Download as pdf or txt
You might also like
- Feedback Control Systems by S C Goyal U A Bakshi PDFDocument2 pagesFeedback Control Systems by S C Goyal U A Bakshi PDFHeather29% (7)
- Laboratory Exercise No. 6 Poles and Zeros of A Transfer FunctionDocument10 pagesLaboratory Exercise No. 6 Poles and Zeros of A Transfer FunctionYasmin KayeNo ratings yet
- Sanchez 07 Poles and Zeros of Transfer FunctionsDocument20 pagesSanchez 07 Poles and Zeros of Transfer FunctionsYasmin KayeNo ratings yet
- Poles and Zeros of Transfer FunctionDocument34 pagesPoles and Zeros of Transfer FunctionRyan VasquezNo ratings yet
- 07 Poles and Zeros of Transfer FunctionDocument33 pages07 Poles and Zeros of Transfer FunctionRyan VasquezNo ratings yet
- Lecture - 2 - Digital Control SystemDocument77 pagesLecture - 2 - Digital Control Systemtadepeace23No ratings yet
- Pole-Zero-Gain Filters: Chapter InsightDocument13 pagesPole-Zero-Gain Filters: Chapter InsightAldon JimenezNo ratings yet
- Chap 2 1 Modeling in Freq 1Document48 pagesChap 2 1 Modeling in Freq 1Furkan DedeNo ratings yet
- Control Manual Lab 10Document14 pagesControl Manual Lab 10Hussain HadiNo ratings yet
- LN2 (Electrical Systems)Document38 pagesLN2 (Electrical Systems)Deniz DemirNo ratings yet
- Machine Control SystemsDocument9 pagesMachine Control SystemsHisham SyedNo ratings yet
- Week 2Document45 pagesWeek 2salim ucarNo ratings yet
- Transfer Function Zero Pole GainDocument12 pagesTransfer Function Zero Pole GainAreez KhanNo ratings yet
- CS Mod4@AzDOCUMENTS - inDocument21 pagesCS Mod4@AzDOCUMENTS - insssNo ratings yet
- FCS Lab2Document36 pagesFCS Lab2muhammadNo ratings yet
- EEE 3201: Control System I: Week 2: Lecture 1Document11 pagesEEE 3201: Control System I: Week 2: Lecture 1harun or rashidNo ratings yet
- Unit 6 - Dynamic Behaviour of Higher Order System Part 2 Edited.....Document44 pagesUnit 6 - Dynamic Behaviour of Higher Order System Part 2 Edited.....rafitara78No ratings yet
- Lecture 4 - 5Document78 pagesLecture 4 - 5rachit guptaNo ratings yet
- Complete Root LocusDocument15 pagesComplete Root LocusZagrebas EightpackNo ratings yet
- Topic:-Root Locus: Muhammad Usman L2f08bsee0674 M Tariq Waseem L2f08bsee0715Document13 pagesTopic:-Root Locus: Muhammad Usman L2f08bsee0674 M Tariq Waseem L2f08bsee0715xenium9363No ratings yet
- Root LocusDocument26 pagesRoot LocusMuhammad Tariq SadiqNo ratings yet
- Mece306 ch04 2019 20Document70 pagesMece306 ch04 2019 20Eren ÖzataNo ratings yet
- Control Systems-Lab Manual 11newDocument4 pagesControl Systems-Lab Manual 11newmanni1220122No ratings yet
- AlganDocument4 pagesAlganoccydppNo ratings yet
- NMB34203 - ch2 - Mathematical ModelDocument47 pagesNMB34203 - ch2 - Mathematical ModelfatinNo ratings yet
- Chapter 2Document59 pagesChapter 2Saksopheaktra PhoNo ratings yet
- Derivation of Root Locus Rules: ExamplesDocument20 pagesDerivation of Root Locus Rules: ExamplesBuvanesh Buvi VnrNo ratings yet
- Fourier Sampling & Simon's Algorithm: 4.1 Reversible ComputationDocument11 pagesFourier Sampling & Simon's Algorithm: 4.1 Reversible Computationtoto_bogdanNo ratings yet
- An Efficient Nonlinear Shift-Invariant Transformation - PsDocument8 pagesAn Efficient Nonlinear Shift-Invariant Transformation - PsΟλυμπίδης ΙωάννηςNo ratings yet
