You might also like
- Power Plant PW 1100gDocument366 pagesPower Plant PW 1100gjustin rejith r95% (19)
- DLE Overview PDFDocument53 pagesDLE Overview PDFMijail David Felix Narvaez83% (6)
- SullairTS20 de 100 A 250HP Ingles 02250059-860Document130 pagesSullairTS20 de 100 A 250HP Ingles 02250059-860ingenieria_377024831100% (1)
- 1C 130H 4 27 1 Flight ControlsDocument262 pages1C 130H 4 27 1 Flight ControlsMohamed Hassan100% (1)
- The Technical, Aerodynamic & Performance Aspects of a Helicopter: A Manual for Helicopter Pilots and Engineers Who Want to Know MoreFrom EverandThe Technical, Aerodynamic & Performance Aspects of a Helicopter: A Manual for Helicopter Pilots and Engineers Who Want to Know MoreRating: 3 out of 5 stars3/5 (2)
- Sullair Industrial Air Compressor TS-20 V200TSDocument64 pagesSullair Industrial Air Compressor TS-20 V200TScolinatorNo ratings yet
- 70 Power Plant (V2500-A5) PDFDocument292 pages70 Power Plant (V2500-A5) PDFNguyen Trung100% (1)
- Physical Education Lesson Plan-2Document3 pagesPhysical Education Lesson Plan-2api-459799295No ratings yet
- Grady McMurtry The Millenial Glow Myth and Magic in The Marxist Ethics V 1.0.5 PDFDocument130 pagesGrady McMurtry The Millenial Glow Myth and Magic in The Marxist Ethics V 1.0.5 PDFMoreno KrvavacNo ratings yet
- United States Patent (19) : 11 Patent Number: 5,755,291 45) Date of Patent: May 26, 1998Document21 pagesUnited States Patent (19) : 11 Patent Number: 5,755,291 45) Date of Patent: May 26, 1998Justus VenterNo ratings yet
- United States Patent (19) : 11 Patent Number: 45) Date of Patent: Jan. 7, 1997Document9 pagesUnited States Patent (19) : 11 Patent Number: 45) Date of Patent: Jan. 7, 1997Kaustubh PanchalNo ratings yet
- IIII: United States Patent (19) 11 Patent Number: 5,513,519Document12 pagesIIII: United States Patent (19) 11 Patent Number: 5,513,519Somplak KudaNo ratings yet
- Rb211 Fan Blade Failure Tr200200646 - 001Document22 pagesRb211 Fan Blade Failure Tr200200646 - 001EstevamNo ratings yet
- United States Patent (19) : Silva, JRDocument12 pagesUnited States Patent (19) : Silva, JRnooraaNo ratings yet
- 2011 - Us7954558 - Devices and Methods For Power Control in Horizontal Directional DrillingDocument13 pages2011 - Us7954558 - Devices and Methods For Power Control in Horizontal Directional DrillingCường Nguyễn QuốcNo ratings yet
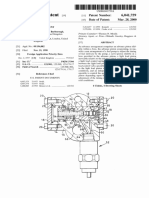
- 105 For BP Gauge: (12) United States Patent (10) Patent No.: US 8.406,941 B2Document11 pages105 For BP Gauge: (12) United States Patent (10) Patent No.: US 8.406,941 B2BoredNo ratings yet
- Decoder EncoderDocument8 pagesDecoder EncoderEmer nelsonNo ratings yet
- United States Patent (10) Patent No.: US 6,341,271 B1: Heather Ann Relyea, Niskayuna Wo 135, 40 or GO6F/17/60Document15 pagesUnited States Patent (10) Patent No.: US 6,341,271 B1: Heather Ann Relyea, Niskayuna Wo 135, 40 or GO6F/17/60Syed IzzatNo ratings yet
- United States Patent (10) Patent No.: US 6,324,393 B1: Doshay (45) Date of Patent: Nov. 27, 2001Document5 pagesUnited States Patent (10) Patent No.: US 6,324,393 B1: Doshay (45) Date of Patent: Nov. 27, 2001Kalai KalaiNo ratings yet
