Download as pdf or txt
You might also like
- Medical Office Procedures 10Th Edition Nenna L Bayes Full ChapterDocument67 pagesMedical Office Procedures 10Th Edition Nenna L Bayes Full Chapteralbert.davis797100% (6)
- Necrotic Gnome - Winters Daughter 5eDocument52 pagesNecrotic Gnome - Winters Daughter 5eMc Roxas75% (12)
- Kings Court-Violino 1Document1 pageKings Court-Violino 1lbortolaniNo ratings yet
- MS50295 - 01E Maintenance ScheduleDocument68 pagesMS50295 - 01E Maintenance Schedulevictor baccaNo ratings yet
- Stiffness Method BeamDocument8 pagesStiffness Method BeamMAGED MOHMMED AHMED QASEMNo ratings yet
- Upland Rice Seed Production Project ProposalDocument3 pagesUpland Rice Seed Production Project Proposaljoeeeee100% (3)
- Advanced Finite Element Beams Theory & CalculationsDocument20 pagesAdvanced Finite Element Beams Theory & CalculationsNathaji ShelkeNo ratings yet
- NotesDocument100 pagesNotesLeah TalusigNo ratings yet
- Stiffness Matrix GlobalDocument1 pageStiffness Matrix GlobalYamethaNo ratings yet
- Tugas 2 Portal BidangDocument46 pagesTugas 2 Portal BidangBayu AhmadNo ratings yet
- Zadatak: Formirati Globalnu Matricu Krutosti Prikazanog Okvira Vektor Nepoznatih PomjeranjaDocument4 pagesZadatak: Formirati Globalnu Matricu Krutosti Prikazanog Okvira Vektor Nepoznatih Pomjeranjaemina_hNo ratings yet
- D 4 Development of Beam EquationsDocument1 pageD 4 Development of Beam EquationsAHMED SHAKERNo ratings yet
- Lec10 - CAE - Frame Element ExampleDocument28 pagesLec10 - CAE - Frame Element ExampleAndy PaulNo ratings yet
- Examination Solutions of Simple Buckling Column by Second-Order AnalysisDocument8 pagesExamination Solutions of Simple Buckling Column by Second-Order AnalysiskiddhoNo ratings yet
- Cek Meyy AsmmDocument6 pagesCek Meyy Asmmmrakha adiwNo ratings yet
- Beam Stiffness With A HingeDocument34 pagesBeam Stiffness With A HingeLuiSilvestre Vaca OyolaNo ratings yet
- Lista 1: Universidade de Bras Ilia Faculdade de Tecnologia An Alise Modal ExperimentalDocument13 pagesLista 1: Universidade de Bras Ilia Faculdade de Tecnologia An Alise Modal ExperimentalLucas ArslanianNo ratings yet
- Schema Electrica ChinaDocument1 pageSchema Electrica ChinaEpure GabrielNo ratings yet
- RZQG-L8 (7) Y1B - Installation ManualDocument24 pagesRZQG-L8 (7) Y1B - Installation ManualSorin DiaconuNo ratings yet
- Mackie ProFX16, ProFX22Document30 pagesMackie ProFX16, ProFX22troniNo ratings yet
- Mackie ProFX16, ProFX22 4 Channel SchematicsDocument5 pagesMackie ProFX16, ProFX22 4 Channel SchematicsJames MontalvoNo ratings yet
- Structure I Lecture26Document13 pagesStructure I Lecture26En Ali Ahmed AliNo ratings yet
- Bumblebee HeadDocument1 pageBumblebee HeadsuthirakNo ratings yet
- Qet - KELOMPOK 2Document2 pagesQet - KELOMPOK 2Eko Rizki RamadhaniNo ratings yet
- Fixed End MomentsDocument1 pageFixed End MomentsDaryll TuazonNo ratings yet
- Kuliah 12 - Analisis Struktur - Teorema 3 MomenDocument12 pagesKuliah 12 - Analisis Struktur - Teorema 3 MomenBagas KaraNo ratings yet
- Marengo AustrianDocument1 pageMarengo AustrianJonathan TownsendNo ratings yet
- P7 YS ModellingDocument6 pagesP7 YS Modellingsathiyaseelann.sNo ratings yet
- Rubber Ball Clean System ManualDocument4 pagesRubber Ball Clean System ManualAlvinNo ratings yet
