyNo ratings yet
- Digital Image and Video Processing - 2012Document7 pagesDigital Image and Video Processing - 2012rohitNo ratings yet
- Ee610 hw2 Au23Document3 pagesEe610 hw2 Au23Manish kumawatNo ratings yet
- Exam 2020Document9 pagesExam 2020Aavesh DagarNo ratings yet
- Model Qpaper GeDocument10 pagesModel Qpaper GeMr V. Phaninder ReddyNo ratings yet
- Model Qpaper GeDocument10 pagesModel Qpaper Geसोनू जगतापNo ratings yet
- Assignment 12: Introduction To Machine Learning Prof. B. RavindranDocument4 pagesAssignment 12: Introduction To Machine Learning Prof. B. RavindranPraveen Kumar Kandhala100% (1)
- Linear Algebra: Camera CalibrationDocument19 pagesLinear Algebra: Camera CalibrationSamuel DharmaNo ratings yet
- EM May 2021Document3 pagesEM May 2021Shivam YadavNo ratings yet
- Image ProcessingDocument2 pagesImage Processingpreksharadadiya2310No ratings yet
- Mid-Term Exam. Feb. 2021 Computer Graphics (Etcs-211) Time:1Hr. M.M. - 30Document4 pagesMid-Term Exam. Feb. 2021 Computer Graphics (Etcs-211) Time:1Hr. M.M. - 30GauravNo ratings yet
- Midterm PrinciplesDocument8 pagesMidterm Principlesarshad_pmadNo ratings yet
- Course Work PhysicsDocument6 pagesCourse Work Physicskhanoud780No ratings yet
- Quiz 1 CVDocument2 pagesQuiz 1 CVasmaelghoul13No ratings yet
- Computer Graphics ++Document189 pagesComputer Graphics ++Harry JackNo ratings yet
- COMP90038 Practice Exam Paper (2) : Dit?usp SharingDocument15 pagesCOMP90038 Practice Exam Paper (2) : Dit?usp SharingAnupa AlexNo ratings yet
- Solutions To Practice Sheet: FL 1: Introduction To Soft ComputingDocument3 pagesSolutions To Practice Sheet: FL 1: Introduction To Soft ComputingEr Farzan UllahNo ratings yet
- Final 2008 FDocument18 pagesFinal 2008 FMuhammad MurtazaNo ratings yet
- MidSQ Image ProcessingDocument29 pagesMidSQ Image Processingsimgeuckun1No ratings yet
- LowFrameRateTracking 1Document8 pagesLowFrameRateTracking 1Saeideh OraeiNo ratings yet
- Digital Image Processing: Midterm ExamDocument15 pagesDigital Image Processing: Midterm ExamLeandro PaivaNo ratings yet
- Final PracticeDocument68 pagesFinal PracticekhawirNo ratings yet
- Digital Image Processing QB 2017 - 18Document9 pagesDigital Image Processing QB 2017 - 18PrakherGuptaNo ratings yet
- DS 432 Assignment I 2020Document7 pagesDS 432 Assignment I 2020sristi agrawalNo ratings yet
- Wa0006.Document4 pagesWa0006.geeta sreeNo ratings yet
- IIP Midterm SolDocument7 pagesIIP Midterm SolSacky SackNo ratings yet
- Week 5Document9 pagesWeek 5sachinNo ratings yet
- An Introduction To JPEG Compression Using Matlab: Arno Swart 30 October, 2003Document6 pagesAn Introduction To JPEG Compression Using Matlab: Arno Swart 30 October, 2003ankancemk0422No ratings yet
- Btech Ece 8 Sem Digital Image Processing 2011Document7 pagesBtech Ece 8 Sem Digital Image Processing 2011Abhijit DasNo ratings yet
- Coursehero 34726625 PDFDocument11 pagesCoursehero 34726625 PDFScarletNo ratings yet
- Assignment 3: Introduction To Machine Learning Prof. B. RavindranDocument4 pagesAssignment 3: Introduction To Machine Learning Prof. B. RavindranVijayramasamyNo ratings yet