- United States Patent (19) 11 Patent Number: 5,265,567: Nudds Et Al. (45) Date of Patent: Nov. 30, 1993Document8 pagesUnited States Patent (19) 11 Patent Number: 5,265,567: Nudds Et Al. (45) Date of Patent: Nov. 30, 1993Bala RajuNo ratings yet
- Us6230368 PDFDocument9 pagesUs6230368 PDFSantoshNo ratings yet
- Auto Back TackDocument14 pagesAuto Back TackRicardo PirelaNo ratings yet
- United States Patent: Gaydos Et AlDocument8 pagesUnited States Patent: Gaydos Et AlHugo Mauricio Echeverry HerreraNo ratings yet
- Perkin-Elmer M83-Series. Model 8-32 Processor. Customer Installation Manual (29-526R02) May 1978Document26 pagesPerkin-Elmer M83-Series. Model 8-32 Processor. Customer Installation Manual (29-526R02) May 1978Lenina Viktoriya TeknyetovaNo ratings yet
- Differential Bucket Control System For Waterjet BoatsDocument19 pagesDifferential Bucket Control System For Waterjet Boatsthinh.nguyen87780No ratings yet
- Ulllted States Patent (19) (11) Patent Number: 6,005,308: Bryde Et Al. (45) Date of Patent: Dec. 21, 1999Document10 pagesUlllted States Patent (19) (11) Patent Number: 6,005,308: Bryde Et Al. (45) Date of Patent: Dec. 21, 1999FendiNo ratings yet
- Electronic Ignition SystemDocument9 pagesElectronic Ignition SystemozguryilmazmailiNo ratings yet
- Us 5827149Document8 pagesUs 5827149electronarutoNo ratings yet
- GruasDocument79 pagesGruasMartin Israel Cordero CastilloNo ratings yet
- United States Patent (19) : 11 Patent Number: 45) Date of PatentDocument10 pagesUnited States Patent (19) : 11 Patent Number: 45) Date of PatentAndi KaNo ratings yet
- US5455474Document16 pagesUS5455474naturist_medNo ratings yet
- Sample1Document6 pagesSample1coNo ratings yet
- US4514771Document9 pagesUS4514771LpicNo ratings yet
- Overcurrent Protection Circuit Utilizing Peak Detection Circuit With Variable Dynamic ResponseDocument9 pagesOvercurrent Protection Circuit Utilizing Peak Detection Circuit With Variable Dynamic Response周朝灵No ratings yet
- Us5646350 SSTDocument12 pagesUs5646350 SSTsebastianNo ratings yet
- United States Patent (19) 11 Patent Number: 5,928,426: Aitchison (45) Date of Patent: Jul. 27, 1999Document17 pagesUnited States Patent (19) 11 Patent Number: 5,928,426: Aitchison (45) Date of Patent: Jul. 27, 1999hosseinNo ratings yet
- Windproof Umbrella Having An Improved Rib Linkage SystemDocument9 pagesWindproof Umbrella Having An Improved Rib Linkage SystemAyoub El kadaouiNo ratings yet
- Servomotores DCDocument20 pagesServomotores DCarmando luis rois peñarandaNo ratings yet
- Patente Carter Jump Take Off Autogyro Control System For Rotor Aircraft 2002 Us5727754Document13 pagesPatente Carter Jump Take Off Autogyro Control System For Rotor Aircraft 2002 Us5727754Mariela TisseraNo ratings yet
- Us 5494229Document18 pagesUs 5494229gabi chisNo ratings yet
- United States Patent (19) 11 Patent Number: 6,111,492: Fink (45) Date of Patent: Aug. 29, 2000Document8 pagesUnited States Patent (19) 11 Patent Number: 6,111,492: Fink (45) Date of Patent: Aug. 29, 2000ahmadNo ratings yet
