Download as pdf or txt
You might also like
- Project Proposal EditDocument61 pagesProject Proposal EditSamsoul Fakhri0% (1)
- PMDC Index Pakistan of Recognized JournalsDocument3 pagesPMDC Index Pakistan of Recognized JournalsAhmed MateenNo ratings yet
- Managing Digital Marketing 2020 Smart InsightsDocument24 pagesManaging Digital Marketing 2020 Smart InsightsKiều Trinh100% (1)
- MicroPython Program ESP32 - ESP8266 Vs Code and Pymakr - Random Nerd TutorialsDocument38 pagesMicroPython Program ESP32 - ESP8266 Vs Code and Pymakr - Random Nerd TutorialsPablo Gonzalez Robles100% (1)
- AD Based On PhoneDocument11 pagesAD Based On PhoneRivasNo ratings yet
- Paper TE-2Document8 pagesPaper TE-2Sandro SiagianNo ratings yet
- Design and Implementation of Autonomous Quadcopter Using SITL SimulatorDocument16 pagesDesign and Implementation of Autonomous Quadcopter Using SITL SimulatorstefanoNo ratings yet
- A Short Review of The Drone Technology: August 2022Document17 pagesA Short Review of The Drone Technology: August 2022sarthak ghimireNo ratings yet
- A Short Review of The Drone Technology: August 2022Document17 pagesA Short Review of The Drone Technology: August 2022rokomNo ratings yet
- Kangunde2021 Article AReviewOnDronesControlledInReaDocument16 pagesKangunde2021 Article AReviewOnDronesControlledInReahawicha AbomaNo ratings yet
- Design and ImplementationDocument4 pagesDesign and ImplementationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Surveillance Drones and Their ApplicationsDocument4 pagesSurveillance Drones and Their ApplicationsAryan RautNo ratings yet
- Environment MonitoringDocument4 pagesEnvironment MonitoringrandyzzzNo ratings yet
- Flight Controller ForquDocument13 pagesFlight Controller ForquOM SARDESAI225286No ratings yet
- A Survey On Open-Source Flight Control Platforms of Unmanned Aerial VehicleDocument7 pagesA Survey On Open-Source Flight Control Platforms of Unmanned Aerial Vehicle029Muhammad Robith Fikris SholihNo ratings yet
- PDF - Js Viewe5rDocument4 pagesPDF - Js Viewe5rPranoy MukherjeeNo ratings yet
- Autonomous Drone For Defence MachineryDocument5 pagesAutonomous Drone For Defence Machinerymanjunathagari gayathriNo ratings yet
- Accelerating Power Grid Monitoring With Flying Robots and Artificial IntelligenceDocument7 pagesAccelerating Power Grid Monitoring With Flying Robots and Artificial IntelligencebenlahnecheNo ratings yet
- Design and Experimental Comparison of PID, LQR and MPC MamboDocument21 pagesDesign and Experimental Comparison of PID, LQR and MPC MamboPedro Cezar Rodrigues BaltazarNo ratings yet
- Sensors 22 03418Document20 pagesSensors 22 03418gryzzlyNo ratings yet
- InitialProjectProposal PDFDocument7 pagesInitialProjectProposal PDFHendrawanAgungPrimadaniNo ratings yet
- A Review On Drones Controlled in Real Ti-1Document15 pagesA Review On Drones Controlled in Real Ti-1Jayashree T R 21PHD1140No ratings yet
- Exploratory Project IT Task 9Document5 pagesExploratory Project IT Task 9Srikaran GamesNo ratings yet
- Drone Workshop PPT UpdatedDocument34 pagesDrone Workshop PPT UpdatedDharmik TrivediNo ratings yet
- DRONE PPT TTTTTTTTDocument15 pagesDRONE PPT TTTTTTTTPragatiNo ratings yet