- An Introduction To JPEG Compression Using Matlab: Arno Swart 28th October 2003Document5 pagesAn Introduction To JPEG Compression Using Matlab: Arno Swart 28th October 2003infiniti47No ratings yet
- Assignment 2: Introduction To Machine Learning Prof. B. RavindranDocument3 pagesAssignment 2: Introduction To Machine Learning Prof. B. RavindranPraveen Kumar Kandhala100% (1)
- Unit 3 MCQDocument20 pagesUnit 3 MCQSaloni WaikarNo ratings yet
- Image Processing QuestionsDocument4 pagesImage Processing QuestionsabhinavNo ratings yet
- Quiz AnswersDocument5 pagesQuiz AnswersSandeep SinghNo ratings yet
- Master's Numerical Test 2 - DEC2020Document2 pagesMaster's Numerical Test 2 - DEC2020Mohamad AfiqNo ratings yet
- 5 MCQ LR No AnswerDocument12 pages5 MCQ LR No AnswerĐồng Dương100% (1)
- Operation Research HomeworkDocument7 pagesOperation Research HomeworkThuyết Trương DũngNo ratings yet
- 11-Corr & RegDocument7 pages11-Corr & Regbujobyjojo12No ratings yet
- Jpeg PDFDocument9 pagesJpeg PDFAvinashKumarNo ratings yet
- Assignment 4 (Sol.) : Introduction To Machine Learning Prof. B. RavindranDocument4 pagesAssignment 4 (Sol.) : Introduction To Machine Learning Prof. B. RavindranByron Xavier Lima CedilloNo ratings yet
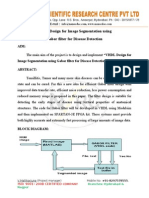
- VHDL Design For Image Segmentation Using Gabor Filter For Disease DetectionDocument3 pagesVHDL Design For Image Segmentation Using Gabor Filter For Disease DetectionNsrc Nano ScientifcNo ratings yet
- Enhance Security Using Cancellable Biometric Key GenerationDocument11 pagesEnhance Security Using Cancellable Biometric Key GenerationlambanaveenNo ratings yet
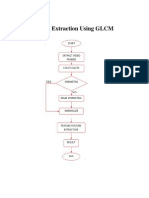
- Feature Extraction Using GLCM (Mamography)Document3 pagesFeature Extraction Using GLCM (Mamography)him1234567890No ratings yet
- Electronics 07 00302 PDFDocument28 pagesElectronics 07 00302 PDFsobako123No ratings yet
- Phase-Video (Motion Amplification)Document9 pagesPhase-Video (Motion Amplification)HeviiNo ratings yet
- (Download PDF) Image Operators Image Processing in Python 1St Edition Jason M Kinser Online Ebook All Chapter PDFDocument24 pages(Download PDF) Image Operators Image Processing in Python 1St Edition Jason M Kinser Online Ebook All Chapter PDFrobert.vanwinkle844100% (14)
- Face Recognition Using Gabor Filters: Muhammad SHARIF, Adeel KHALID, Mudassar RAZA, Sajjad MOHSINDocument5 pagesFace Recognition Using Gabor Filters: Muhammad SHARIF, Adeel KHALID, Mudassar RAZA, Sajjad MOHSINYuri BrasilkaNo ratings yet
- Gabor FilterDocument7 pagesGabor FilterMr. Akhil WaliaNo ratings yet
- Gabor FiltersDocument6 pagesGabor Filtersarul_elvisNo ratings yet
- Fuel Nozzle Presentation Fit ConferenceDocument22 pagesFuel Nozzle Presentation Fit ConferenceKashif Aziz AwanNo ratings yet
- CS 231A Computer Vision Midterm: 1 Multiple Choice (22 Points)Document20 pagesCS 231A Computer Vision Midterm: 1 Multiple Choice (22 Points)Goel MakagNo ratings yet
- Iris Recognition ThesisDocument61 pagesIris Recognition Thesisshereenkhan120No ratings yet
- Chaudhary2012 PDFDocument5 pagesChaudhary2012 PDFSnehaNo ratings yet
