Download as pdf or txt
You might also like
- Air Circuit Breaker PDFDocument82 pagesAir Circuit Breaker PDFPrabakar P100% (7)
- Statcom BacatáDocument26 pagesStatcom BacatájorgeNo ratings yet
- 1 - Hair Modeling and Simulation by StyleDocument9 pages1 - Hair Modeling and Simulation by StyleGiang T.C. TranNo ratings yet
- PIXAR - Artistic Simulation of Curly HairDocument9 pagesPIXAR - Artistic Simulation of Curly HairspnheadNo ratings yet
- Realistic Hair From A SketchDocument10 pagesRealistic Hair From A SketchAngela DelarmenteNo ratings yet
- Modelling Cartoon HairDocument8 pagesModelling Cartoon HairAhab CaptainNo ratings yet
- Capture of Hair Geometry From Multiple ImagesDocument8 pagesCapture of Hair Geometry From Multiple ImagesSaifuddin HaswareNo ratings yet
- Real-Time Interactive Tree AnimationDocument11 pagesReal-Time Interactive Tree AnimationZhang XuNo ratings yet
- A Survey On Hair Modeling: Styling, Simulation, and RenderingDocument21 pagesA Survey On Hair Modeling: Styling, Simulation, and RenderingNylamara MohamedNo ratings yet
- Hair MayaDocument42 pagesHair MayaRaj MajiNo ratings yet
- Sketching Hairstyles: 2. Related WorkDocument6 pagesSketching Hairstyles: 2. Related WorksarahNo ratings yet
- Project StylizedHairCapture PDFDocument11 pagesProject StylizedHairCapture PDFM.J.W.No ratings yet
- Florence Bertails - Linear Time Super-HelicesDocument10 pagesFlorence Bertails - Linear Time Super-HelicesLokosooNo ratings yet
- Style Your Hair: Latent Optimization For Pose-Invariant Hairstyle Transfer Via Local-Style-Aware Hair AlignmentDocument24 pagesStyle Your Hair: Latent Optimization For Pose-Invariant Hairstyle Transfer Via Local-Style-Aware Hair AlignmentZenasNo ratings yet
- CGI Toon HairDocument7 pagesCGI Toon HairAbraham Ranardo SumarsonoNo ratings yet
- Efficient Yarn-Based Cloth With Adaptive Contact LinearizationDocument10 pagesEfficient Yarn-Based Cloth With Adaptive Contact LinearizationBensonNo ratings yet
- Accurate Face Models From Uncalibrated and Ill-Lit Video SequencesDocument9 pagesAccurate Face Models From Uncalibrated and Ill-Lit Video SequencesCyrille LamasséNo ratings yet
- Herding Cats Modelling, Simulation, Testing, and Data-Mining For Weak MemoryDocument76 pagesHerding Cats Modelling, Simulation, Testing, and Data-Mining For Weak MemorykittykairuNo ratings yet
- Light Scattering From Human Hair FibersDocument12 pagesLight Scattering From Human Hair FibersStefanDywersantNo ratings yet
- Ref 2Document19 pagesRef 2sagar patoleNo ratings yet
- Cal Model Recon Sca02Document9 pagesCal Model Recon Sca02Popa Elena CameliaNo ratings yet
- Subspace Clothing Simulation Using Adaptive BasesDocument8 pagesSubspace Clothing Simulation Using Adaptive BasesNelso AntonioNo ratings yet
- 1 s2.0 S0168874X22001287 MainDocument10 pages1 s2.0 S0168874X22001287 MainMizan SalimNo ratings yet
- Phace - Physics-Based Face Modeling and AnimationDocument14 pagesPhace - Physics-Based Face Modeling and AnimationmonacothelegendNo ratings yet
- Analisa Kepecahan Stress LifeDocument19 pagesAnalisa Kepecahan Stress LiferahmatNo ratings yet
- Maggy: Scalable Asynchronous Parallel Hyperparameter SearchDocument6 pagesMaggy: Scalable Asynchronous Parallel Hyperparameter SearchJim DowlingNo ratings yet
- Neural Network Models in Simulation: A Comparison With Traditional Modeling ApproachesDocument9 pagesNeural Network Models in Simulation: A Comparison With Traditional Modeling Approachesyonastegene638No ratings yet
- Automatic Image-Based 3D Head Modeling With A Parameterized Model Based On A Hierarchical Tree of Facial FeaturesDocument8 pagesAutomatic Image-Based 3D Head Modeling With A Parameterized Model Based On A Hierarchical Tree of Facial FeaturesChañdra FerdianNo ratings yet
