Download as pdf or txt
You might also like
- Time Dependent Deformations in Squeezing Tunnels: G. Barla, M. Bonini and D. DebernardiDocument11 pagesTime Dependent Deformations in Squeezing Tunnels: G. Barla, M. Bonini and D. DebernardiAlket DhamiNo ratings yet
- Time-Dependent Tunnel Convergence II. Advance Rate and Tunnel-Support InteractionDocument12 pagesTime-Dependent Tunnel Convergence II. Advance Rate and Tunnel-Support InteractionSoto SimónNo ratings yet
- Fundamental Modal Properties of Simply Supported Railway Bridges Considering Soil-Structure Interaction EffectsDocument20 pagesFundamental Modal Properties of Simply Supported Railway Bridges Considering Soil-Structure Interaction EffectsabdulNo ratings yet
- Semi-Analytical Solution For Time-Dependent Deformations in - Parsapour, Davoud Fahimifar, Ahmad - Geosciences Journal, #4, 20, Pages 517-528Document12 pagesSemi-Analytical Solution For Time-Dependent Deformations in - Parsapour, Davoud Fahimifar, Ahmad - Geosciences Journal, #4, 20, Pages 517-528José Luis Rodríguez SánchezNo ratings yet
- Elastoplastic CreepDocument9 pagesElastoplastic CreepputriNo ratings yet
- Effect of Differential Creep and Shrinkage On Prestressed Composite Concrete SectionsDocument15 pagesEffect of Differential Creep and Shrinkage On Prestressed Composite Concrete SectionsThomas WilsonNo ratings yet
- Sterpi Creep Squeezing PDFDocument21 pagesSterpi Creep Squeezing PDFmuddu_hc5248No ratings yet
- The Beads-On-String Structure of Viscoelastic Threads: Bychristianclasen Marcoa - Fontelos Garethh - MckinleyDocument26 pagesThe Beads-On-String Structure of Viscoelastic Threads: Bychristianclasen Marcoa - Fontelos Garethh - Mckinleymani245rocksNo ratings yet
- Cjce 20417Document11 pagesCjce 20417rajuvadlakondaNo ratings yet
- SPE 148078 Dual-Permeability Model For Coupled Reservoir Geomechanical Modeling: Application For Field Production DataDocument10 pagesSPE 148078 Dual-Permeability Model For Coupled Reservoir Geomechanical Modeling: Application For Field Production DataRomel Angel Erazo BoneNo ratings yet
- LV 2013Document10 pagesLV 2013Chingiz QarayevNo ratings yet
- 1 s2.0 S0009250901002731 MainDocument41 pages1 s2.0 S0009250901002731 Mainjoao.ferro.engNo ratings yet
- Singular 27Document42 pagesSingular 27Phạm Thái HọcNo ratings yet
- Batta1996 PDFDocument16 pagesBatta1996 PDFDaniel EscobarNo ratings yet
- Wan 2021 IOP Conf. Ser. Earth Environ. Sci. 651 032077Document13 pagesWan 2021 IOP Conf. Ser. Earth Environ. Sci. 651 032077shiva rajNo ratings yet
- 13 933 PDFDocument15 pages13 933 PDFsatyamNo ratings yet
- Numerical Simulation of Fluid Flow Through Fractal-Based Discrete Fractured NetworkDocument15 pagesNumerical Simulation of Fluid Flow Through Fractal-Based Discrete Fractured Networksameer bakshiNo ratings yet
- Concrete Cracking inDocument9 pagesConcrete Cracking inmutiaralfiantiNo ratings yet
- Concrete Cracking in Tension Members and Application To Deck Slabs of BridgesDocument9 pagesConcrete Cracking in Tension Members and Application To Deck Slabs of BridgesTardzenyuy GlenNo ratings yet
- Nonlinear Creep and Cracking of Concrete Under CompressionDocument11 pagesNonlinear Creep and Cracking of Concrete Under CompressionThomás LimaNo ratings yet
- Corbett2010 - Numerical Reservoir ModellingDocument10 pagesCorbett2010 - Numerical Reservoir ModellingCristian MendozaNo ratings yet