- S Cs S Cs Cs C Cs C EA T K T: Formula Sheet 2D Truss TransformationsDocument1 pageS Cs S Cs Cs C Cs C EA T K T: Formula Sheet 2D Truss Transformationsabhinav aravindNo ratings yet
- Lap Gz. BTG Juni 2021Document18 pagesLap Gz. BTG Juni 2021WinarsoNo ratings yet
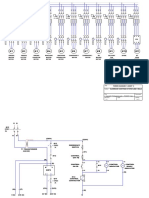
- ELA1800HD Electrical Schematic REVISION:H19IIZ2 5000ppm: L1 QS1 KM1 QF1Document3 pagesELA1800HD Electrical Schematic REVISION:H19IIZ2 5000ppm: L1 QS1 KM1 QF1julianariasg0% (1)
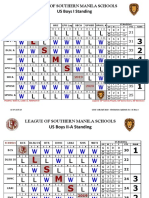
- LSMS Volleyball 2019 Eliminations As of 2019.10.05Document16 pagesLSMS Volleyball 2019 Eliminations As of 2019.10.05xoNo ratings yet
- Chapter 3-1Document20 pagesChapter 3-1Mohammed M. ShobakiNo ratings yet
- Lecture013-Module 3 - Matrix Stiffness Method - Fall 2021 PART 3Document50 pagesLecture013-Module 3 - Matrix Stiffness Method - Fall 2021 PART 3Prateek Soumya SharmaNo ratings yet
- 9591-102-102-PVM-F-010-03 Cold AirDocument3 pages9591-102-102-PVM-F-010-03 Cold AirVijay PalNo ratings yet
- Stiffness Matrix of Euler-Bernoulli and Timoshenko Straight BeamsDocument9 pagesStiffness Matrix of Euler-Bernoulli and Timoshenko Straight BeamsCaio OmarNo ratings yet
- Wzmacniacz - ElementyDocument1 pageWzmacniacz - ElementyglodwaclawNo ratings yet
- K8422 of No.820 SQN FAA 1940: Fairey Swordfish MK 1Document3 pagesK8422 of No.820 SQN FAA 1940: Fairey Swordfish MK 1Lorenzo Martinez Valenzuela100% (1)
- No Uraian Kategori Umur PenyakitDocument18 pagesNo Uraian Kategori Umur Penyakitdawan 1No ratings yet
- KekakuanDocument7 pagesKekakuanAdnan FernandaNo ratings yet
- HeredogramaDocument1 pageHeredogramaKalebe AssisNo ratings yet
- Control PBDocument1 pageControl PBsanty sarabiaNo ratings yet
- Jhonson 4bitsDocument1 pageJhonson 4bitschristianNo ratings yet
- 4.3 Examples of Beam Analysis Using The Direct Stiffness MethodDocument1 page4.3 Examples of Beam Analysis Using The Direct Stiffness MethodAHMED SHAKERNo ratings yet
- Restaurant Le Patio Coffret Type ChambreDocument1 pageRestaurant Le Patio Coffret Type ChambreEmmanuelNo ratings yet
- Blowroom NewDocument16 pagesBlowroom NewNiko SaputraNo ratings yet
- Mckee Andy-When She CriesDocument23 pagesMckee Andy-When She CriesDawid ŻarnowskiNo ratings yet
- KHKGDocument1 pageKHKG21-00821No ratings yet
- Finite Element Method: Beam AnalysisDocument10 pagesFinite Element Method: Beam AnalysisZaffira RahmanNo ratings yet
- 41-Ground Floor Lighting Layout PlanDocument1 page41-Ground Floor Lighting Layout PlanVictor PrinceNo ratings yet
- Math2 L13.2 Capacity Math WorksheetDocument6 pagesMath2 L13.2 Capacity Math Worksheetstu715914032No ratings yet
- WT01Document1 pageWT01erattakoyaNo ratings yet
- 1st Floor Beam LayoutlDocument1 page1st Floor Beam LayoutlGayan IndunilNo ratings yet
- Sultan Ahmet Camii - Paper 3D Model PDFDocument30 pagesSultan Ahmet Camii - Paper 3D Model PDFislamimedya100% (2)
- ICOM IC 7410 Service Manual Trang 6Document1 pageICOM IC 7410 Service Manual Trang 6quangtiendt05No ratings yet
- 2402 X MP PLN Plot Op1 ColorDocument1 page2402 X MP PLN Plot Op1 ColorThinh NguyenNo ratings yet
- SBBR pdc-1 PDC 20220714Document2 pagesSBBR pdc-1 PDC 20220714vitor marianoNo ratings yet
