
Surveying
Surveying
You might also like
- Paper Trade TJS Elite v8.9.2 - S-O REVISEDDocument1,170 pagesPaper Trade TJS Elite v8.9.2 - S-O REVISEDBryan Dawi42% (12)
- MCQ Companion To The Eye Basic Sciences in PracticeDocument139 pagesMCQ Companion To The Eye Basic Sciences in PracticeАнагаахын ОрчуулгаNo ratings yet
- Land ClearingDocument9 pagesLand ClearingAzmi Fauzi100% (2)
- Mapping With GISDocument24 pagesMapping With GISAlfred TaylorNo ratings yet
- GPS (Global Positioning System) & DGPS (Differential Global Positioning System)Document103 pagesGPS (Global Positioning System) & DGPS (Differential Global Positioning System)NoCopyrightTunesNo ratings yet
- Er. Ganesh Raj Sharma: Be in Civil Engineering MSC in Structure, DremDocument32 pagesEr. Ganesh Raj Sharma: Be in Civil Engineering MSC in Structure, DremGanesh Raj SharmaNo ratings yet
- Introduction To Plane Surveying: by Rohayu Haron NarashidDocument48 pagesIntroduction To Plane Surveying: by Rohayu Haron NarashidsyarifuddinNo ratings yet
- Concept of Coordinate Systems and Map ProjectionsDocument65 pagesConcept of Coordinate Systems and Map ProjectionshabteNo ratings yet
- GPS BasicsDocument107 pagesGPS BasicsIsraa Omar100% (1)
- Global Positioning SystemDocument66 pagesGlobal Positioning SystemRamdas DevidasNo ratings yet
- Map Measurement and Transformation: Longley Et Al., Ch. 13Document40 pagesMap Measurement and Transformation: Longley Et Al., Ch. 13Emmanuel Abeashie MensahNo ratings yet
- GIS - Lecture 4 - Maps and GIS IIDocument20 pagesGIS - Lecture 4 - Maps and GIS IINimra KhanNo ratings yet
- Coordinates Datums Projections Apr 04Document19 pagesCoordinates Datums Projections Apr 04Hilmi Abdullah100% (1)
- Basic of GnssDocument170 pagesBasic of GnssAlex NkurunzizaNo ratings yet
- DBT123 Chapter 1 Introduction To Land SurveyingDocument43 pagesDBT123 Chapter 1 Introduction To Land SurveyingmunzirNo ratings yet
- PRR 6 2017Document46 pagesPRR 6 2017Antoci MarianNo ratings yet
- Lec 4Document53 pagesLec 4SUHAYB 96No ratings yet
- GPS by Akash AdwaniDocument40 pagesGPS by Akash Adwanisolalasolala7No ratings yet
- Survey Intro 2Document53 pagesSurvey Intro 2Anonymous nwByj9LNo ratings yet
- DBT123 Chapter 1 - Introduction To SurveyingDocument53 pagesDBT123 Chapter 1 - Introduction To Surveyingiisya6232No ratings yet
- Introduction 2Document42 pagesIntroduction 2Yafa AyyashNo ratings yet
- Global Positioning SystemDocument117 pagesGlobal Positioning SystemSaurabh SumanNo ratings yet
- Avleen GPS 2Document27 pagesAvleen GPS 2saabi singhNo ratings yet
- Introduction To Satellite Geodesy: Prof. M R SivaramanDocument56 pagesIntroduction To Satellite Geodesy: Prof. M R SivaramanPrasanna NaikNo ratings yet
- Chapter 1Document29 pagesChapter 1Kit Meng LimNo ratings yet
- Gis 01Document21 pagesGis 01asmakiran251No ratings yet
- 1-Difference Between Spatial Adjustment Georeferencing?: Write ONLY The Table in The ExamDocument7 pages1-Difference Between Spatial Adjustment Georeferencing?: Write ONLY The Table in The Exam4862 عمر منصور الأدهمNo ratings yet
- Pasang SurutDocument32 pagesPasang SurutRomi OktavianusNo ratings yet
- Geodesy and Map ProjectionsDocument46 pagesGeodesy and Map ProjectionsJavier Gismero100% (1)
- Satellite Data and CommunicationDocument33 pagesSatellite Data and CommunicationkentmultanNo ratings yet
- Satellite ImageryDocument21 pagesSatellite ImageryDaniel Georgian PislaruNo ratings yet
- Chapter 1: Fundamental Concepts: OverviewDocument5 pagesChapter 1: Fundamental Concepts: OverviewESTHER TEONo ratings yet
