Download as docx, pdf, or txt
You might also like
- Geometry SamplerDocument30 pagesGeometry SamplerSusanNo ratings yet
- Week 6B - IsomerismDocument4 pagesWeek 6B - IsomerismMaxNo ratings yet
- On The Integration of Computer Aided Design and Analysis Using The Finite Element Absolute Nodal Coordinate FormulationDocument17 pagesOn The Integration of Computer Aided Design and Analysis Using The Finite Element Absolute Nodal Coordinate FormulationJorge Luis Garcia ZuñigaNo ratings yet
- An Optimization-Based Computational Method For Surface Fitting To Update The Geometric Information of An Existing B-Rep CAD ModelDocument8 pagesAn Optimization-Based Computational Method For Surface Fitting To Update The Geometric Information of An Existing B-Rep CAD ModelAguz JmjNo ratings yet
- A Tracing Method For Parametric Bézier Triangular Surface/ Plane Intersection Over Triangular DomainDocument22 pagesA Tracing Method For Parametric Bézier Triangular Surface/ Plane Intersection Over Triangular DomainzikaNo ratings yet
- Three-Dimensional Beam Element Based On A Cross-Sectional Coordinate System ApproachDocument17 pagesThree-Dimensional Beam Element Based On A Cross-Sectional Coordinate System Approachtadpole10No ratings yet
- Extraction of Boundary Representation From Surface TriangulationsDocument34 pagesExtraction of Boundary Representation From Surface TriangulationsMikael AronssonNo ratings yet
- Generative Modeling: A Symbolic System For Geometric ModelingDocument11 pagesGenerative Modeling: A Symbolic System For Geometric ModelingarqsergioNo ratings yet
- 3D Tool OffsetDocument28 pages3D Tool OffsetKiên Trung NguyễnNo ratings yet
- 2006-Masauda-Preserving Form Features in Interactive MeshDocument18 pages2006-Masauda-Preserving Form Features in Interactive MeshsachinkashidNo ratings yet
- Gibson Et Al. 1997Document33 pagesGibson Et Al. 1997aabb99No ratings yet
- Including Geometric Feature Variations in Tolerance Analysis of Mechanical AssembliesDocument32 pagesIncluding Geometric Feature Variations in Tolerance Analysis of Mechanical AssembliesnaveenNo ratings yet
- Tugas Analisa Struktur RiviewDocument9 pagesTugas Analisa Struktur RiviewFauzan AhmadNo ratings yet
- Technical Talk On CAD: Kurian Antony M.E Cad/CamDocument28 pagesTechnical Talk On CAD: Kurian Antony M.E Cad/Camjust4kurianNo ratings yet
- Unit IV Geometric TransformationDocument31 pagesUnit IV Geometric Transformationvishwajeet patilNo ratings yet
- Optimizing Corner Assignment of Submap SurfacesDocument13 pagesOptimizing Corner Assignment of Submap SurfacesShamik ChowdhuryNo ratings yet
- Emmcvpr2005 RetrievalDocument16 pagesEmmcvpr2005 RetrievalleinimerNo ratings yet
- On The Semantics of Generative Geometry Representations: Purdue E-PubsDocument17 pagesOn The Semantics of Generative Geometry Representations: Purdue E-Pubstuamae mavadiaNo ratings yet
- Paper Goldbach Advanced Building SkinsDocument6 pagesPaper Goldbach Advanced Building SkinsJorge Luis Garcia ZuñigaNo ratings yet
- Boundary-Integral-Based Process For Calculating Stiffness Matrices of Space Frame Elements With Axially Varying Cross SectionDocument9 pagesBoundary-Integral-Based Process For Calculating Stiffness Matrices of Space Frame Elements With Axially Varying Cross SectionTatiane MagaNo ratings yet
- Descriptive Geo NotesDocument12 pagesDescriptive Geo NotesAlven T BactadNo ratings yet
- CAD CAM ApplicationDocument57 pagesCAD CAM ApplicationSumanthNo ratings yet