- 2017 - WCEE2017 4562 Luders CriadoDocument12 pages2017 - WCEE2017 4562 Luders CriadoJose Luis DominguezNo ratings yet
- Two-Phase Flow Simulation of Tunnel and Lee-Wake Erosion of Scour Below A Submarine PipelineDocument17 pagesTwo-Phase Flow Simulation of Tunnel and Lee-Wake Erosion of Scour Below A Submarine PipelineBoyuan YuNo ratings yet
- Cavitation in Unfilled and Nano-CACO3 Filled HDPE Subjected To Tensile Test. Revelation, Localization, and QuantificationDocument12 pagesCavitation in Unfilled and Nano-CACO3 Filled HDPE Subjected To Tensile Test. Revelation, Localization, and QuantificationUriel PeñaNo ratings yet
- Three-Dimensional Cavern Analysis For A Hydroelectric Project in India, Using FLAC3DDocument9 pagesThree-Dimensional Cavern Analysis For A Hydroelectric Project in India, Using FLAC3Dbhandaritushar1390No ratings yet
- Pumping of Self Compacting ConcreteDocument6 pagesPumping of Self Compacting Concretewendydy6No ratings yet
- Modelado Computacional Del Flujo de ConcretoDocument14 pagesModelado Computacional Del Flujo de ConcretoAaron Arango AyalaNo ratings yet
- Unstable Two-Phase Flow Rate in Micro-Channels andDocument14 pagesUnstable Two-Phase Flow Rate in Micro-Channels andUserNo ratings yet
- Numerical Investigation of The Pressure Driven Percolation and Developed Fluid Pathways Hydro-Mechanical Lattice ModelDocument5 pagesNumerical Investigation of The Pressure Driven Percolation and Developed Fluid Pathways Hydro-Mechanical Lattice Modelshahab rahimiNo ratings yet
- Bocquet 1996Document5 pagesBocquet 1996Charan RavulaNo ratings yet
- Otc 30729 MsDocument10 pagesOtc 30729 MstingggggagtNo ratings yet
- Determination of The Optimum Crown Pillar Thickness Between OpenDocument8 pagesDetermination of The Optimum Crown Pillar Thickness Between OpenluisparedesNo ratings yet
- Pseudoelastic Cycling in Cu-Al-Be Single Crystals: Interaction With Diffusive PhenomenaDocument9 pagesPseudoelastic Cycling in Cu-Al-Be Single Crystals: Interaction With Diffusive PhenomenaEstephanie_GrassiNo ratings yet
- Nag 3167Document19 pagesNag 3167Krunal MoreyNo ratings yet
- Takahashi Full Paper - 26722Document13 pagesTakahashi Full Paper - 26722Dandi AgindaNo ratings yet
- An Experimental Study On Cyclic Loading of Piles in Sand: January 2007Document7 pagesAn Experimental Study On Cyclic Loading of Piles in Sand: January 2007Swamy ManiNo ratings yet
- Wellbore Stability MMBDocument18 pagesWellbore Stability MMBcamel 125No ratings yet
- Greg Melling, Justin Dix, Stephen Turnock, University of Southampton - Gjm1v07@noc - Soton.ac - Uk Richard Whitehouse, HR WallingfordDocument6 pagesGreg Melling, Justin Dix, Stephen Turnock, University of Southampton - Gjm1v07@noc - Soton.ac - Uk Richard Whitehouse, HR WallingfordMahmoud Abd El LateefNo ratings yet
- Matecconf Jcmme2018 02015Document8 pagesMatecconf Jcmme2018 02015CheeNo ratings yet
- Appendix HDocument11 pagesAppendix HKonsep WicaksonoNo ratings yet
- Numerical Study of Mono-Strand Anchorage Mechanism Under Service LoadDocument18 pagesNumerical Study of Mono-Strand Anchorage Mechanism Under Service LoadKarin Soldatelli BorsatoNo ratings yet
- Correlation Between Viscosity and V-Funnel FlowDocument6 pagesCorrelation Between Viscosity and V-Funnel Flowمحمد اقبالNo ratings yet
- Coloums Elactic HingeDocument13 pagesColoums Elactic HingeVanbaobbkk LeNo ratings yet
- SI 2015 For LUPINDocument23 pagesSI 2015 For LUPINr_saniosNo ratings yet