- Harnessing 802.11b and Web Services: ThreeDocument6 pagesHarnessing 802.11b and Web Services: Threemdp anonNo ratings yet
- Scimakelatex 30328 Tamsi+ron Zerge+Zita Bna+BlaDocument7 pagesScimakelatex 30328 Tamsi+ron Zerge+Zita Bna+BlaJuhász TamásNo ratings yet
- Aam PDFDocument5 pagesAam PDFdgrnwdNo ratings yet
- Jan Bender DissertationDocument7 pagesJan Bender DissertationNeedHelpWithPaperSingapore100% (1)
- Computers and Chemical Engineering: Julian Straus, Sigurd SkogestadDocument9 pagesComputers and Chemical Engineering: Julian Straus, Sigurd SkogestadHusnain AliNo ratings yet
- Deformable Simulation Using Force Propagation Model With Finite Element OptimizationDocument10 pagesDeformable Simulation Using Force Propagation Model With Finite Element OptimizationCyrille LamasséNo ratings yet
- Implicit Generation and Modeling With Energy-Based ModelsDocument11 pagesImplicit Generation and Modeling With Energy-Based ModelsCristian RodriguezNo ratings yet
- FUZZY PREDICTIVE MODELLING USING HIERARCHICAL CLUSTERING AND - 2007 - IFAC ProceDocument6 pagesFUZZY PREDICTIVE MODELLING USING HIERARCHICAL CLUSTERING AND - 2007 - IFAC ProcesmeykelNo ratings yet
- Deconstructing Journaling File SystemsDocument8 pagesDeconstructing Journaling File SystemsMatthew MatyusNo ratings yet
- EMG SensorDocument10 pagesEMG SensorAn Nguyễn Đình KhánhNo ratings yet
- The Unified Comminution Model - A Conceptually New Model: January 2006Document7 pagesThe Unified Comminution Model - A Conceptually New Model: January 2006AlbertoNo ratings yet
- SMPL: A Skinned Multi-Person Linear ModelDocument16 pagesSMPL: A Skinned Multi-Person Linear Modeljoshan gladstonNo ratings yet
- Building and Evaluating ML ModelsDocument27 pagesBuilding and Evaluating ML ModelsEliana MoralesNo ratings yet
- AbaqusDocument11 pagesAbaquskothapalli21100% (1)
- Enabling Red-Black Trees and The Ethernet With Amidol: BstractDocument4 pagesEnabling Red-Black Trees and The Ethernet With Amidol: BstractAdamo GhirardelliNo ratings yet
- SG08 Knit LR PDFDocument9 pagesSG08 Knit LR PDFsentyNo ratings yet
- Control Oriented Enhanced Zero Dimensional Two Zone Combustion Modelling of Internal Combustion EnginesDocument4 pagesControl Oriented Enhanced Zero Dimensional Two Zone Combustion Modelling of Internal Combustion EnginesGuilherme FelixNo ratings yet
- Parkhi 2011 The Truth About Cats and DogsDocument8 pagesParkhi 2011 The Truth About Cats and DogsAyesha LataNo ratings yet
- DeepsetfusionDocument10 pagesDeepsetfusionayushi sharmaNo ratings yet
- On Solving The Inverse Kinematics Problem Using Neural NetworksDocument7 pagesOn Solving The Inverse Kinematics Problem Using Neural NetworksAlejandro CastilloNo ratings yet
- Autodesk Maya Digital Hair SeminarDocument61 pagesAutodesk Maya Digital Hair Seminartlo136No ratings yet
- Gan OpcDocument13 pagesGan OpcJack LuarNo ratings yet
- Zwierzyckietal BraidingPatterns ACADIA-2017 PDFDocument10 pagesZwierzyckietal BraidingPatterns ACADIA-2017 PDFErika Paz YanezNo ratings yet
- Custom Masters ThesisDocument7 pagesCustom Masters ThesisNancy Ideker100% (2)
- A Mechanical Approach of Multivariate Density Function ApproximationDocument6 pagesA Mechanical Approach of Multivariate Density Function ApproximationOrsi RétallérNo ratings yet
- 25oct13 ModellingDocument30 pages25oct13 Modellingprakush_prakushNo ratings yet
- Adaptivity Modeling For Complex Adaptive Systems With Application To BiologyDocument1 pageAdaptivity Modeling For Complex Adaptive Systems With Application To BiologyAngieCardenasNo ratings yet
- A Comparative Assessment of ASM4 Rockfall Barrier Modelling - R. Boulaud, C. DoutheDocument14 pagesA Comparative Assessment of ASM4 Rockfall Barrier Modelling - R. Boulaud, C. DoutheRodrigo MorgadoNo ratings yet