- A Three-Dimensional Finite-Strain Rod Model. Part Ii: Computational AspectsDocument37 pagesA Three-Dimensional Finite-Strain Rod Model. Part Ii: Computational AspectsAmenNo ratings yet
- Access Structures For Angular Similarity Queries: Tan Apaydin and Hakan FerhatosmanogluDocument14 pagesAccess Structures For Angular Similarity Queries: Tan Apaydin and Hakan FerhatosmanogluRajeev VarmaNo ratings yet
- Research Article: Three-Dimensional CST Parameterization Method Applied in Aircraft Aeroelastic AnalysisDocument16 pagesResearch Article: Three-Dimensional CST Parameterization Method Applied in Aircraft Aeroelastic AnalysisSohail AhmedNo ratings yet
- 1 s2.0 S0045782522008040 MainDocument36 pages1 s2.0 S0045782522008040 MainkoulliredouaneNo ratings yet
- An Essay To Introduction of Differential Geometry and ApplicationsDocument17 pagesAn Essay To Introduction of Differential Geometry and ApplicationsAmir Mosavi0% (1)
- Designing and Fabricating Continuous ComDocument7 pagesDesigning and Fabricating Continuous Com董思辰No ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Including Geometric Feature Variations in Tolerance Analysis of Mechanical AssembliesDocument32 pagesIncluding Geometric Feature Variations in Tolerance Analysis of Mechanical AssembliessharanabkNo ratings yet
- 1992 - A Method For Registration of 3-D Shapes - ICP - OKDocument18 pages1992 - A Method For Registration of 3-D Shapes - ICP - OKluongxuandanNo ratings yet
- Force Directed Graph Drawing Algorithms: Naeem SajjadDocument6 pagesForce Directed Graph Drawing Algorithms: Naeem SajjadSajjad NaeemNo ratings yet
- Stiffness Metrics For Design of 3-RRR Flexible Manipulator: K.V.Varalakshmi, Dr.J.SrinivasDocument7 pagesStiffness Metrics For Design of 3-RRR Flexible Manipulator: K.V.Varalakshmi, Dr.J.SrinivasIJMERNo ratings yet
- Straus7 Meshing TutorialDocument90 pagesStraus7 Meshing Tutorialmat-l91100% (1)
- Unstructured Mesh Generation Including Directional Renement For Aerodynamic Flow SimulationDocument14 pagesUnstructured Mesh Generation Including Directional Renement For Aerodynamic Flow SimulationManu ChakkingalNo ratings yet
- DesignBuilder CFD DraftManualDocument41 pagesDesignBuilder CFD DraftManualalexjamessmith6342No ratings yet
- 8 An Overview of 3d Data Content File Formats and ViewersDocument21 pages8 An Overview of 3d Data Content File Formats and Viewersmdurna2000No ratings yet
- Landmark Transferencia Con El Gráfico MinimalDocument14 pagesLandmark Transferencia Con El Gráfico MinimalBen Mur MarNo ratings yet
- Designing With Parametric Sketches: What Is Parametric SketchingDocument8 pagesDesigning With Parametric Sketches: What Is Parametric Sketchingrizviabbas2010No ratings yet
- Milos Method - Cad Techniques Used To Obtain The Blade of Francis Turbine Runner - T. MilosDocument8 pagesMilos Method - Cad Techniques Used To Obtain The Blade of Francis Turbine Runner - T. MilosIndra DjodikusumoNo ratings yet
- Assembly ModelingDocument43 pagesAssembly Modelingwadlan0% (1)
- Research Papers: 3D Model Generation From The Engineering DrawingDocument8 pagesResearch Papers: 3D Model Generation From The Engineering Drawingcooljoy4meNo ratings yet
- Generating Variational Geometry of A Hole With Composite TolerancesDocument16 pagesGenerating Variational Geometry of A Hole With Composite TolerancesChetan GaonkarNo ratings yet