- SUG614-Chapter 1c - Datum Transformation PDFDocument47 pagesSUG614-Chapter 1c - Datum Transformation PDFFarisa ZulkifliNo ratings yet
- Presenting by Soundararajan.K. A M.Tech R.S & GISDocument25 pagesPresenting by Soundararajan.K. A M.Tech R.S & GISSoundararajan ArumugamNo ratings yet
- Geodetic Datum 1Document39 pagesGeodetic Datum 1Arga Fondra OksapingNo ratings yet
- Space Navigation: Part I: IntroductionDocument21 pagesSpace Navigation: Part I: IntroductionFelino SibonghanoyNo ratings yet
- GNSS/GPS BasicsDocument25 pagesGNSS/GPS BasicsSharfari MatNo ratings yet
- 1-KMJ16303 Introduction To GeomaticDocument51 pages1-KMJ16303 Introduction To GeomaticCt Kamariah Md SaatNo ratings yet
- Concept of Map ProjectionDocument25 pagesConcept of Map ProjectionSaurabh SumanNo ratings yet
- Surveying PowerpointDocument40 pagesSurveying PowerpointEarl Angelo AcuñaNo ratings yet
- Coordinate SystemDocument25 pagesCoordinate Systempwnjha100% (1)
- Unit I Surveying and GeomaticsDocument124 pagesUnit I Surveying and GeomaticsshivarajNo ratings yet
- CE 559 - Lecture 3Document25 pagesCE 559 - Lecture 3county192No ratings yet
- Lecture 1Document21 pagesLecture 1Daniel MunasheNo ratings yet
- Introduction To Remote Sensing and Geographical Information System in Civil EngineeringDocument40 pagesIntroduction To Remote Sensing and Geographical Information System in Civil EngineeringAyesha ImranNo ratings yet
- Coordinate SystemDocument42 pagesCoordinate SystemAsaad AshooNo ratings yet
- Coordinate Systems & Map Projection: Prof. M R Sivaraman 27 December 2018 Second Talk of The Webinar A Course of GeodesyDocument41 pagesCoordinate Systems & Map Projection: Prof. M R Sivaraman 27 December 2018 Second Talk of The Webinar A Course of GeodesyPrasanna Naik100% (1)
- Dr. Ahmed Said Eltrass: Global Positioning System (GPS)Document52 pagesDr. Ahmed Said Eltrass: Global Positioning System (GPS)Mina MounirNo ratings yet
- Introduction & Chain SurveyingDocument118 pagesIntroduction & Chain SurveyingprakashNo ratings yet
- Surveying Basics For SiteDocument53 pagesSurveying Basics For SitePramodNo ratings yet
- 8 - Topographic SurveysDocument4 pages8 - Topographic SurveysghadasalahNo ratings yet
- Topic3 Data Acquisition TechniquesDocument51 pagesTopic3 Data Acquisition TechniquesOlayinka AwoyaleNo ratings yet
- Introduction To Global Positioning System (GPS) : Fundamental ProblemDocument11 pagesIntroduction To Global Positioning System (GPS) : Fundamental ProblemAtiqur Rahman SakibNo ratings yet
- Print Komper 5Document11 pagesPrint Komper 5kanchi613220No ratings yet
- KuboDocument145 pagesKuboEdi KazuoNo ratings yet
- GMA220 SUT9 Lidar RS 25may2021Document29 pagesGMA220 SUT9 Lidar RS 25may2021Fanelo FelicityNo ratings yet
- Ssp-All Units NotesDocument221 pagesSsp-All Units NotesJanaki ManoharNo ratings yet
- Gps 2 SatellitesDocument56 pagesGps 2 SatellitesCyprian ObotaNo ratings yet
- Global Positioning System: By-Amol Desai Jay DesaiDocument36 pagesGlobal Positioning System: By-Amol Desai Jay DesaiJay DesaiNo ratings yet
- Site MappingDocument74 pagesSite MappingLina Michelle Matheson BrualNo ratings yet
- Lecture 2A Maps and GISDocument39 pagesLecture 2A Maps and GISRyana Rose CristobalNo ratings yet
- Land Survey Chapter 1Document48 pagesLand Survey Chapter 1Ruby Rosie100% (1)
- Remote Sensing & Geospatial Technologies Dictionary: Grow Your Vocabulary, #55From EverandRemote Sensing & Geospatial Technologies Dictionary: Grow Your Vocabulary, #55No ratings yet