- 16-Splines and Piecewise InterpolationDocument17 pages16-Splines and Piecewise InterpolationkennethmsorianoNo ratings yet
- 4-Transfer Function and Modeling of Mechanical SystemDocument35 pages4-Transfer Function and Modeling of Mechanical SystemUsama KaleemNo ratings yet
- Activity 3: Modeling in The Frequency Domain: 1 Laplace Transform ReviewDocument17 pagesActivity 3: Modeling in The Frequency Domain: 1 Laplace Transform ReviewClinth JhonNo ratings yet
- M3001 Cheat SheetDocument4 pagesM3001 Cheat SheetVincent KohNo ratings yet
- Louise Lope Adonis Pabillaran - Activity 3Document11 pagesLouise Lope Adonis Pabillaran - Activity 3Louise Lope PabillaranNo ratings yet
- Root Locus TechniqueDocument43 pagesRoot Locus TechniqueAzeem SarwarNo ratings yet
- Articulo ControlDocument1 pageArticulo Controlbrian barretusNo ratings yet
- Space Simulation Lab ManualDocument55 pagesSpace Simulation Lab ManualBhanuNo ratings yet
- Root Locus: DesignDocument22 pagesRoot Locus: DesignkaanNo ratings yet
- Network Synthesis ModifiedDocument109 pagesNetwork Synthesis ModifiedPranzal SharmaNo ratings yet
- Week 2 - L2 - Review of Laplace TransformDocument39 pagesWeek 2 - L2 - Review of Laplace TransformOlerile AnaniaNo ratings yet
- Parameter For Dynalnic System Performance: "Ari TionDocument8 pagesParameter For Dynalnic System Performance: "Ari TionPriyanshu KumawatNo ratings yet
- Funda of Multivariable ControlDocument69 pagesFunda of Multivariable Controlኪዳንኪ ማርያም ዘኢየሀልቅNo ratings yet
- Lab3 Long ReportDocument21 pagesLab3 Long Reportalif fudenNo ratings yet
- LAB No. 10 Analysis of Linear Control System Using Root Loci TechniqueDocument7 pagesLAB No. 10 Analysis of Linear Control System Using Root Loci TechniqueSanjar BeyNo ratings yet
- W3a PDFDocument26 pagesW3a PDFShujah RashidNo ratings yet
- Control Systems - Root LocusDocument10 pagesControl Systems - Root LocussajedaliNo ratings yet
- Chapter 2 (Print)Document14 pagesChapter 2 (Print)666aokiNo ratings yet
- Report On Nonlinear DynamicsDocument24 pagesReport On Nonlinear DynamicsViraj NadkarniNo ratings yet
- Root Locus MethodDocument23 pagesRoot Locus MethodChanoxismNo ratings yet
- Feedback and Control SystemDocument7 pagesFeedback and Control SystemMax Sedric L LaylayNo ratings yet
- Fourth Class Process ControlDocument3 pagesFourth Class Process ControlmarwanNo ratings yet
- Movement of Poles-1Document6 pagesMovement of Poles-1Shahid FareedNo ratings yet
- Chapter 6 - Time - Response - 2020 PDFDocument88 pagesChapter 6 - Time - Response - 2020 PDFtiraNo ratings yet
- EECE202 in Class Assignment II EssayDocument4 pagesEECE202 in Class Assignment II EssayAhmad Al-ShormanNo ratings yet
- Week 1B - Online Classes - S2020Document25 pagesWeek 1B - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- PSA Lab 5 ReportDocument8 pagesPSA Lab 5 ReportMovie Trailers blazeNo ratings yet
- 2.3 Linear Approximation of Physical SystemsDocument3 pages2.3 Linear Approximation of Physical SystemsramNo ratings yet
- What Is Electronic Structure Theory?Document11 pagesWhat Is Electronic Structure Theory?Vijay PradhanNo ratings yet