- Feature Extraction Gabor FiltersDocument2 pagesFeature Extraction Gabor FiltersZeeshan AslamNo ratings yet
- Fusion of Gabor Filter and Steerable Pyramid To Improve Iris Recognition SystemDocument9 pagesFusion of Gabor Filter and Steerable Pyramid To Improve Iris Recognition SystemIAES IJAINo ratings yet
- Identification of Identical Twins Using Face Recognition With ResultsDocument6 pagesIdentification of Identical Twins Using Face Recognition With ResultsEditor IJRITCCNo ratings yet
- 2 - Feature Representation and DescriptionDocument47 pages2 - Feature Representation and Description张子邺No ratings yet
- Fast Separable Gabor Filter - AreekulDocument7 pagesFast Separable Gabor Filter - AreekulNamezz Ruangsakul PNo ratings yet
- Palm and Dorsal Hand VeinDocument4 pagesPalm and Dorsal Hand VeinVignesh Manju100% (1)
- Texture Analysis Using Gabor FiltersDocument38 pagesTexture Analysis Using Gabor FiltersRajkumar KondappanNo ratings yet
- Features Extraction Using A Gabor Filter FamilyDocument6 pagesFeatures Extraction Using A Gabor Filter FamilyJigme L. LepchaNo ratings yet
- Final Doc Cbir (Content Based Image Retrieval) in Matlab Using Gabor WaveletDocument69 pagesFinal Doc Cbir (Content Based Image Retrieval) in Matlab Using Gabor WaveletSatyam Yadav100% (1)
- Gabor FilterDocument3 pagesGabor FilterArunPandiyanNo ratings yet
- Chisti 2d Gabor FilterDocument17 pagesChisti 2d Gabor FilterChistiMonuNo ratings yet
- Journal of Visual Communication and Image Representation: SciencedirectDocument31 pagesJournal of Visual Communication and Image Representation: SciencedirectOber Van Gómez LópezNo ratings yet
- Chap3 Image Processing (2018)Document35 pagesChap3 Image Processing (2018)mariana mourãoNo ratings yet
- Fingerprint Based AttendanceDocument87 pagesFingerprint Based AttendanceGhodake Siddaram33% (3)
- Edge Detection Techniques in Processing Digital Images: Investigation of Canny Algorithm and Gabor MethodDocument6 pagesEdge Detection Techniques in Processing Digital Images: Investigation of Canny Algorithm and Gabor MethodTI Journals PublishingNo ratings yet
- Ch-7-Multimedia Data Retrieval and ManagementDocument35 pagesCh-7-Multimedia Data Retrieval and ManagementakililuNo ratings yet
























































































Download as pdf or txt
You might also like
- Advanced Algorithms MCQDocument14 pagesAdvanced Algorithms MCQmathuNo ratings yet
- Introduction To Computer Graphics V1Document5 pagesIntroduction To Computer Graphics V1solvedcareNo ratings yet
- DIP Unit 2 MCQDocument8 pagesDIP Unit 2 MCQSanthosh PaNo ratings yet
- ML MCQDocument31 pagesML MCQChinmay Gaikwad100% (2)
- MT1SP19Document13 pagesMT1SP19HasimNo ratings yet
- Kidney Stone DetectionDocument15 pagesKidney Stone DetectionSai Kumar0% (1)
- Midterm SolutionDocument11 pagesMidterm Solutionfrozenfire310803No ratings yet
- CS131 Computer Vision: Foundations and Applications Practice Final (Solution) Stanford University December 11, 2017Document15 pagesCS131 Computer Vision: Foundations and Applications Practice Final (Solution) Stanford University December 11, 2017Huynh Viet TrungNo ratings yet