- Mechanical and Structural Behavior of Copper SubjeDocument7 pagesMechanical and Structural Behavior of Copper SubjeHari KiranNo ratings yet
- Exploris D2.8Document20 pagesExploris D2.8clarklipmanNo ratings yet
- Xiang2020 Article ExperimentalStudyOnHydro-mechaDocument15 pagesXiang2020 Article ExperimentalStudyOnHydro-mechaOctavika MaldaNo ratings yet
- NDX OlajideDocument7 pagesNDX OlajideMujtabaNo ratings yet
- SPE 122594 Well Test Analysis in Naturally Fractured Gas Condensate Reservoirs Below Dew Point PressureDocument16 pagesSPE 122594 Well Test Analysis in Naturally Fractured Gas Condensate Reservoirs Below Dew Point PressureGabriel EduardoNo ratings yet
- A Practical Way To Prepare Physical-BasedDocument13 pagesA Practical Way To Prepare Physical-BasedJuan Pablo Guzman CastroNo ratings yet
- Bearing Capacity of Partially Loaded Concrete ElemDocument9 pagesBearing Capacity of Partially Loaded Concrete ElemJuraj031No ratings yet
- SPE 153072 Production Data Analysis in Eagle Ford Shale Gas ReservoirDocument0 pagesSPE 153072 Production Data Analysis in Eagle Ford Shale Gas ReservoirFernando Montes de OcaNo ratings yet
- 01 Dea Geocontrol Celada PDFDocument10 pages01 Dea Geocontrol Celada PDFJosé AstudilloNo ratings yet
- Variational Principle of A Shock Stationed in A DuctDocument13 pagesVariational Principle of A Shock Stationed in A Ductluotianyi555No ratings yet
- 07 TLG17 MarceloLlano-Serna FinalDocument9 pages07 TLG17 MarceloLlano-Serna FinalZhenhe SongNo ratings yet
- SPE 94062 Numerical Simulation of Fully Coupled Fluid-Flow/Geomechanical Deformation in Hydraulically Fractured ReservoirsDocument5 pagesSPE 94062 Numerical Simulation of Fully Coupled Fluid-Flow/Geomechanical Deformation in Hydraulically Fractured ReservoirsAli NakhaeeNo ratings yet
- Dam Safety PDFDocument51 pagesDam Safety PDFAndyara DuarteNo ratings yet
- A Model of The Time-Dependent Interaction Between Rock and Shotcrete Support in A TunnelDocument8 pagesA Model of The Time-Dependent Interaction Between Rock and Shotcrete Support in A TunnelAndyara DuarteNo ratings yet
- Shrestha-Panthi2014 Article AnalysisOfThePlasticDeformatioDocument15 pagesShrestha-Panthi2014 Article AnalysisOfThePlasticDeformatioAndyara DuarteNo ratings yet
- Contributions To The Concept and Structural Analysis of Precast Circular Linings For Shield Driven TunnelsDocument94 pagesContributions To The Concept and Structural Analysis of Precast Circular Linings For Shield Driven TunnelsAndyara DuarteNo ratings yet
- Ground Recation Curves Non HomogeneousDocument13 pagesGround Recation Curves Non HomogeneousAndyara DuarteNo ratings yet
- Application of The Convergence-Confinement Approach To Analyze The Rock-Lining Interaction in Tunnels (Case Study: Whitemud-Creek Tunnel)Document15 pagesApplication of The Convergence-Confinement Approach To Analyze The Rock-Lining Interaction in Tunnels (Case Study: Whitemud-Creek Tunnel)Andyara DuarteNo ratings yet
- Kavvadas Monitoring and PDFDocument19 pagesKavvadas Monitoring and PDFAndyara DuarteNo ratings yet
- Numerical Study of Behavior of Anchor Plates in Clayey SoilsDocument13 pagesNumerical Study of Behavior of Anchor Plates in Clayey SoilsBilly ArlimanNo ratings yet
- Catia - Generative Part Stress AnalysisDocument154 pagesCatia - Generative Part Stress AnalysisconqurerNo ratings yet
- JBL AR Face Gel With Xanthan Gum As A Natural Thickener 2018-042Document12 pagesJBL AR Face Gel With Xanthan Gum As A Natural Thickener 2018-042Gurinder SinghNo ratings yet