- 3D Gear Measurement by CMM: W. Otze' F. AertiDocument12 pages3D Gear Measurement by CMM: W. Otze' F. Aertikalvino314No ratings yet
- Bai - 2010 - Optimum Design of Spherical Parallel ManipulatorsDocument12 pagesBai - 2010 - Optimum Design of Spherical Parallel ManipulatorsDurgesh Haribhau SalunkheNo ratings yet
- CC 3Document11 pagesCC 3sumitNo ratings yet
- Cil01 526Document12 pagesCil01 526dmlsfmmNo ratings yet
- Straus7 Meshing TutorialDocument94 pagesStraus7 Meshing TutorialCameron MitchellNo ratings yet
- An Introduction To Standard and EnrichedDocument92 pagesAn Introduction To Standard and EnrichedJorge Luis Garcia ZuñigaNo ratings yet
- Research On Similarity Measurements of 3D Models Based On Skeleton TreesDocument24 pagesResearch On Similarity Measurements of 3D Models Based On Skeleton TreesAshutosh AshuNo ratings yet
- Best Fit Vert AlignmentDocument9 pagesBest Fit Vert AlignmentSuciu FlorinNo ratings yet
- Polygonal Approximation of Closed Curves Across Multiple ViewsDocument6 pagesPolygonal Approximation of Closed Curves Across Multiple ViewsRiaz UddinNo ratings yet
- Mat FoundationDocument11 pagesMat FoundationIngeniero Emmanuel RodriguezNo ratings yet
- 23 Denk 239 250Document12 pages23 Denk 239 250黃偉宸No ratings yet
- PRO - CAAD Futures - 1989 - Mitchell - Introduction - A New Agenda For Computer-Aided DesignDocument16 pagesPRO - CAAD Futures - 1989 - Mitchell - Introduction - A New Agenda For Computer-Aided DesignValeriaNo ratings yet
- Unit A8Document6 pagesUnit A8mstudy123456No ratings yet
- Geometric Modelling TechniquesDocument8 pagesGeometric Modelling TechniquesRaghuNo ratings yet
- Two Dimensional Computer Graphics: Exploring the Visual Realm: Two Dimensional Computer Graphics in Computer VisionFrom EverandTwo Dimensional Computer Graphics: Exploring the Visual Realm: Two Dimensional Computer Graphics in Computer VisionNo ratings yet
- Descriptive Geometry: Unlocking the Visual Realm: Exploring Descriptive Geometry in Computer VisionFrom EverandDescriptive Geometry: Unlocking the Visual Realm: Exploring Descriptive Geometry in Computer VisionNo ratings yet
- Image Based Modeling and Rendering: Exploring Visual Realism: Techniques in Computer VisionFrom EverandImage Based Modeling and Rendering: Exploring Visual Realism: Techniques in Computer VisionNo ratings yet
- Trifocal Tensor: Exploring Depth, Motion, and Structure in Computer VisionFrom EverandTrifocal Tensor: Exploring Depth, Motion, and Structure in Computer VisionNo ratings yet
- GWWDDocument3 pagesGWWDMayur MandrekarNo ratings yet
- 3.1. Schematic Explorer View Schematic Explorer: 3 Working With The Diagrams ApplicationDocument4 pages3.1. Schematic Explorer View Schematic Explorer: 3 Working With The Diagrams ApplicationMayur MandrekarNo ratings yet
- New SCGROUP: Schematic Group Rename Apply Dismiss: All Button Can Be UsedDocument3 pagesNew SCGROUP: Schematic Group Rename Apply Dismiss: All Button Can Be UsedMayur MandrekarNo ratings yet
- Savework / Getwork SaveworkDocument4 pagesSavework / Getwork SaveworkMayur MandrekarNo ratings yet
- XsxefcrDocument5 pagesXsxefcrMayur MandrekarNo ratings yet
- 2.6 Computer Aided Assembly of Rigid Bodies: P P Q Q P P QDocument4 pages2.6 Computer Aided Assembly of Rigid Bodies: P P Q Q P P QMayur MandrekarNo ratings yet
- Y FDN GD Kfy GD DN: K FD DDocument5 pagesY FDN GD Kfy GD DN: K FD DMayur MandrekarNo ratings yet
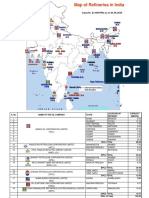
- RefineriesMap PDFDocument2 pagesRefineriesMap PDFMayur MandrekarNo ratings yet