- SI Sheet 1 SolDocument5 pagesSI Sheet 1 Solطاهر محمدNo ratings yet
- Dip Ii-UnitDocument7 pagesDip Ii-UnitAiswarya SNo ratings yet
- MLT MCQDocument21 pagesMLT MCQSinduja BaskaranNo ratings yet
- MCQs Dumps 2Document15 pagesMCQs Dumps 2surajNo ratings yet
- Midterm F06 SolutionsDocument12 pagesMidterm F06 SolutionsJaweria JaweriaNo ratings yet
- PDA - MCQs Dumps 2Document15 pagesPDA - MCQs Dumps 2Subhransu Sekhar DasNo ratings yet
- Computer Vision MCQ's For InterviewDocument12 pagesComputer Vision MCQ's For InterviewMallikarjun patilNo ratings yet
- Image Processing ProjectDocument3 pagesImage Processing ProjecthassanNo ratings yet
- Assignment 2: Introduction To Machine Learning Prof. B. RavindranDocument3 pagesAssignment 2: Introduction To Machine Learning Prof. B. RavindranVijayramasamyNo ratings yet
- Qcm1 February 2015 424 CorrigeDocument10 pagesQcm1 February 2015 424 CorrigeFlorian DupuyNo ratings yet
- Digital Image and Video Processing - 2012Document7 pagesDigital Image and Video Processing - 2012rohitNo ratings yet
- Ee610 hw2 Au23Document3 pagesEe610 hw2 Au23Manish kumawatNo ratings yet
- Exam 2020Document9 pagesExam 2020Aavesh DagarNo ratings yet
- Model Qpaper GeDocument10 pagesModel Qpaper GeMr V. Phaninder ReddyNo ratings yet
- Model Qpaper GeDocument10 pagesModel Qpaper Geसोनू जगतापNo ratings yet
- Assignment 12: Introduction To Machine Learning Prof. B. RavindranDocument4 pagesAssignment 12: Introduction To Machine Learning Prof. B. RavindranPraveen Kumar Kandhala100% (1)
- Linear Algebra: Camera CalibrationDocument19 pagesLinear Algebra: Camera CalibrationSamuel DharmaNo ratings yet
- EM May 2021Document3 pagesEM May 2021Shivam YadavNo ratings yet
- Image ProcessingDocument2 pagesImage Processingpreksharadadiya2310No ratings yet
- Mid-Term Exam. Feb. 2021 Computer Graphics (Etcs-211) Time:1Hr. M.M. - 30Document4 pagesMid-Term Exam. Feb. 2021 Computer Graphics (Etcs-211) Time:1Hr. M.M. - 30GauravNo ratings yet
- Midterm PrinciplesDocument8 pagesMidterm Principlesarshad_pmadNo ratings yet
- Course Work PhysicsDocument6 pagesCourse Work Physicskhanoud780No ratings yet
- Quiz 1 CVDocument2 pagesQuiz 1 CVasmaelghoul13No ratings yet
- Computer Graphics ++Document189 pagesComputer Graphics ++Harry JackNo ratings yet
- COMP90038 Practice Exam Paper (2) : Dit?usp SharingDocument15 pagesCOMP90038 Practice Exam Paper (2) : Dit?usp SharingAnupa AlexNo ratings yet
- Solutions To Practice Sheet: FL 1: Introduction To Soft ComputingDocument3 pagesSolutions To Practice Sheet: FL 1: Introduction To Soft ComputingEr Farzan UllahNo ratings yet
- Final 2008 FDocument18 pagesFinal 2008 FMuhammad MurtazaNo ratings yet
- MidSQ Image ProcessingDocument29 pagesMidSQ Image Processingsimgeuckun1No ratings yet
- LowFrameRateTracking 1Document8 pagesLowFrameRateTracking 1Saeideh OraeiNo ratings yet
- Digital Image Processing: Midterm ExamDocument15 pagesDigital Image Processing: Midterm ExamLeandro PaivaNo ratings yet
- Final PracticeDocument68 pagesFinal PracticekhawirNo ratings yet