- Prestige Institute of Engineering & Science Indore (M.P.)Document3 pagesPrestige Institute of Engineering & Science Indore (M.P.)SagarManjrekarNo ratings yet
- Control System Synthesis by Root Locus MethodDocument6 pagesControl System Synthesis by Root Locus MethodcastrojpNo ratings yet
- Process 3: Production of Polyethylene Terephthalate Via Esterification of Therephthalic Acid From Liquid-Phase Catalyzed Oxidation of TolueneDocument2 pagesProcess 3: Production of Polyethylene Terephthalate Via Esterification of Therephthalic Acid From Liquid-Phase Catalyzed Oxidation of TolueneYasmin KayeNo ratings yet
- Technological Instute of The Philippines Chemical Engineering Department Practicum Class of 2021Document2 pagesTechnological Instute of The Philippines Chemical Engineering Department Practicum Class of 2021Yasmin KayeNo ratings yet
- Seatwork Sepa Graph Number 3Document3 pagesSeatwork Sepa Graph Number 3Yasmin KayeNo ratings yet
- Reaction Kinetics Studies in A Batch Reactor: NtroductionDocument15 pagesReaction Kinetics Studies in A Batch Reactor: NtroductionYasmin KayeNo ratings yet
- Quice Review Inc.: LeachingDocument12 pagesQuice Review Inc.: LeachingYasmin KayeNo ratings yet
- Raw Material SpecificationsDocument20 pagesRaw Material SpecificationsYasmin KayeNo ratings yet
- Applied Sciences: A Method For Ferulic Acid Production From Rice Bran Oil Soapstock Using A Homogenous SystemDocument10 pagesApplied Sciences: A Method For Ferulic Acid Production From Rice Bran Oil Soapstock Using A Homogenous SystemYasmin KayeNo ratings yet
- Drying Applications: CHE 408: Heat and Mass TransferDocument15 pagesDrying Applications: CHE 408: Heat and Mass TransferYasmin KayeNo ratings yet
- Hi, Future Engineer! Please Cut Me Based On Your Preference!Document4 pagesHi, Future Engineer! Please Cut Me Based On Your Preference!Yasmin KayeNo ratings yet
- CPD 3334Document131 pagesCPD 3334Yasmin KayeNo ratings yet
- Milestone 3 - Task 1Document1 pageMilestone 3 - Task 1Yasmin KayeNo ratings yet
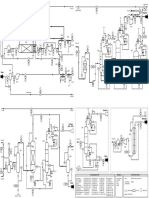
- Ethylene: Designers Process Equipment List Process Flow SchemeDocument1 pageEthylene: Designers Process Equipment List Process Flow SchemeYasmin KayeNo ratings yet
- Pitch DeckDocument29 pagesPitch DeckYasmin KayeNo ratings yet
- A. What Are The 5 Levels of Ecology?Document3 pagesA. What Are The 5 Levels of Ecology?Yasmin KayeNo ratings yet
- Thesis It! The Novel Guide For Working On Your Research Paper March 2, 2021 Google Meet (Webinar) ReflectionDocument1 pageThesis It! The Novel Guide For Working On Your Research Paper March 2, 2021 Google Meet (Webinar) ReflectionYasmin KayeNo ratings yet
- Control-Relevant Modeling in Drug Delivery: Robert S. Parker, Francis J. Doyle IIIDocument18 pagesControl-Relevant Modeling in Drug Delivery: Robert S. Parker, Francis J. Doyle IIIBrasoveanu GheorghitaNo ratings yet
- Robust Model Predictive Control ThesisDocument4 pagesRobust Model Predictive Control Thesisafhbgohob100% (2)
- A Nonlinear Approach For Re-Entry Guidance of Reusable Launch Vehicles Using Model Predictive Static ProgrammingDocument6 pagesA Nonlinear Approach For Re-Entry Guidance of Reusable Launch Vehicles Using Model Predictive Static ProgrammingOsman MohammedNo ratings yet