- Benkelman DroneDocument25 pagesBenkelman DroneRebels BoxNo ratings yet
- Dumpexam: The Best Exam Dump, Valid Dumps PDF, Accurate Exam Materials ProviderDocument4 pagesDumpexam: The Best Exam Dump, Valid Dumps PDF, Accurate Exam Materials ProviderRebels BoxNo ratings yet
- Alibaba 05 PDFDocument89 pagesAlibaba 05 PDFRebels BoxNo ratings yet
- Alibaba 01 PDFDocument89 pagesAlibaba 01 PDFRebels BoxNo ratings yet
- Writing Research Papers James D Lester PDFDocument4 pagesWriting Research Papers James D Lester PDFgahebak1mez2100% (1)
- Biops JuliDocument13 pagesBiops Juliklinikutama KayoonNo ratings yet
- Modal Adverb Lesson PlanDocument4 pagesModal Adverb Lesson Planapi-587326479100% (1)
- Primary Connections - Heating UpDocument80 pagesPrimary Connections - Heating Upapi-391225671No ratings yet
- Arithmetic MeansDocument8 pagesArithmetic MeansMargie Ballesteros ManzanoNo ratings yet
- Balance of Payment - Chapter1 - IED - AssignmentDocument4 pagesBalance of Payment - Chapter1 - IED - Assignmentavika jainNo ratings yet
- Estimation of Hydraulic Conductivity From Grain Size AnalysesDocument96 pagesEstimation of Hydraulic Conductivity From Grain Size AnalysesmelvindanginNo ratings yet
- Analytic Marking Scheme To Assess Students' Oral SkillDocument6 pagesAnalytic Marking Scheme To Assess Students' Oral Skilliin hermiyantoNo ratings yet
- English For Academic and Professional Purposes: Learning Module 4: Objectives and Structures of Various Kinds of ReportsDocument6 pagesEnglish For Academic and Professional Purposes: Learning Module 4: Objectives and Structures of Various Kinds of ReportsReymart YagamiNo ratings yet
- Shared Information ModelDocument16 pagesShared Information Modelrohitchawandke100% (1)
- Electricity Bill Payment PDF FreeDocument16 pagesElectricity Bill Payment PDF Freekrishna mouliNo ratings yet
- Amanpulo FactsheetDocument6 pagesAmanpulo FactsheetAlexNo ratings yet
- Comprobante SantanderDocument26 pagesComprobante SantanderCristinaNo ratings yet
- Don Quijote Unit Summative AssessmentDocument1 pageDon Quijote Unit Summative AssessmentMaria MontoyaNo ratings yet
- Caspah - Kamunda 1593513704 ADocument42 pagesCaspah - Kamunda 1593513704 Ajoseph wamulumeNo ratings yet
- Basic Concepts in Nursing (Report)Document101 pagesBasic Concepts in Nursing (Report)NDJNo ratings yet
- LOC Taxed Under ITADocument3 pagesLOC Taxed Under ITARizhatul AizatNo ratings yet
- Ghirri - Redutores - Classificação - Um-Vs-Rev.20.06.06-Eng3Document35 pagesGhirri - Redutores - Classificação - Um-Vs-Rev.20.06.06-Eng3Jeferson DantasNo ratings yet
- CalendarDocument1 pageCalendarfattyfeet5No ratings yet
- Abhishek Shukla Project Reporton (Power Purchase)Document57 pagesAbhishek Shukla Project Reporton (Power Purchase)beast singhNo ratings yet
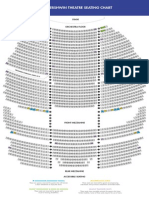
- The Gershwin Theatre Seating Chart: StageDocument1 pageThe Gershwin Theatre Seating Chart: StageCharles DavidsonNo ratings yet
- FRB13089887411Document4 pagesFRB13089887411MAHA KAALNo ratings yet
- Varsity KA Class & Exam Routine (Part-01)Document2 pagesVarsity KA Class & Exam Routine (Part-01)Yousuf JamilNo ratings yet
- Chapter 6 Financial AssetsDocument6 pagesChapter 6 Financial AssetsJoyce Mae D. FloresNo ratings yet
- Configure Anyconnect 00Document22 pagesConfigure Anyconnect 00Ruben VillafaniNo ratings yet
- Y8 History 2020Document44 pagesY8 History 2020mahaNo ratings yet
- Efhkessa PDF 1698096163Document16 pagesEfhkessa PDF 1698096163Antoni GarciaNo ratings yet

























































