- SABA WorksheetDocument11 pagesSABA Worksheetjetlysaba2003No ratings yet
- DE6 Report - 1Document24 pagesDE6 Report - 1Vishal ChudasamaNo ratings yet
- Sky Cargo: Self-Navigating Delivery DroneDocument7 pagesSky Cargo: Self-Navigating Delivery DroneInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Hawk Eye Unmanned Aerial Vehicle For MonitoringDocument7 pagesHawk Eye Unmanned Aerial Vehicle For MonitoringIJRASETPublicationsNo ratings yet
- chapter 1 demoDocument6 pageschapter 1 demoteddyabere444No ratings yet
- Internet Controlled DroneDocument7 pagesInternet Controlled DroneIJRASETPublicationsNo ratings yet
- A Survey of Open-Source UAV Flight Controllers and Flight SimulatorsDocument13 pagesA Survey of Open-Source UAV Flight Controllers and Flight Simulators029Muhammad Robith Fikris SholihNo ratings yet
- GUI Controlled Aerial Drone: Kartik Panicker, Vaibhav Murkute, Deepak Padhi, Akash NarkhedeDocument3 pagesGUI Controlled Aerial Drone: Kartik Panicker, Vaibhav Murkute, Deepak Padhi, Akash NarkhedeerpublicationNo ratings yet
- Gesture Controlled Drone SystemDocument37 pagesGesture Controlled Drone SystemDeeptanshuNo ratings yet
- Development of an Autonomous Drone for Surveillance ApplicationDocument4 pagesDevelopment of an Autonomous Drone for Surveillance Applicationamal.es23No ratings yet
- Quadcopter Research PaperDocument5 pagesQuadcopter Research Papergmannevnd100% (1)
- 25 Digital20 Avionics Pastor PDFDocument9 pages25 Digital20 Avionics Pastor PDF083898025012No ratings yet
- A Review and Progress of Research On Autonomous Drone in Agriculture, Delivering Items and Geographical Information Systems (GIS)Document5 pagesA Review and Progress of Research On Autonomous Drone in Agriculture, Delivering Items and Geographical Information Systems (GIS)winstonhacketNo ratings yet
- Adetona Victor Adewole Qts - 2016 - 011 Assignment 2Document17 pagesAdetona Victor Adewole Qts - 2016 - 011 Assignment 2Victor AdetonaNo ratings yet
- Design and Implementation of An Unmanned Ground Vehicle For Security ApplicationsDocument7 pagesDesign and Implementation of An Unmanned Ground Vehicle For Security Applicationsvihang pathakNo ratings yet
- Aircraft Wing ConstructionDocument8 pagesAircraft Wing ConstructionNellaiappa1975 DuraiNo ratings yet
- Design and Development of Surveillance DroneDocument5 pagesDesign and Development of Surveillance DroneIJRASETPublicationsNo ratings yet
- Een Oen 498 - Pre ProposalDocument14 pagesEen Oen 498 - Pre Proposalapi-296881750No ratings yet
- Low-Cost Environmental Monitoring Mini Rover Based On IoT TechnologyDocument9 pagesLow-Cost Environmental Monitoring Mini Rover Based On IoT TechnologyYetmwork TesfayeNo ratings yet
- Autonomousquad Final3Document7 pagesAutonomousquad Final3Kanekii HaiseNo ratings yet
- MidTerm AutonomousQuad TextDocument7 pagesMidTerm AutonomousQuad TextHoang PhamNo ratings yet
- Control System For Unmanned Aerial Vehicles: Ond Rej Spinka, ST Ep An Kroupa, Zden Ek Hanz AlekDocument6 pagesControl System For Unmanned Aerial Vehicles: Ond Rej Spinka, ST Ep An Kroupa, Zden Ek Hanz AlekArief Ramadhan PulunganNo ratings yet
- Identitas JurnalDocument15 pagesIdentitas JurnalihsanNo ratings yet