- United States Patent 19 11 Patent Number: 5,726,911: Canada Et Al. 45 Date of Patent: Mar. 10, 1998Document14 pagesUnited States Patent 19 11 Patent Number: 5,726,911: Canada Et Al. 45 Date of Patent: Mar. 10, 1998sebastianNo ratings yet
- United States Patent: (12) (10) Patent N0.: US 6,868,357 B2Document27 pagesUnited States Patent: (12) (10) Patent N0.: US 6,868,357 B2Bruno Paim TargaNo ratings yet
- Pipe Layer With Side BoomDocument14 pagesPipe Layer With Side BoomAndré Meirelles100% (1)
- Meccanismo T.R.Document6 pagesMeccanismo T.R.Marco Raneo PezzanoNo ratings yet
- Ata 71 A 80 Power Plant Iaev 2500Document310 pagesAta 71 A 80 Power Plant Iaev 2500juanNo ratings yet
- (12 Ulllted States Patent (10) Patent N0.: US 6,360,830 B1Document53 pages(12 Ulllted States Patent (10) Patent N0.: US 6,360,830 B1Cường Nguyễn QuốcNo ratings yet
- TG 1 - Sistema de Limpeza Do Condensador - Manual de InstalaçãoDocument340 pagesTG 1 - Sistema de Limpeza Do Condensador - Manual de InstalaçãoCarlos Eduardo Andrade LimaNo ratings yet
- Ape Vibro 100 240&260 0801Document100 pagesApe Vibro 100 240&260 0801Mohamed ElsagerNo ratings yet
- Us6041759 PDFDocument8 pagesUs6041759 PDFscaniaNo ratings yet
- US5305721Rotary Wankel Type EngineDocument10 pagesUS5305721Rotary Wankel Type Engine임학진No ratings yet
- Wind Turbine Brake Fayette US4715782Document9 pagesWind Turbine Brake Fayette US4715782Mariela TisseraNo ratings yet
- Us 7409794Document13 pagesUs 7409794bgm7966No ratings yet
- United States Patent (10) Patent No.: US 8,027.264 B2Document11 pagesUnited States Patent (10) Patent No.: US 8,027.264 B2feyn987No ratings yet
- Transmission Inertia Brake WithDocument10 pagesTransmission Inertia Brake Witholduren53100% (1)
- Hhhhhhhhhhhiiii: United States PatentDocument11 pagesHhhhhhhhhhhiiii: United States PatentzicxyNo ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument20 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentzhenyupanNo ratings yet
- United States Patent (9.: Fiorenza, IIDocument6 pagesUnited States Patent (9.: Fiorenza, IIYueming SangNo ratings yet
- A320321 Ata70 b1 VaecoDocument292 pagesA320321 Ata70 b1 VaecoVõ Đan TùngNo ratings yet
- Sullair 1600RH User ManualDocument96 pagesSullair 1600RH User ManualAbdul KhaliqNo ratings yet
- Us 4432328Document6 pagesUs 4432328Kristee Ann KellyNo ratings yet
- Unit Structure For Hazard SwitchDocument15 pagesUnit Structure For Hazard SwitchKawaljeet SinghNo ratings yet
- ABB Explosive Atmosphere 6Document1 pageABB Explosive Atmosphere 6Dhrubajyoti BoraNo ratings yet
- Features and Benefits: Odyssey Lowers Installation CostsDocument1 pageFeatures and Benefits: Odyssey Lowers Installation CostsDhrubajyoti BoraNo ratings yet
- Features and Benefits: Condensing Units Options Air Handlers Offer More FlexibilityDocument1 pageFeatures and Benefits: Condensing Units Options Air Handlers Offer More FlexibilityDhrubajyoti BoraNo ratings yet
- Radiator Code Quotation - IEADocument1 pageRadiator Code Quotation - IEADhrubajyoti BoraNo ratings yet