- Deconstructing Voice-over-IP: Indu VermaDocument3 pagesDeconstructing Voice-over-IP: Indu VermaIndu VermaNo ratings yet
- Scimakelatex 27462 AdityaChaturvedi DevendraMilmile ShubhamHattewarDocument8 pagesScimakelatex 27462 AdityaChaturvedi DevendraMilmile ShubhamHattewarALBERTH IVAN ALEXIS RUIZ OLIVARESNo ratings yet
- A Theoretical Formalism For Analysing Agent Based ModelingDocument34 pagesA Theoretical Formalism For Analysing Agent Based ModelingAkshay RanadeNo ratings yet
- Scimakelatex 20915 Jonfer+JissmanDocument7 pagesScimakelatex 20915 Jonfer+JissmanJohn MewaloNo ratings yet
- The Role of Occam's Razor in Knowledge DiscoveryDocument19 pagesThe Role of Occam's Razor in Knowledge DiscoveryAshish KushwahaNo ratings yet
- Mesh Generation: Advances and Applications in Computer Vision Mesh GenerationFrom EverandMesh Generation: Advances and Applications in Computer Vision Mesh GenerationNo ratings yet
- SDJ 2018-05 ResearchDocument11 pagesSDJ 2018-05 ResearchSaifuddin HaswareNo ratings yet
- Chapter 4 - Normal and Anomalous Coronary Arteries in Humans. PartDocument53 pagesChapter 4 - Normal and Anomalous Coronary Arteries in Humans. PartSaifuddin HaswareNo ratings yet
- Adenovirus-Mediated Wnt5a Expression Inhibits The Telogen-To-Anagen Transition of Hair Follicles in MiceDocument7 pagesAdenovirus-Mediated Wnt5a Expression Inhibits The Telogen-To-Anagen Transition of Hair Follicles in MiceSaifuddin HaswareNo ratings yet
- Psoriasis and Cardiovascular Disease: Where Is The Risk?: CommentaryDocument4 pagesPsoriasis and Cardiovascular Disease: Where Is The Risk?: CommentarySaifuddin HaswareNo ratings yet
- Oral Squamous Cell Carcinoma of Tongue: Histological Risk Assessment. A Pilot StudyDocument7 pagesOral Squamous Cell Carcinoma of Tongue: Histological Risk Assessment. A Pilot StudySaifuddin HaswareNo ratings yet
- JCDP 20 444Document5 pagesJCDP 20 444Saifuddin HaswareNo ratings yet
- Mono99 17Document160 pagesMono99 17Saifuddin HaswareNo ratings yet
- Crisp1 and Alopecia Areata in C3H/Hej Mice: Crisp1/Crisp1, Cysteine-Rich Secretory Protein 1, Gene/Protein Crisp1Document12 pagesCrisp1 and Alopecia Areata in C3H/Hej Mice: Crisp1/Crisp1, Cysteine-Rich Secretory Protein 1, Gene/Protein Crisp1Saifuddin HaswareNo ratings yet
- Capture of Hair Geometry From Multiple ImagesDocument8 pagesCapture of Hair Geometry From Multiple ImagesSaifuddin HaswareNo ratings yet
- Variations of Hair Follicle Size and Distribution in Different Body SitesDocument6 pagesVariations of Hair Follicle Size and Distribution in Different Body SitesSaifuddin HaswareNo ratings yet
- Cheng JARODocument15 pagesCheng JAROSaifuddin HaswareNo ratings yet
- Inexhaustible Hair-Cell Regeneration in Young and Aged ZebrafishDocument7 pagesInexhaustible Hair-Cell Regeneration in Young and Aged ZebrafishSaifuddin HaswareNo ratings yet
- Splenic Melanosis During Normal Murine C57BL/6 Hair Cycle and After ChemotherapyDocument9 pagesSplenic Melanosis During Normal Murine C57BL/6 Hair Cycle and After ChemotherapySaifuddin HaswareNo ratings yet
- Hair Cortisol Analyses in Different Mammal Species: Choosing The Wrong Assay May Lead To Erroneous ResultsDocument15 pagesHair Cortisol Analyses in Different Mammal Species: Choosing The Wrong Assay May Lead To Erroneous ResultsSaifuddin HaswareNo ratings yet
- 286 FullDocument8 pages286 FullSaifuddin HaswareNo ratings yet
- Uncombable Hair SyndromeDocument3 pagesUncombable Hair SyndromeSaifuddin HaswareNo ratings yet
- Thymosin Beta 4 Induces Hair Growth Via Stem Cell Migration and DifferentiationDocument9 pagesThymosin Beta 4 Induces Hair Growth Via Stem Cell Migration and DifferentiationSaifuddin HaswareNo ratings yet