Download as pdf or txt
You might also like
- Paper Trade TJS Elite v8.9.2 - S-O REVISEDDocument1,170 pagesPaper Trade TJS Elite v8.9.2 - S-O REVISEDBryan Dawi42% (12)
- MCQ Companion To The Eye Basic Sciences in PracticeDocument139 pagesMCQ Companion To The Eye Basic Sciences in PracticeАнагаахын ОрчуулгаNo ratings yet
- Land ClearingDocument9 pagesLand ClearingAzmi Fauzi100% (2)
- Mapping With GISDocument24 pagesMapping With GISAlfred TaylorNo ratings yet
- GPS (Global Positioning System) & DGPS (Differential Global Positioning System)Document103 pagesGPS (Global Positioning System) & DGPS (Differential Global Positioning System)NoCopyrightTunesNo ratings yet
- Er. Ganesh Raj Sharma: Be in Civil Engineering MSC in Structure, DremDocument32 pagesEr. Ganesh Raj Sharma: Be in Civil Engineering MSC in Structure, DremGanesh Raj SharmaNo ratings yet
- Introduction To Plane Surveying: by Rohayu Haron NarashidDocument48 pagesIntroduction To Plane Surveying: by Rohayu Haron NarashidsyarifuddinNo ratings yet
- Concept of Coordinate Systems and Map ProjectionsDocument65 pagesConcept of Coordinate Systems and Map ProjectionshabteNo ratings yet
- GPS BasicsDocument107 pagesGPS BasicsIsraa Omar100% (1)
- Global Positioning SystemDocument66 pagesGlobal Positioning SystemRamdas DevidasNo ratings yet
- Map Measurement and Transformation: Longley Et Al., Ch. 13Document40 pagesMap Measurement and Transformation: Longley Et Al., Ch. 13Emmanuel Abeashie MensahNo ratings yet
- GIS - Lecture 4 - Maps and GIS IIDocument20 pagesGIS - Lecture 4 - Maps and GIS IINimra KhanNo ratings yet
- Coordinates Datums Projections Apr 04Document19 pagesCoordinates Datums Projections Apr 04Hilmi Abdullah100% (1)
- Basic of GnssDocument170 pagesBasic of GnssAlex NkurunzizaNo ratings yet
- DBT123 Chapter 1 Introduction To Land SurveyingDocument43 pagesDBT123 Chapter 1 Introduction To Land SurveyingmunzirNo ratings yet
- PRR 6 2017Document46 pagesPRR 6 2017Antoci MarianNo ratings yet
- Lec 4Document53 pagesLec 4SUHAYB 96No ratings yet
- GPS by Akash AdwaniDocument40 pagesGPS by Akash Adwanisolalasolala7No ratings yet
- Survey Intro 2Document53 pagesSurvey Intro 2Anonymous nwByj9LNo ratings yet
- DBT123 Chapter 1 - Introduction To SurveyingDocument53 pagesDBT123 Chapter 1 - Introduction To Surveyingiisya6232No ratings yet
- Introduction 2Document42 pagesIntroduction 2Yafa AyyashNo ratings yet
- Global Positioning SystemDocument117 pagesGlobal Positioning SystemSaurabh SumanNo ratings yet
- Avleen GPS 2Document27 pagesAvleen GPS 2saabi singhNo ratings yet
- Introduction To Satellite Geodesy: Prof. M R SivaramanDocument56 pagesIntroduction To Satellite Geodesy: Prof. M R SivaramanPrasanna NaikNo ratings yet
- Chapter 1Document29 pagesChapter 1Kit Meng LimNo ratings yet
- Gis 01Document21 pagesGis 01asmakiran251No ratings yet
- 1-Difference Between Spatial Adjustment Georeferencing?: Write ONLY The Table in The ExamDocument7 pages1-Difference Between Spatial Adjustment Georeferencing?: Write ONLY The Table in The Exam4862 عمر منصور الأدهمNo ratings yet
- Pasang SurutDocument32 pagesPasang SurutRomi OktavianusNo ratings yet
- Geodesy and Map ProjectionsDocument46 pagesGeodesy and Map ProjectionsJavier Gismero100% (1)
- Satellite Data and CommunicationDocument33 pagesSatellite Data and CommunicationkentmultanNo ratings yet
- Satellite ImageryDocument21 pagesSatellite ImageryDaniel Georgian PislaruNo ratings yet