- 4.2 Example of Assemblage of Beam Stiffness Matrices DDocument1 page4.2 Example of Assemblage of Beam Stiffness Matrices DAHMED SHAKERNo ratings yet
- Weeping Willow: Blind Boy FullerDocument2 pagesWeeping Willow: Blind Boy FullersantiagoNo ratings yet
- MPN Table for WaterDocument3 pagesMPN Table for Waterav.hraadNo ratings yet
- krisAR 2016 2017Document86 pageskrisAR 2016 2017sharkl123No ratings yet
- Competency Level Employers ExpectationsDocument17 pagesCompetency Level Employers ExpectationsCarmelo AlejandrinoNo ratings yet
- Plugin For Sketchup Cleanup - Download Tutorial Sketchup (PDFDrive)Document46 pagesPlugin For Sketchup Cleanup - Download Tutorial Sketchup (PDFDrive)sham_codeNo ratings yet
- CONFIRMALDocument50 pagesCONFIRMALSri SaiNo ratings yet
- Acknowledgement (Draft 2) : IntroductionDocument3 pagesAcknowledgement (Draft 2) : IntroductionSHAIK AASHIQUE RASOOL ARCH-UG- 2018 BATCHNo ratings yet
- Insights Into Formulation Technologies and Novel Strategies For The Design of Orally Disintegrating Dosage Forms: A Comprehensive Industrial ReviewDocument13 pagesInsights Into Formulation Technologies and Novel Strategies For The Design of Orally Disintegrating Dosage Forms: A Comprehensive Industrial ReviewROBINNo ratings yet
- Recipe Slow Cooker Chicken TacosDocument10 pagesRecipe Slow Cooker Chicken TacosVincent ReyesNo ratings yet
- Let's Get Scotland Walking - The National Walking Strategy - Escócia - 2019Document29 pagesLet's Get Scotland Walking - The National Walking Strategy - Escócia - 2019Natália CostaNo ratings yet
- Insulated Flooring StanvacDocument7 pagesInsulated Flooring StanvacRamesh RoyNo ratings yet
- Krishna PDFCVDocument4 pagesKrishna PDFCVAVS InfraNo ratings yet
- Study Plan EPE FinalDocument1 pageStudy Plan EPE FinalRamini AshwinNo ratings yet
- Betco ScaffoldDocument52 pagesBetco ScaffoldezzularabNo ratings yet
- Buzan 1993Document27 pagesBuzan 1993Paula CordobaNo ratings yet
- UNDocument419 pagesUNSiti Masruroh ArohNo ratings yet
- ComparativesDocument2 pagesComparativesWIWIK100% (1)
- PHUL Spreadsheet (4 Day Upper/Lower Split)Document8 pagesPHUL Spreadsheet (4 Day Upper/Lower Split)Celeste WalshNo ratings yet
- Role of Commercial Banks in The Economic Development of IndiaDocument5 pagesRole of Commercial Banks in The Economic Development of IndiaGargstudy PointNo ratings yet
- BT1 Handout - 01 Concrete (REV20210114)Document11 pagesBT1 Handout - 01 Concrete (REV20210114)Jano AgbigayNo ratings yet
- Fast Food Nation Book ThesisDocument7 pagesFast Food Nation Book Thesistfwysnikd100% (2)
- Xii CH 1 PPT 1Document92 pagesXii CH 1 PPT 1jiyanshi yadavNo ratings yet
- تقرير الانجليزيDocument2 pagesتقرير الانجليزيbasel.khashashneh.44No ratings yet
- QP Nsep p160Document16 pagesQP Nsep p160Virat KohliNo ratings yet
- Sustainable Incorporation of Lime-Bentonite Clay Composite For Production of Ecofriendly BricksDocument21 pagesSustainable Incorporation of Lime-Bentonite Clay Composite For Production of Ecofriendly BricksWaqas HaroonNo ratings yet
- XZXDocument2 pagesXZXImran Sajid ShahidNo ratings yet
- Competitive Rivalry and Competitive Dynamics: Strategic ManagementDocument42 pagesCompetitive Rivalry and Competitive Dynamics: Strategic ManagementnessieanatashaNo ratings yet
- SPM Add Maths PaperDocument2 pagesSPM Add Maths PaperSEOW INN LEENo ratings yet