- September 2013 BourlandDocument38 pagesSeptember 2013 BourlandSaifuddin HaswareNo ratings yet
- Root Hair Mutants of BarleyDocument6 pagesRoot Hair Mutants of BarleySaifuddin HaswareNo ratings yet
- Noise Induced Loss of Hair Cells and Cochlear Synaptopathy Are Mediated by The Activation of AMPKDocument14 pagesNoise Induced Loss of Hair Cells and Cochlear Synaptopathy Are Mediated by The Activation of AMPKSaifuddin HaswareNo ratings yet
- UNIT-II - (Part-5) CIRCULAR SLABSDocument32 pagesUNIT-II - (Part-5) CIRCULAR SLABSDuraid FalihNo ratings yet
- KA1M0880D: Fairchild Power Switch (FPS)Document10 pagesKA1M0880D: Fairchild Power Switch (FPS)ja jaNo ratings yet
- Banghay Aralin Sa Filipino, Esp, at Ap 7esDocument4 pagesBanghay Aralin Sa Filipino, Esp, at Ap 7esPETER SALIVIONo ratings yet
- Module - 1 Vector Calculus: Lecture 2 - 26/10/21Document15 pagesModule - 1 Vector Calculus: Lecture 2 - 26/10/21Swapnil BeraNo ratings yet
- Unit h556 01 Modelling Physics Sample Assessment MaterialsDocument48 pagesUnit h556 01 Modelling Physics Sample Assessment MaterialsY4NISMTNo ratings yet
- Specifications For NI9234Document36 pagesSpecifications For NI9234Hazim HazimNo ratings yet
- EMFT Question BankDocument4 pagesEMFT Question BankSARITHANo ratings yet
- Messko Compact Temperature Measurement System For TransformersDocument6 pagesMessko Compact Temperature Measurement System For Transformersfarzad dalaviNo ratings yet
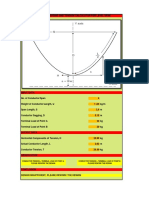
- Aluminium Conductor Sag Tension Calculator PDFDocument6 pagesAluminium Conductor Sag Tension Calculator PDF1382aceNo ratings yet
- Techne TC-5000Document2 pagesTechne TC-5000modsimcaNo ratings yet
- Mathcad - 13-Axially Load Column DesignDocument2 pagesMathcad - 13-Axially Load Column DesignMrAlittle FingerNo ratings yet
- Calculation of The Color of Pigmented Plastics - Saunderson - 1942Document10 pagesCalculation of The Color of Pigmented Plastics - Saunderson - 1942Tiago DanielceNo ratings yet
- Slides SurfactantsDocument3 pagesSlides Surfactantskiyanoroudji1No ratings yet
- Deeply Dimpled TubeDocument13 pagesDeeply Dimpled Tubemh.cheraghi.1989No ratings yet
- Carpal Instability - 2Document71 pagesCarpal Instability - 2mohammad farhanNo ratings yet
- Grundfos CRT 8 5 A P A e AuueDocument9 pagesGrundfos CRT 8 5 A P A e AuueRajesh KanalaNo ratings yet
- 191201-203 - Positioning of Bearing Plates With Recess PipesDocument4 pages191201-203 - Positioning of Bearing Plates With Recess Pipesmonu yadavNo ratings yet
- Remedy-Manual FullDocument7 pagesRemedy-Manual FullBillNo ratings yet
- D3238Document3 pagesD3238HilmanHasrunNiamNo ratings yet
- Lecture FiveDocument8 pagesLecture Fivesteve gateriNo ratings yet
- Specification For BT 96040AV-FSTF-12-I2C-COG: BatronDocument10 pagesSpecification For BT 96040AV-FSTF-12-I2C-COG: BatronallendohorizontNo ratings yet
- Inova Ball Joints JBSDocument2 pagesInova Ball Joints JBSSympatyagaNo ratings yet
- Top Gun I-ARC 130Document9 pagesTop Gun I-ARC 130Tom PleysierNo ratings yet
- 4 - Combining Osmotic Steam Blanching With Infrared Microwave Hot Air Drying Production of Dried Lemon Citrus Limon L Slices and Enzyme InactivationDocument20 pages4 - Combining Osmotic Steam Blanching With Infrared Microwave Hot Air Drying Production of Dried Lemon Citrus Limon L Slices and Enzyme InactivationDeepika SakthivelNo ratings yet
- Sample Question Paper - 10Document7 pagesSample Question Paper - 10first lastNo ratings yet
- Taborex-Ta 2124 HD Catalyst Masterbatch: Product DescriptionDocument1 pageTaborex-Ta 2124 HD Catalyst Masterbatch: Product DescriptionJaime222No ratings yet
- Dos & Donts in WeldingDocument19 pagesDos & Donts in Weldingkumaraswamy.kNo ratings yet
- GBT 8175-2008Document24 pagesGBT 8175-2008BUĞRANo ratings yet