Download as pdf or txt
You might also like
- EM9980 Service 4-117248A 09-2014 UkDocument48 pagesEM9980 Service 4-117248A 09-2014 UkIrimia MarianNo ratings yet
- Linear Algerbra PDFDocument1 pageLinear Algerbra PDFBobNo ratings yet
- Geonav 4c PDFDocument136 pagesGeonav 4c PDFMassimo ArdoinoNo ratings yet
- TFY4305 Solutions Exercise Set 7 2014: Problem 5.2.12Document3 pagesTFY4305 Solutions Exercise Set 7 2014: Problem 5.2.12AaaereNo ratings yet
- Nonlinear Dynamics Mid ExamDocument9 pagesNonlinear Dynamics Mid ExamIbrahim najiNo ratings yet
- Vector Notes 2Document3 pagesVector Notes 2Sofea GhafranNo ratings yet
- Tut2 SolDocument6 pagesTut2 SolEric WangNo ratings yet
- Ch12 Graphs of Linear Equations and InequalitiesDocument22 pagesCh12 Graphs of Linear Equations and InequalitiesVera DuNo ratings yet
- SampleSolutionsTut4 7Document13 pagesSampleSolutionsTut4 7Apoorva AnshNo ratings yet
- Rotation MatrixDocument6 pagesRotation MatrixbenyfirstNo ratings yet
- LKya Xko 27 A EQG4 Ei Kyej P2 DCR LM MWKFT9 OHdem YEDocument10 pagesLKya Xko 27 A EQG4 Ei Kyej P2 DCR LM MWKFT9 OHdem YESEBASTIAN CRISTOBAL DOMINGUEZ GALARZANo ratings yet
- Theoretical 1: Solution: Conductors in Conducting LiquidDocument6 pagesTheoretical 1: Solution: Conductors in Conducting LiquidKhongor DamdinbayarNo ratings yet
- Chapter 3 Special Techniques: Z V y V X VDocument15 pagesChapter 3 Special Techniques: Z V y V X VEdo SeftiNo ratings yet
- Chapter 3 Special Techniques: Z V y V X VDocument15 pagesChapter 3 Special Techniques: Z V y V X VMuhammad Shoaib RabbaniNo ratings yet
- STPM Math FormulaDocument9 pagesSTPM Math FormulaSimPor100% (6)
- Robotics1 MidTerm 2019-20 19.11.29Document9 pagesRobotics1 MidTerm 2019-20 19.11.29Ammar BendjeddouNo ratings yet
- WS3 2 CorrDocument5 pagesWS3 2 CorrilianvegetaNo ratings yet
- Vectors Ii: 1 Vector ProductDocument22 pagesVectors Ii: 1 Vector ProductjichurrosNo ratings yet
- Di Erential Calculus in R: 3.1 Di Erentiability and DerivativesDocument52 pagesDi Erential Calculus in R: 3.1 Di Erentiability and DerivativesNguyễn Quang HuyNo ratings yet
- Adjacency Matrix NotesDocument3 pagesAdjacency Matrix NotesKavita MNo ratings yet
- School of Mathematics and Statistics MT3501 Linear Mathematics Problem Sheet I: Vector SpacesDocument15 pagesSchool of Mathematics and Statistics MT3501 Linear Mathematics Problem Sheet I: Vector Spacesvinicius kardecNo ratings yet
- EE590: Linear Algebra and Optimization Quiz 1: Time: 45 Minutes. 02-Sept 2021 Total: 40 MarksDocument29 pagesEE590: Linear Algebra and Optimization Quiz 1: Time: 45 Minutes. 02-Sept 2021 Total: 40 MarksNibha RanjanNo ratings yet
- Maths12 06Document17 pagesMaths12 06eilyaeskandarianNo ratings yet
- L21Document12 pagesL21kienkienNo ratings yet
- Paper - I - 06 - Based On Mar 2018 - SolnDocument8 pagesPaper - I - 06 - Based On Mar 2018 - SolnVishwa ShahNo ratings yet
- Non-Linear Dynamics Homework Solutions Week 4: Strogatz PortionDocument4 pagesNon-Linear Dynamics Homework Solutions Week 4: Strogatz PortionVivekNo ratings yet
- Solutions 2: Vector FieldDocument12 pagesSolutions 2: Vector FieldAnnas FauzyNo ratings yet
- Linear Algebra Practice Final ExamDocument5 pagesLinear Algebra Practice Final ExamahmedNo ratings yet
- Sec3 3 PDFDocument19 pagesSec3 3 PDFSupr RayNo ratings yet
- Linear Algebra Week 3Document51 pagesLinear Algebra Week 3Vidushi VinodNo ratings yet
- Generic Hop F BifurcationDocument25 pagesGeneric Hop F BifurcationFernandoFierroGonzalezNo ratings yet
- Sample Exam AnswersDocument2 pagesSample Exam Answerssander van laereNo ratings yet
- 2 Aolynomihls: Txterist 1.1Document9 pages2 Aolynomihls: Txterist 1.1vijay hadimaniNo ratings yet