- Chapter 1: Fundamental Concepts: OverviewDocument5 pagesChapter 1: Fundamental Concepts: OverviewESTHER TEONo ratings yet
- SUG614-Chapter 1c - Datum Transformation PDFDocument47 pagesSUG614-Chapter 1c - Datum Transformation PDFFarisa ZulkifliNo ratings yet
- Presenting by Soundararajan.K. A M.Tech R.S & GISDocument25 pagesPresenting by Soundararajan.K. A M.Tech R.S & GISSoundararajan ArumugamNo ratings yet
- Geodetic Datum 1Document39 pagesGeodetic Datum 1Arga Fondra OksapingNo ratings yet
- Space Navigation: Part I: IntroductionDocument21 pagesSpace Navigation: Part I: IntroductionFelino SibonghanoyNo ratings yet
- GNSS/GPS BasicsDocument25 pagesGNSS/GPS BasicsSharfari MatNo ratings yet
- 1-KMJ16303 Introduction To GeomaticDocument51 pages1-KMJ16303 Introduction To GeomaticCt Kamariah Md SaatNo ratings yet
- Concept of Map ProjectionDocument25 pagesConcept of Map ProjectionSaurabh SumanNo ratings yet
- Surveying PowerpointDocument40 pagesSurveying PowerpointEarl Angelo AcuñaNo ratings yet
- Coordinate SystemDocument25 pagesCoordinate Systempwnjha100% (1)
- Unit I Surveying and GeomaticsDocument124 pagesUnit I Surveying and GeomaticsshivarajNo ratings yet
- CE 559 - Lecture 3Document25 pagesCE 559 - Lecture 3county192No ratings yet
- Lecture 1Document21 pagesLecture 1Daniel MunasheNo ratings yet
- Introduction To Remote Sensing and Geographical Information System in Civil EngineeringDocument40 pagesIntroduction To Remote Sensing and Geographical Information System in Civil EngineeringAyesha ImranNo ratings yet
- Coordinate SystemDocument42 pagesCoordinate SystemAsaad AshooNo ratings yet
- Coordinate Systems & Map Projection: Prof. M R Sivaraman 27 December 2018 Second Talk of The Webinar A Course of GeodesyDocument41 pagesCoordinate Systems & Map Projection: Prof. M R Sivaraman 27 December 2018 Second Talk of The Webinar A Course of GeodesyPrasanna Naik100% (1)
- Dr. Ahmed Said Eltrass: Global Positioning System (GPS)Document52 pagesDr. Ahmed Said Eltrass: Global Positioning System (GPS)Mina MounirNo ratings yet
- Introduction & Chain SurveyingDocument118 pagesIntroduction & Chain SurveyingprakashNo ratings yet
- Surveying Basics For SiteDocument53 pagesSurveying Basics For SitePramodNo ratings yet
- 8 - Topographic SurveysDocument4 pages8 - Topographic SurveysghadasalahNo ratings yet
- Topic3 Data Acquisition TechniquesDocument51 pagesTopic3 Data Acquisition TechniquesOlayinka AwoyaleNo ratings yet
- Introduction To Global Positioning System (GPS) : Fundamental ProblemDocument11 pagesIntroduction To Global Positioning System (GPS) : Fundamental ProblemAtiqur Rahman SakibNo ratings yet
- Print Komper 5Document11 pagesPrint Komper 5kanchi613220No ratings yet
- KuboDocument145 pagesKuboEdi KazuoNo ratings yet
- GMA220 SUT9 Lidar RS 25may2021Document29 pagesGMA220 SUT9 Lidar RS 25may2021Fanelo FelicityNo ratings yet
- Ssp-All Units NotesDocument221 pagesSsp-All Units NotesJanaki ManoharNo ratings yet
- Gps 2 SatellitesDocument56 pagesGps 2 SatellitesCyprian ObotaNo ratings yet
- Global Positioning System: By-Amol Desai Jay DesaiDocument36 pagesGlobal Positioning System: By-Amol Desai Jay DesaiJay DesaiNo ratings yet
- Site MappingDocument74 pagesSite MappingLina Michelle Matheson BrualNo ratings yet
- Lecture 2A Maps and GISDocument39 pagesLecture 2A Maps and GISRyana Rose CristobalNo ratings yet
- Land Survey Chapter 1Document48 pagesLand Survey Chapter 1Ruby Rosie100% (1)
- Remote Sensing & Geospatial Technologies Dictionary: Grow Your Vocabulary, #55From EverandRemote Sensing & Geospatial Technologies Dictionary: Grow Your Vocabulary, #55No ratings yet