- JayanDocument3 pagesJayanzack988No ratings yet
- Spy RobotDocument7 pagesSpy RobotIJRASETPublicationsNo ratings yet
- Drones 07 00682Document18 pagesDrones 07 00682ControlSI PeruNo ratings yet
- Review PaperDocument15 pagesReview Paperdre98makNo ratings yet
- Autonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniDocument7 pagesAutonomous UAV With Human Detection: Kshitij Karnawat, Nihar Asare, Sumit Anilkumar Singh, and Anju KulkarniexampleNo ratings yet
- Seminar ReportDocument16 pagesSeminar ReportYash AkoleNo ratings yet
- Spy Bot Surveillence Based On Wi-Fi TechnologyDocument6 pagesSpy Bot Surveillence Based On Wi-Fi TechnologyaryanNo ratings yet
- PID control of quadrotor UAVs A surveyDocument21 pagesPID control of quadrotor UAVs A surveyThái Xuân KhánhNo ratings yet
- Autonomous Vision-Based Target Detection and Safe Landing For UAVDocument13 pagesAutonomous Vision-Based Target Detection and Safe Landing For UAVAlexander CasallasNo ratings yet
- Mini Drone: Karan Ashwin AshutoshDocument14 pagesMini Drone: Karan Ashwin AshutoshAshutosh DeshpandeNo ratings yet
- Jeta V3i3p101Document3 pagesJeta V3i3p101Slakshmi NarayanaNo ratings yet
- 1159pm 20.epra Journals-6704Document7 pages1159pm 20.epra Journals-6704Akash ShevateNo ratings yet
- HGC Camera ReadyDocument9 pagesHGC Camera ReadySAHITHLAL HOWDEKARNo ratings yet
- Drone Chapter 1Document9 pagesDrone Chapter 1Justine Ronald CORTEZNo ratings yet
- Rapid Prototyping Software for Avionics Systems: Model-oriented Approaches for Complex Systems CertificationFrom EverandRapid Prototyping Software for Avionics Systems: Model-oriented Approaches for Complex Systems CertificationNo ratings yet
- Pharmaceutical SciencesDocument5 pagesPharmaceutical SciencesAhmed MateenNo ratings yet
- Internet Based Smart Poultry FarmDocument5 pagesInternet Based Smart Poultry FarmAhmed MateenNo ratings yet
- Hierarchical Image Segmentation by Polygon GroupingDocument8 pagesHierarchical Image Segmentation by Polygon GroupingAhmed MateenNo ratings yet
- Weed Detection and Classification For Autonomous Farming: S. Kodagoda, Z. Zhang, D. Ruiz, G. DissanayakeDocument6 pagesWeed Detection and Classification For Autonomous Farming: S. Kodagoda, Z. Zhang, D. Ruiz, G. DissanayakeAhmed MateenNo ratings yet
- 10 1 1 592 3046 PDFDocument8 pages10 1 1 592 3046 PDFAhmed MateenNo ratings yet
- Discovery of Network Elements and Reconciliation (Dner)Document6 pagesDiscovery of Network Elements and Reconciliation (Dner)Ahmed MateenNo ratings yet
- Range Image Segmentation Using A LEGION NetworkDocument19 pagesRange Image Segmentation Using A LEGION NetworkAhmed MateenNo ratings yet
- Guidlines For Approved SupervisorsDocument5 pagesGuidlines For Approved SupervisorsAhmed MateenNo ratings yet
- Paper 1Document36 pagesPaper 1Ahmed MateenNo ratings yet
- Formal Language and Automata TheoryDocument136 pagesFormal Language and Automata TheoryAhmed MateenNo ratings yet
- Dsman Punja Bu M B oDocument318 pagesDsman Punja Bu M B oadilshahkazmi100% (1)
- Al Quran 13 Lines TajwediDocument881 pagesAl Quran 13 Lines TajwediAhmed MateenNo ratings yet
- Electricity BillDocument2 pagesElectricity BillAhmed MateenNo ratings yet