- ALGExercises 4Document3 pagesALGExercises 4Cayuss Andrei MihăițoaiaNo ratings yet
- Math644 Chapter 1 Part1Document5 pagesMath644 Chapter 1 Part1AndyNo ratings yet
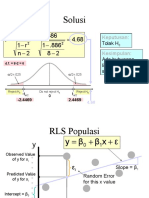
- Solusi: 4.68 2 8 .886 1 .886 2 N R 1 R TDocument4 pagesSolusi: 4.68 2 8 .886 1 .886 2 N R 1 R TwindiNo ratings yet
- Chapter 7 PDFDocument28 pagesChapter 7 PDFAnonymous 69No ratings yet
- Robotics1 21.01.12Document16 pagesRobotics1 21.01.12Ammar BendjeddouNo ratings yet
- ECSE 403 Midterm NotesDocument1 pageECSE 403 Midterm Notesddd ddNo ratings yet
- Scalars and VectorsDocument10 pagesScalars and VectorsNilar LwinNo ratings yet
- OSM ConsolEx 4A02 2a lv1Document3 pagesOSM ConsolEx 4A02 2a lv1林俊佑No ratings yet
- Final Fall2015Document19 pagesFinal Fall2015Don KonNo ratings yet
- The Properties of Determinants:: 11 22 II NNDocument15 pagesThe Properties of Determinants:: 11 22 II NNVivek SinghNo ratings yet
- Theory of Circular (Cylindrical) Waveguides: Bessel Equations and Bessel FunctionsDocument11 pagesTheory of Circular (Cylindrical) Waveguides: Bessel Equations and Bessel FunctionsKamran RaziNo ratings yet
- PARABOLA - TheoryDocument3 pagesPARABOLA - TheoryAYUSH UPADHYAYNo ratings yet
- 4 Using Gaussian Elimination: Column Space, Nullspace, Rank, Nullity, Linear Independence, Inverse MatrixDocument14 pages4 Using Gaussian Elimination: Column Space, Nullspace, Rank, Nullity, Linear Independence, Inverse Matrixmcs mNo ratings yet
- 1 The Lorentz TransformationDocument9 pages1 The Lorentz TransformationRayShefhNo ratings yet
- Cylinderical and Spherical CoordinatesDocument8 pagesCylinderical and Spherical Coordinateshassan_m2222No ratings yet
- GRE Quant NotesDocument12 pagesGRE Quant NotesLuffy DNo ratings yet
- Bifurcation 2Document11 pagesBifurcation 2Mainak ChatterjeeNo ratings yet
- Homogeneous Coordinates and TransformationDocument30 pagesHomogeneous Coordinates and Transformationantonio oliveiraNo ratings yet
- Ejercicios de Métodos de Reconstrución de Imágenes de TC: Hoja 3 - Método ARTDocument3 pagesEjercicios de Métodos de Reconstrución de Imágenes de TC: Hoja 3 - Método ARTantonioNo ratings yet
- Assignment #1: Quintos, JC Justine G. 2008-09038Document7 pagesAssignment #1: Quintos, JC Justine G. 2008-09038Jc QuintosNo ratings yet
- (MATH2111) (2013) (F) Midterm tvmq3t 59229Document7 pages(MATH2111) (2013) (F) Midterm tvmq3t 59229Bobo Lai Po HeiNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)From EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No ratings yet
- Homework Set 3 Some Solutions: Course Web Site: HTTP://WWW - Math.sfu - Ca/ Ralfw/math467Document8 pagesHomework Set 3 Some Solutions: Course Web Site: HTTP://WWW - Math.sfu - Ca/ Ralfw/math467Annas FauzyNo ratings yet
- IGCC Power Plant Second Report (Repaired)Document9 pagesIGCC Power Plant Second Report (Repaired)Annas FauzyNo ratings yet
- Solutions 2: Vector FieldDocument12 pagesSolutions 2: Vector FieldAnnas FauzyNo ratings yet
- Che614 Introduction To Hydrodynamic Stability Assignment 2 Due Date: 18 August 2014 Elementary Theory of BifurcationsDocument1 pageChe614 Introduction To Hydrodynamic Stability Assignment 2 Due Date: 18 August 2014 Elementary Theory of BifurcationsAnnas FauzyNo ratings yet
- Gas Turbine Working Principles: Bahman ZohuriDocument27 pagesGas Turbine Working Principles: Bahman ZohuriAnnas FauzyNo ratings yet
- Proposal Welcome Party 2018Document3 pagesProposal Welcome Party 2018Annas FauzyNo ratings yet
- Hydrogen Peroxide From Fuel CellDocument12 pagesHydrogen Peroxide From Fuel CellAnnas FauzyNo ratings yet
- HW 1 Fluid Mechanics DAA NCKUDocument1 pageHW 1 Fluid Mechanics DAA NCKUAnnas FauzyNo ratings yet