- MosDocument2 pagesMosSrikant PotluriNo ratings yet
- Thesis ReportDocument187 pagesThesis ReportRediff mailNo ratings yet
- Continuum MechanicsDocument10 pagesContinuum Mechanicschristophe100% (1)
- Stress Analysis - Guide To Caesar Ii (Ver 4.10) PACKAGE: DOC No.: 29040-PI-UFR-0030 Rev.: R0Document83 pagesStress Analysis - Guide To Caesar Ii (Ver 4.10) PACKAGE: DOC No.: 29040-PI-UFR-0030 Rev.: R0FathyNo ratings yet
- Prestressed Concrete: Ishwar Chandra Vidya Sagar FOAP, AKTU, LucknowDocument53 pagesPrestressed Concrete: Ishwar Chandra Vidya Sagar FOAP, AKTU, LucknowShruti SinghNo ratings yet
- TCVN Water PipeDocument43 pagesTCVN Water PipeTuan DangNo ratings yet
- Đề tài - Analysis of Multistory Building with shear wall by using ansysDocument5 pagesĐề tài - Analysis of Multistory Building with shear wall by using ansysQuốc Quyền ĐặngNo ratings yet
- ASME NB Safety Critical Pipe Stress Analysis - Fatigue Analysis For ASME NB V11Document12 pagesASME NB Safety Critical Pipe Stress Analysis - Fatigue Analysis For ASME NB V11Jaswin BNo ratings yet
- IS: 8009 (Part I) - 1976Document42 pagesIS: 8009 (Part I) - 1976SonalMhaisalgikarNo ratings yet
- Reading Process LiteratureDocument4 pagesReading Process LiteratureCeejay ReyesNo ratings yet
- 10bt30301-Strength of MaterialsDocument1 page10bt30301-Strength of Materialsvinay MurakambattuNo ratings yet
- Assignment - Ch#23 Springs Example ProblemsDocument5 pagesAssignment - Ch#23 Springs Example ProblemsFaris AhmadNo ratings yet
- Assignment 2 Fluctuating LoadDocument3 pagesAssignment 2 Fluctuating Loadabhishek chaurasiyaNo ratings yet
- Indira Gandhi Institute of Technology, Sarang: Course Structure and Syllabus For B.ArchDocument112 pagesIndira Gandhi Institute of Technology, Sarang: Course Structure and Syllabus For B.ArchSmruti prakash BeheraNo ratings yet
- Asce 48-10 Appendix Vi (Draft)Document7 pagesAsce 48-10 Appendix Vi (Draft)alexayala5151No ratings yet
- PV Elite Saddle AnalysisDocument4 pagesPV Elite Saddle AnalysismrosNo ratings yet
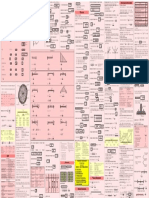
- CIVIL ROCKET? CHART Civil Ki Goli (Civil Junction)Document1 pageCIVIL ROCKET? CHART Civil Ki Goli (Civil Junction)MR. PRANAV KUMAR67% (3)
- Critical Overview of Machining Simulations in ABAQUSDocument54 pagesCritical Overview of Machining Simulations in ABAQUSSharamito AkaritoNo ratings yet
- Elastic Properties of PotatoDocument5 pagesElastic Properties of Potatopriya07rajNo ratings yet
- Physics Project On Properties of ElasticityDocument25 pagesPhysics Project On Properties of ElasticityCsa Raj50% (2)
- Design, Analysis and Development of Hydraulic Scissor LiftDocument8 pagesDesign, Analysis and Development of Hydraulic Scissor Liftmohit talrejaNo ratings yet
- Pipe Inspection Robot PDFDocument7 pagesPipe Inspection Robot PDFKarthi KeyanNo ratings yet
- Mechanics Midterm ReviewerDocument4 pagesMechanics Midterm ReviewerPoly EstherNo ratings yet
- Review in MDBDocument32 pagesReview in MDBjustinedelearthNo ratings yet
- Microgravity Fluid Mechanics 1992Document595 pagesMicrogravity Fluid Mechanics 1992carlos tNo ratings yet
- Compress EvaluateDocument23 pagesCompress EvaluateVishalDhiman100% (1)
- Chapter 15: Composites: Many Engineering Components Are CompositesDocument31 pagesChapter 15: Composites: Many Engineering Components Are CompositesbadaboyNo ratings yet