- Gate Solved Paper - Me: X Aq Q y A Q Dy Q Q Q QDocument51 pagesGate Solved Paper - Me: X Aq Q y A Q Dy Q Q Q QMayur MandrekarNo ratings yet
- 00 PDFDocument2 pages00 PDFMayur MandrekarNo ratings yet
- Check Opc Types: V-111S Process VesselDocument1 pageCheck Opc Types: V-111S Process VesselMayur MandrekarNo ratings yet
- 01 PDFDocument2 pages01 PDFMayur MandrekarNo ratings yet
- New Doc 2017-07-27 - 1Document1 pageNew Doc 2017-07-27 - 1Mayur MandrekarNo ratings yet
- SACS FloatationDocument26 pagesSACS FloatationBolarinwaNo ratings yet
- 02 4ellipse 30-36Document3 pages02 4ellipse 30-36eamcetmaterials100% (1)
- Three Identical BallsDocument5 pagesThree Identical BallsharshanauocNo ratings yet
- GeolemmasDocument10 pagesGeolemmasddkillerNo ratings yet
- Catalog BlumDocument549 pagesCatalog BlumarhitectbobocNo ratings yet
- Coordinates: Distance Between Two PointsDocument7 pagesCoordinates: Distance Between Two PointsMuralee VeeramalaiNo ratings yet
- PHY 113 C General Physics I 11 AM-12:15 PM TR Olin 101 Plan For Lecture 3Document29 pagesPHY 113 C General Physics I 11 AM-12:15 PM TR Olin 101 Plan For Lecture 3Jagadish BabuNo ratings yet
- Review - Mathematics, Surveying and Transportation EngineeringDocument11 pagesReview - Mathematics, Surveying and Transportation EngineeringPaulyne TuganoNo ratings yet
- KinamaticsDocument10 pagesKinamaticsChathur ChandrasooryaNo ratings yet
- HyperbolaDocument3 pagesHyperbolaCadornaNo ratings yet
- Hoffman Kunze Linear Algebra Chapter 3 5 3 7 SolutionsDocument7 pagesHoffman Kunze Linear Algebra Chapter 3 5 3 7 SolutionsSuyash DateNo ratings yet
- Implicit Differentiation Worksheet 1Document4 pagesImplicit Differentiation Worksheet 1linlinycNo ratings yet
- BHS Math Summer Bridge-Gap PacketDocument28 pagesBHS Math Summer Bridge-Gap PacketTomas Pua Sr IS-SecondaryNo ratings yet
- Butterfly TrigonometryDocument4 pagesButterfly Trigonometryneiljain421No ratings yet
- PROBLEM 7-20: MACHINE DESIGN - An Integrated Approach, 4th Ed. 7-20-1Document2 pagesPROBLEM 7-20: MACHINE DESIGN - An Integrated Approach, 4th Ed. 7-20-1Diana Alejandra Bermudez FajardoNo ratings yet
- Graded RingsDocument21 pagesGraded RingsRahul Sharma100% (1)
- Parallel Lines Worksheet2019-20Document2 pagesParallel Lines Worksheet2019-20deepakNo ratings yet
- Drafting - Technology and Livelihood EducationDocument18 pagesDrafting - Technology and Livelihood EducationNix Roberts100% (6)
- N.kuliah Cover DMB 1243Document4 pagesN.kuliah Cover DMB 1243ganNo ratings yet
- Edu Cat en v5s FF v5r18 ToprintDocument508 pagesEdu Cat en v5s FF v5r18 ToprintAman LikeyouNo ratings yet
- Motion in A PlaneDocument37 pagesMotion in A PlaneAnoop PsNo ratings yet
- Franconeri ExperCeptionDotNet DataVisQuickRefDocument1 pageFranconeri ExperCeptionDotNet DataVisQuickRefDinh TranNo ratings yet
- Basics of MechanicsDocument132 pagesBasics of MechanicsSuresh KumarNo ratings yet
- Zimbabwe School Examinations Council Pure Mathematics 6042/2Document8 pagesZimbabwe School Examinations Council Pure Mathematics 6042/2Evans Mbizo Nyathi100% (1)
- Problemas Pablo SoberónDocument2 pagesProblemas Pablo SoberónJosé LuisNo ratings yet
- Levi Civita Etc PDFDocument6 pagesLevi Civita Etc PDFAmalendu PramanickNo ratings yet
- Trigonometry DraftDocument25 pagesTrigonometry Draftgeoffkent77No ratings yet
- The Way Beyond ArtDocument154 pagesThe Way Beyond Artaahhww100% (1)