- Wolf Safety Lamp Company - Atex Explained Leaflet Issue March 2018Document1 pageWolf Safety Lamp Company - Atex Explained Leaflet Issue March 2018Dhrubajyoti BoraNo ratings yet
- Microsoft Excel - Forcing Input To Uppercase (Automatic)Document1 pageMicrosoft Excel - Forcing Input To Uppercase (Automatic)Dhrubajyoti BoraNo ratings yet
- US8904716Document79 pagesUS8904716Dhrubajyoti BoraNo ratings yet
- Cat Electronic Technician 2018A v1.0 Configuration: Parameter ValueDocument3 pagesCat Electronic Technician 2018A v1.0 Configuration: Parameter ValueDhrubajyoti BoraNo ratings yet
- United States Patent: (10) Patent No .: US 9, 988, 807 B2Document61 pagesUnited States Patent: (10) Patent No .: US 9, 988, 807 B2Dhrubajyoti BoraNo ratings yet
- 71584B SymptomsDocument26 pages71584B SymptomsDhrubajyoti BoraNo ratings yet
- Rig#807, RAMS Equipment List (03.mar.2021)Document25 pagesRig#807, RAMS Equipment List (03.mar.2021)Dhrubajyoti BoraNo ratings yet
- United States Patent (10) Patent No.: US 9,677.298 B2: Konduc Et Al. (45) Date of Patent: Jun. 13, 2017Document35 pagesUnited States Patent (10) Patent No.: US 9,677.298 B2: Konduc Et Al. (45) Date of Patent: Jun. 13, 2017Dhrubajyoti BoraNo ratings yet
- United States Patent (10) Patent No.: US 8.468,753 B2Document29 pagesUnited States Patent (10) Patent No.: US 8.468,753 B2Dhrubajyoti BoraNo ratings yet
- 1334075Document2 pages1334075Dhrubajyoti BoraNo ratings yet
- Sai Gó: (5) (5) (5) (Sics211Document33 pagesSai Gó: (5) (5) (5) (Sics211Dhrubajyoti BoraNo ratings yet
- Rig#806, RAMS Equipment Spec (03.mar.2021)Document53 pagesRig#806, RAMS Equipment Spec (03.mar.2021)Dhrubajyoti BoraNo ratings yet
- Lde00271 PSRPT 2018-04-20 08.08.10 PDFDocument5 pagesLde00271 PSRPT 2018-04-20 08.08.10 PDFDhrubajyoti BoraNo ratings yet
- Caterpillar Electronic Technician 2010A v1.0 6/1/2018 7:18 PMDocument5 pagesCaterpillar Electronic Technician 2010A v1.0 6/1/2018 7:18 PMDhrubajyoti BoraNo ratings yet
- Cat Electronic Technician 2018A v1.0 Status: Parameter ValueDocument2 pagesCat Electronic Technician 2018A v1.0 Status: Parameter ValueDhrubajyoti BoraNo ratings yet
- Cat Electronic Technician 2018A v1.0 Status: Parameter ValueDocument2 pagesCat Electronic Technician 2018A v1.0 Status: Parameter ValueDhrubajyoti BoraNo ratings yet
- Agdr 71CDocument3 pagesAgdr 71CDhrubajyoti BoraNo ratings yet
- Marathon Electric Nameplate InformationDocument2 pagesMarathon Electric Nameplate InformationDhrubajyoti BoraNo ratings yet
- Model: GFW-100 T5Document15 pagesModel: GFW-100 T5Dhrubajyoti Bora100% (1)
- Guide de Puissance 2016 Genelec PDFDocument64 pagesGuide de Puissance 2016 Genelec PDFDhrubajyoti Bora100% (1)
- Final ExamDocument3 pagesFinal ExamFaidah PangandamanNo ratings yet
- Test Bank For Quantitative Analysis For Management, 12th EditionDocument12 pagesTest Bank For Quantitative Analysis For Management, 12th Editionnurfhatihah50% (6)
- Miciano Vs BrimoDocument2 pagesMiciano Vs BrimoElla Marie Sanico-AbustanNo ratings yet
- Navigate A1 WB Answer KeyDocument12 pagesNavigate A1 WB Answer KeyFirenze CalzadosymasNo ratings yet