- Theory of Formal Languages Lec1Document15 pagesTheory of Formal Languages Lec1Ahmed MateenNo ratings yet
- EVALUATED RECEIPT SETTLEMENTS in SAPDocument13 pagesEVALUATED RECEIPT SETTLEMENTS in SAPMounir ChadouliNo ratings yet
- SVMX101 ILT Workbook - CORE 22.1 LightningDocument88 pagesSVMX101 ILT Workbook - CORE 22.1 LightningRygel OrionisNo ratings yet
- DEFCON 22 Lucas Morris Michael McAtee ShareEnum We Wrapped SambaDocument23 pagesDEFCON 22 Lucas Morris Michael McAtee ShareEnum We Wrapped SambaSudhanshu Shekhar SharmaNo ratings yet
- Test AkademieDocument3 pagesTest AkademiesilwataNo ratings yet
- Section01 Introduction & SpecsDocument12 pagesSection01 Introduction & Specssertecs polNo ratings yet
- Detailed Fitness For Service Per API 579Document3 pagesDetailed Fitness For Service Per API 579Sajal KulshresthaNo ratings yet
- Guidelines For Implementation of VTMS v3Document6 pagesGuidelines For Implementation of VTMS v3shafin bpNo ratings yet
- Biotechnology PolicyDocument56 pagesBiotechnology PolicyKajan Muneeswaran100% (1)
- Brochure Kompakte TemperiergeraeteDocument52 pagesBrochure Kompakte TemperiergeraeteEmirosvaldoNo ratings yet
- Grid Automation Webinar Series: Hitachi Abb Power Grids Powering Good For Sustainable EnergyDocument30 pagesGrid Automation Webinar Series: Hitachi Abb Power Grids Powering Good For Sustainable EnergyRidouan HijeNo ratings yet
- Be Enc 2020Document10 pagesBe Enc 2020Shaikh FarooqNo ratings yet
- Digital Subscriber Line - DSL: Modem TechnologyDocument29 pagesDigital Subscriber Line - DSL: Modem TechnologyKiran AmbekarNo ratings yet
- Sap BW Business Content: Linkedinfacebook EmailshareDocument13 pagesSap BW Business Content: Linkedinfacebook EmailshareManohar GoudNo ratings yet
- Cpu Final NotesDocument6 pagesCpu Final NotesSonu zehen001No ratings yet
- Oscillator CircuitsDocument19 pagesOscillator Circuits21-08523No ratings yet
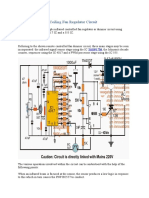
- Remote Controlled Ceiling Fan Regulator CircuitDocument6 pagesRemote Controlled Ceiling Fan Regulator CircuitEngr.Iqbal BaigNo ratings yet
- CO Previous Year O.UDocument7 pagesCO Previous Year O.UVistasNo ratings yet
- 馬來西亞 說明書 PDFDocument6 pages馬來西亞 說明書 PDFChris TiongNo ratings yet
- Data 78Document6 pagesData 78Abhijit BarmanNo ratings yet
- MERN Stack CourseDocument5 pagesMERN Stack Courseneeteshyadav1552003No ratings yet
- PECD Mid - 2 18-19 Question BankDocument2 pagesPECD Mid - 2 18-19 Question BankOsmium kryptonNo ratings yet
- Axyz Toolpath Software Introduction Address Plate 1Document13 pagesAxyz Toolpath Software Introduction Address Plate 1RadoNo ratings yet
- Failed 12Document2 pagesFailed 12subhrajitm47No ratings yet
- Calix C7 Broadband InternetDocument34 pagesCalix C7 Broadband InternetchagantisasikiranNo ratings yet
- Rack 6115Document16 pagesRack 6115gokata86No ratings yet
- Permanent Diagnostic Trouble Codes (DTCS)Document2 pagesPermanent Diagnostic Trouble Codes (DTCS)IAN ALEJANDRO VIDRIOSNo ratings yet
- ASM1 1st DatabaseDesignAndDevelopmentDocument9 pagesASM1 1st DatabaseDesignAndDevelopmenthaihg123zzzNo ratings yet
- Cahier de Charges E-LearningDocument83 pagesCahier de Charges E-LearningAkram Dridi100% (1)