- Research Subject Slide (22!2!2018)Document1 pageResearch Subject Slide (22!2!2018)Annas FauzyNo ratings yet
- Vacuum Pumps and Systems For Power IndustryDocument5 pagesVacuum Pumps and Systems For Power IndustryAnnas FauzyNo ratings yet
- BC 177Document7 pagesBC 177queequeg73No ratings yet
- Relational AlgebraDocument58 pagesRelational Algebravaibhav singhNo ratings yet
- Conducting Strength Tests of Masonry Wall Panels: Standard Test Methods ForDocument6 pagesConducting Strength Tests of Masonry Wall Panels: Standard Test Methods ForOsama BashirNo ratings yet
- Batra Ring: DescriptionDocument2 pagesBatra Ring: DescriptionxzarrandikoNo ratings yet
- ARM Cortex-A Series Processors: Haoyang Lu, Zheng Lu, Yong Li, James CorteseDocument15 pagesARM Cortex-A Series Processors: Haoyang Lu, Zheng Lu, Yong Li, James CorteseNagesh SamaneNo ratings yet
- PCT - How Oil By-Products Degrade The Insulation System of A TransformerDocument4 pagesPCT - How Oil By-Products Degrade The Insulation System of A TransformerpctinformationNo ratings yet
- January 2005 QP - C1 EdexcelDocument20 pagesJanuary 2005 QP - C1 EdexcelAbid KhanNo ratings yet
- Matter Webquest: Let'S Get Started On Matter!Document5 pagesMatter Webquest: Let'S Get Started On Matter!YoNo ratings yet
- Validation Based ProtocolDocument7 pagesValidation Based ProtocolTerimaaNo ratings yet
- IC-A23 Service ManualDocument38 pagesIC-A23 Service ManualgeorgeclimaNo ratings yet
- Templates: Code Sharing (Genericity)Document9 pagesTemplates: Code Sharing (Genericity)killer crewmateNo ratings yet
- Widi Pramesia Utami - 221015200088 (Pertemuan 10)Document2 pagesWidi Pramesia Utami - 221015200088 (Pertemuan 10)kedaicemilannnNo ratings yet
- Tutorial 1 (Chapter 11a)Document2 pagesTutorial 1 (Chapter 11a)EcoliNo ratings yet
- Njord Upgrade Instructions PDFDocument9 pagesNjord Upgrade Instructions PDFvalter colleNo ratings yet
- DIP2Document80 pagesDIP2gigabyte1812No ratings yet
- Fault Code 115 Engine Magnetic Crankshaft Speed/Position Lost Both of Two Signals - Data Erratic, Intemittent, or IncorrectDocument4 pagesFault Code 115 Engine Magnetic Crankshaft Speed/Position Lost Both of Two Signals - Data Erratic, Intemittent, or IncorrectAhmedmah100% (1)
- Tremblay Et Al-2012Document14 pagesTremblay Et Al-2012jlopezarriazaNo ratings yet
- Medrano Jim Aldrin Cpe13 Activity 7Document3 pagesMedrano Jim Aldrin Cpe13 Activity 7BAROTEA Cressia Mhay G.No ratings yet
- Project Tittle Case Study Student Name Admission Number: Gad LoiDocument43 pagesProject Tittle Case Study Student Name Admission Number: Gad LoiMoses Kaswa100% (1)
- Assignment All+Sem+II+20132014Document115 pagesAssignment All+Sem+II+20132014Azlin HazwaniNo ratings yet
- Tata Ace - Tata Ace HT - Diesel Bs-IvDocument156 pagesTata Ace - Tata Ace HT - Diesel Bs-IvBhawani Copy100% (2)
- Multi-Domain Modeling of Lithium-Ion Batteries Encompassing Multi-Physics in Varied Length ScalesDocument15 pagesMulti-Domain Modeling of Lithium-Ion Batteries Encompassing Multi-Physics in Varied Length ScalesosmanalNo ratings yet
- SyllabusDocument10 pagesSyllabusroy rockNo ratings yet
- Physics 10 Bulletin Board 2Document8 pagesPhysics 10 Bulletin Board 2Mariel CondesaNo ratings yet
- 3quick Start Overview - KoBoToolbox Documentation3Document4 pages3quick Start Overview - KoBoToolbox Documentation3rangkumanNo ratings yet
- CH 20Document68 pagesCH 20BolWolNo ratings yet
- Calculate Available Heat PDFDocument14 pagesCalculate Available Heat PDFjeas grejoy andrewsNo ratings yet
- Guitar Alternate Tuning Guide PDFDocument96 pagesGuitar Alternate Tuning Guide PDFAmirpasha Fatemi100% (3)