- Kariuki, Alex K - Impact of Information Technology On Organizational Performance Case of Population Services KenyaDocument52 pagesKariuki, Alex K - Impact of Information Technology On Organizational Performance Case of Population Services KenyaJack JaviNo ratings yet
- Alfafara V Acebedo Optical CompanyDocument1 pageAlfafara V Acebedo Optical CompanyMaria Cristina MartinezNo ratings yet
- Parliament Denies Amidu's AllegationsDocument3 pagesParliament Denies Amidu's Allegationsmyjoyonline.comNo ratings yet
- Linguistic Decolonization in Ngugi Wa Thiong'o's Decolonizing The MindDocument4 pagesLinguistic Decolonization in Ngugi Wa Thiong'o's Decolonizing The MindAsian Journal of Basic Science & ResearchNo ratings yet
- CHEMFISH Fluorinated CompoundsDocument11 pagesCHEMFISH Fluorinated Compoundssunny StevenNo ratings yet
- LEARNING ACTIVITY SHEET-CHEM 1 q1 Week 1 StudentDocument6 pagesLEARNING ACTIVITY SHEET-CHEM 1 q1 Week 1 StudentJhude JosephNo ratings yet
- Car Sales Cover LetterDocument8 pagesCar Sales Cover Letterf5de9mre100% (2)
- RPMS Editable TemplateDocument88 pagesRPMS Editable Templateflorida bambicoNo ratings yet
- Medical Importance of CulicoidesDocument15 pagesMedical Importance of Culicoidesadira64100% (1)
- Dieci Pegasus 40 25 Spare Parts Catalog Axl0057Document22 pagesDieci Pegasus 40 25 Spare Parts Catalog Axl0057guqupil100% (55)
- Reactor Clarifier Brochure 0619Document8 pagesReactor Clarifier Brochure 0619ABDUL MUZAMMILNo ratings yet
- 경북대학교 2004 영어Document6 pages경북대학교 2004 영어ifonly0070No ratings yet
- Chapter 5Document36 pagesChapter 5nsominvz345No ratings yet
- SurvivalPhrases Arabic S1L03Document2 pagesSurvivalPhrases Arabic S1L03JohannCoxNo ratings yet
- Standard Precautions Knowledge and Practice Among Radiographers in Sri LankaDocument8 pagesStandard Precautions Knowledge and Practice Among Radiographers in Sri LankaSachin ParamashettiNo ratings yet
- Tauck Australia Expands: WeeklyDocument3 pagesTauck Australia Expands: WeeklycruiseweeklyNo ratings yet
- Surgical Technique: Available in Titanium and Stainless SteelDocument53 pagesSurgical Technique: Available in Titanium and Stainless SteelJorge Trinidad de la CruzNo ratings yet
- A Term Paper On Justice Holmes'S Concept of Law: Adjunct Faculty Mr. Dev Mahat Nepal Law CampusDocument4 pagesA Term Paper On Justice Holmes'S Concept of Law: Adjunct Faculty Mr. Dev Mahat Nepal Law Campusrahul jhaNo ratings yet
- Proba Orala1Document5 pagesProba Orala1andreiNo ratings yet
- K-Factor Rated Transformer For Deal With Harmonic Generating LoadsDocument4 pagesK-Factor Rated Transformer For Deal With Harmonic Generating Loadsp41005679No ratings yet
- Nep Schools - VZM Dist - 26072021Document27 pagesNep Schools - VZM Dist - 26072021WHO IS ITNo ratings yet
- Issues and Challenges Implementation of Basic Education and VocationalDocument10 pagesIssues and Challenges Implementation of Basic Education and VocationalfaridahmarianiNo ratings yet
- s3 Rooted GuideDocument14 pagess3 Rooted GuideRyn HtNo ratings yet
- TracebackDocument3 pagesTracebackCristi LazărNo ratings yet