- Re30035 2011-12 WebDocument28 pagesRe30035 2011-12 Webmmaldonado10No ratings yet
- Mechatronic Simulations With NX Motion and Matlab /simulink: White PaperDocument17 pagesMechatronic Simulations With NX Motion and Matlab /simulink: White Paperkfathi55No ratings yet
- Yokogawa Centum CS3000Document43 pagesYokogawa Centum CS3000Hammad AshrafNo ratings yet
- Boiler Control For Fossil-Fired Utility BoilersDocument6 pagesBoiler Control For Fossil-Fired Utility BoilersJames IzquierdoNo ratings yet
- Process Design and Control: Course Code Monday & FridayDocument37 pagesProcess Design and Control: Course Code Monday & FridayElia SaadNo ratings yet
- Tutorial-SOLUTIONS-Feedback Control Systems March2017Document13 pagesTutorial-SOLUTIONS-Feedback Control Systems March2017omairakhtar12345No ratings yet
- cs2403-DIGITAL SIGNAL PROCESSING PDFDocument0 pagescs2403-DIGITAL SIGNAL PROCESSING PDFvelkarthi92No ratings yet
- Electrical and Electronics Engineering S7 & S8Document362 pagesElectrical and Electronics Engineering S7 & S8Ajith SajiNo ratings yet
- 2016 03 18 Training - Digital GovernorDocument28 pages2016 03 18 Training - Digital GovernorlufimanNo ratings yet
- Combining The Benefits of Function Approximation and Trajectory OptimizationDocument8 pagesCombining The Benefits of Function Approximation and Trajectory OptimizationCradleNo ratings yet
- Control QuestionsDocument6 pagesControl Questionshksaifee0% (1)
- Operation Manual: Series P40-000Document53 pagesOperation Manual: Series P40-000Hai Thuong VuNo ratings yet
- 18BM44 - 2022Document3 pages18BM44 - 2022Lakshmi PriyaNo ratings yet
- Ecu Toyota Corolla Modelo Nuevo 1Document13 pagesEcu Toyota Corolla Modelo Nuevo 1MauricioDiniz100% (1)
- Finite Impulse Response (FIR) FiltersDocument39 pagesFinite Impulse Response (FIR) Filtersvinodkumbhar2012No ratings yet
- Mathematical Modeling Simulation and Control of Ball and Beam SystemDocument5 pagesMathematical Modeling Simulation and Control of Ball and Beam SystemCamilo Andrés BeltránNo ratings yet
- Jitter Ring Osc Mcneill JSSC 1997Document10 pagesJitter Ring Osc Mcneill JSSC 1997SampoornaGonellaNo ratings yet
- Profisafe Su G120CDocument30 pagesProfisafe Su G120CRice CiprianiNo ratings yet
- Main PDFDocument143 pagesMain PDFmohmmad mahmoodNo ratings yet
- Brochure Master GEEDocument2 pagesBrochure Master GEEvenvettyNo ratings yet
- Quadratic Programming Solution of Dynamic Matrix Control (QDMC)Document16 pagesQuadratic Programming Solution of Dynamic Matrix Control (QDMC)pusikurac1234567No ratings yet
- Principles of Guidance, Navigation and Control of UavsDocument30 pagesPrinciples of Guidance, Navigation and Control of Uavspervaiz KhalidNo ratings yet
- Control System I Practical Iv Semester, B.Tech Ee Course Code: Eec273Document5 pagesControl System I Practical Iv Semester, B.Tech Ee Course Code: Eec273JomeNo ratings yet
- DSP QP Ec EeeDocument7 pagesDSP QP Ec EeePranjal GaurNo ratings yet
- Week 12 Controller Design Feedback and Feedforward TutorialDocument3 pagesWeek 12 Controller Design Feedback and Feedforward TutorialHanguk Germerio ShinNo ratings yet
- Ws Sinamics Gl150 enDocument16 pagesWs Sinamics Gl150 ensykimk8921No ratings yet