- Digital Image Processing QB 2017 - 18Document9 pagesDigital Image Processing QB 2017 - 18PrakherGuptaNo ratings yet
- DS 432 Assignment I 2020Document7 pagesDS 432 Assignment I 2020sristi agrawalNo ratings yet
- Wa0006.Document4 pagesWa0006.geeta sreeNo ratings yet
- IIP Midterm SolDocument7 pagesIIP Midterm SolSacky SackNo ratings yet
- Week 5Document9 pagesWeek 5sachinNo ratings yet
- An Introduction To JPEG Compression Using Matlab: Arno Swart 30 October, 2003Document6 pagesAn Introduction To JPEG Compression Using Matlab: Arno Swart 30 October, 2003ankancemk0422No ratings yet
- Btech Ece 8 Sem Digital Image Processing 2011Document7 pagesBtech Ece 8 Sem Digital Image Processing 2011Abhijit DasNo ratings yet
- Coursehero 34726625 PDFDocument11 pagesCoursehero 34726625 PDFScarletNo ratings yet
- Assignment 3: Introduction To Machine Learning Prof. B. RavindranDocument4 pagesAssignment 3: Introduction To Machine Learning Prof. B. RavindranVijayramasamyNo ratings yet
- An Introduction To JPEG Compression Using Matlab: Arno Swart 28th October 2003Document5 pagesAn Introduction To JPEG Compression Using Matlab: Arno Swart 28th October 2003infiniti47No ratings yet
- Assignment 2: Introduction To Machine Learning Prof. B. RavindranDocument3 pagesAssignment 2: Introduction To Machine Learning Prof. B. RavindranPraveen Kumar Kandhala100% (1)
- Unit 3 MCQDocument20 pagesUnit 3 MCQSaloni WaikarNo ratings yet
- Image Processing QuestionsDocument4 pagesImage Processing QuestionsabhinavNo ratings yet
- Quiz AnswersDocument5 pagesQuiz AnswersSandeep SinghNo ratings yet
- Master's Numerical Test 2 - DEC2020Document2 pagesMaster's Numerical Test 2 - DEC2020Mohamad AfiqNo ratings yet
- 5 MCQ LR No AnswerDocument12 pages5 MCQ LR No AnswerĐồng Dương100% (1)
- Operation Research HomeworkDocument7 pagesOperation Research HomeworkThuyết Trương DũngNo ratings yet
- 11-Corr & RegDocument7 pages11-Corr & Regbujobyjojo12No ratings yet
- Jpeg PDFDocument9 pagesJpeg PDFAvinashKumarNo ratings yet
- Assignment 4 (Sol.) : Introduction To Machine Learning Prof. B. RavindranDocument4 pagesAssignment 4 (Sol.) : Introduction To Machine Learning Prof. B. RavindranByron Xavier Lima CedilloNo ratings yet
- VHDL Design For Image Segmentation Using Gabor Filter For Disease DetectionDocument3 pagesVHDL Design For Image Segmentation Using Gabor Filter For Disease DetectionNsrc Nano ScientifcNo ratings yet
- Enhance Security Using Cancellable Biometric Key GenerationDocument11 pagesEnhance Security Using Cancellable Biometric Key GenerationlambanaveenNo ratings yet
- Feature Extraction Using GLCM (Mamography)Document3 pagesFeature Extraction Using GLCM (Mamography)him1234567890No ratings yet
- Electronics 07 00302 PDFDocument28 pagesElectronics 07 00302 PDFsobako123No ratings yet
- Phase-Video (Motion Amplification)Document9 pagesPhase-Video (Motion Amplification)HeviiNo ratings yet
- (Download PDF) Image Operators Image Processing in Python 1St Edition Jason M Kinser Online Ebook All Chapter PDFDocument24 pages(Download PDF) Image Operators Image Processing in Python 1St Edition Jason M Kinser Online Ebook All Chapter PDFrobert.vanwinkle844100% (14)