- Benkelman DroneDocument25 pagesBenkelman DroneRebels BoxNo ratings yet
- Dumpexam: The Best Exam Dump, Valid Dumps PDF, Accurate Exam Materials ProviderDocument4 pagesDumpexam: The Best Exam Dump, Valid Dumps PDF, Accurate Exam Materials ProviderRebels BoxNo ratings yet
- Alibaba 05 PDFDocument89 pagesAlibaba 05 PDFRebels BoxNo ratings yet
- Alibaba 01 PDFDocument89 pagesAlibaba 01 PDFRebels BoxNo ratings yet
- Writing Research Papers James D Lester PDFDocument4 pagesWriting Research Papers James D Lester PDFgahebak1mez2100% (1)
- Biops JuliDocument13 pagesBiops Juliklinikutama KayoonNo ratings yet
- Modal Adverb Lesson PlanDocument4 pagesModal Adverb Lesson Planapi-587326479100% (1)
- Primary Connections - Heating UpDocument80 pagesPrimary Connections - Heating Upapi-391225671No ratings yet
- Arithmetic MeansDocument8 pagesArithmetic MeansMargie Ballesteros ManzanoNo ratings yet
- Balance of Payment - Chapter1 - IED - AssignmentDocument4 pagesBalance of Payment - Chapter1 - IED - Assignmentavika jainNo ratings yet
- Estimation of Hydraulic Conductivity From Grain Size AnalysesDocument96 pagesEstimation of Hydraulic Conductivity From Grain Size AnalysesmelvindanginNo ratings yet
- Analytic Marking Scheme To Assess Students' Oral SkillDocument6 pagesAnalytic Marking Scheme To Assess Students' Oral Skilliin hermiyantoNo ratings yet
- English For Academic and Professional Purposes: Learning Module 4: Objectives and Structures of Various Kinds of ReportsDocument6 pagesEnglish For Academic and Professional Purposes: Learning Module 4: Objectives and Structures of Various Kinds of ReportsReymart YagamiNo ratings yet
- Shared Information ModelDocument16 pagesShared Information Modelrohitchawandke100% (1)
- Electricity Bill Payment PDF FreeDocument16 pagesElectricity Bill Payment PDF Freekrishna mouliNo ratings yet
- Amanpulo FactsheetDocument6 pagesAmanpulo FactsheetAlexNo ratings yet
- Comprobante SantanderDocument26 pagesComprobante SantanderCristinaNo ratings yet
- Don Quijote Unit Summative AssessmentDocument1 pageDon Quijote Unit Summative AssessmentMaria MontoyaNo ratings yet
- Caspah - Kamunda 1593513704 ADocument42 pagesCaspah - Kamunda 1593513704 Ajoseph wamulumeNo ratings yet
- Basic Concepts in Nursing (Report)Document101 pagesBasic Concepts in Nursing (Report)NDJNo ratings yet
- LOC Taxed Under ITADocument3 pagesLOC Taxed Under ITARizhatul AizatNo ratings yet
- Ghirri - Redutores - Classificação - Um-Vs-Rev.20.06.06-Eng3Document35 pagesGhirri - Redutores - Classificação - Um-Vs-Rev.20.06.06-Eng3Jeferson DantasNo ratings yet
- CalendarDocument1 pageCalendarfattyfeet5No ratings yet
- Abhishek Shukla Project Reporton (Power Purchase)Document57 pagesAbhishek Shukla Project Reporton (Power Purchase)beast singhNo ratings yet
- The Gershwin Theatre Seating Chart: StageDocument1 pageThe Gershwin Theatre Seating Chart: StageCharles DavidsonNo ratings yet
- FRB13089887411Document4 pagesFRB13089887411MAHA KAALNo ratings yet
- Varsity KA Class & Exam Routine (Part-01)Document2 pagesVarsity KA Class & Exam Routine (Part-01)Yousuf JamilNo ratings yet
- Chapter 6 Financial AssetsDocument6 pagesChapter 6 Financial AssetsJoyce Mae D. FloresNo ratings yet
- Configure Anyconnect 00Document22 pagesConfigure Anyconnect 00Ruben VillafaniNo ratings yet
- Y8 History 2020Document44 pagesY8 History 2020mahaNo ratings yet
- Efhkessa PDF 1698096163Document16 pagesEfhkessa PDF 1698096163Antoni GarciaNo ratings yet