- Face Recognition Using Gabor Filters: Muhammad SHARIF, Adeel KHALID, Mudassar RAZA, Sajjad MOHSINDocument5 pagesFace Recognition Using Gabor Filters: Muhammad SHARIF, Adeel KHALID, Mudassar RAZA, Sajjad MOHSINYuri BrasilkaNo ratings yet
- Gabor FilterDocument7 pagesGabor FilterMr. Akhil WaliaNo ratings yet
- Gabor FiltersDocument6 pagesGabor Filtersarul_elvisNo ratings yet
- Fuel Nozzle Presentation Fit ConferenceDocument22 pagesFuel Nozzle Presentation Fit ConferenceKashif Aziz AwanNo ratings yet
- CS 231A Computer Vision Midterm: 1 Multiple Choice (22 Points)Document20 pagesCS 231A Computer Vision Midterm: 1 Multiple Choice (22 Points)Goel MakagNo ratings yet
- Iris Recognition ThesisDocument61 pagesIris Recognition Thesisshereenkhan120No ratings yet
- Chaudhary2012 PDFDocument5 pagesChaudhary2012 PDFSnehaNo ratings yet
- Feature Extraction Gabor FiltersDocument2 pagesFeature Extraction Gabor FiltersZeeshan AslamNo ratings yet
- Fusion of Gabor Filter and Steerable Pyramid To Improve Iris Recognition SystemDocument9 pagesFusion of Gabor Filter and Steerable Pyramid To Improve Iris Recognition SystemIAES IJAINo ratings yet
- Identification of Identical Twins Using Face Recognition With ResultsDocument6 pagesIdentification of Identical Twins Using Face Recognition With ResultsEditor IJRITCCNo ratings yet
- 2 - Feature Representation and DescriptionDocument47 pages2 - Feature Representation and Description张子邺No ratings yet
- Fast Separable Gabor Filter - AreekulDocument7 pagesFast Separable Gabor Filter - AreekulNamezz Ruangsakul PNo ratings yet
- Palm and Dorsal Hand VeinDocument4 pagesPalm and Dorsal Hand VeinVignesh Manju100% (1)
- Texture Analysis Using Gabor FiltersDocument38 pagesTexture Analysis Using Gabor FiltersRajkumar KondappanNo ratings yet
- Features Extraction Using A Gabor Filter FamilyDocument6 pagesFeatures Extraction Using A Gabor Filter FamilyJigme L. LepchaNo ratings yet
- Final Doc Cbir (Content Based Image Retrieval) in Matlab Using Gabor WaveletDocument69 pagesFinal Doc Cbir (Content Based Image Retrieval) in Matlab Using Gabor WaveletSatyam Yadav100% (1)
- Gabor FilterDocument3 pagesGabor FilterArunPandiyanNo ratings yet
- Chisti 2d Gabor FilterDocument17 pagesChisti 2d Gabor FilterChistiMonuNo ratings yet
- Journal of Visual Communication and Image Representation: SciencedirectDocument31 pagesJournal of Visual Communication and Image Representation: SciencedirectOber Van Gómez LópezNo ratings yet
- Chap3 Image Processing (2018)Document35 pagesChap3 Image Processing (2018)mariana mourãoNo ratings yet
- Fingerprint Based AttendanceDocument87 pagesFingerprint Based AttendanceGhodake Siddaram33% (3)
- Edge Detection Techniques in Processing Digital Images: Investigation of Canny Algorithm and Gabor MethodDocument6 pagesEdge Detection Techniques in Processing Digital Images: Investigation of Canny Algorithm and Gabor MethodTI Journals PublishingNo ratings yet
- Ch-7-Multimedia Data Retrieval and ManagementDocument35 pagesCh-7-Multimedia Data Retrieval and ManagementakililuNo ratings yet