
Bagian Bang Nugi
Bagian Bang Nugi
You might also like
- Timer Revise1Document5 pagesTimer Revise1vvanquoc1402No ratings yet
- Vaiabale Length Sub StringDocument5 pagesVaiabale Length Sub StringSourabh KumawatNo ratings yet
- BlinkDocument4 pagesBlinkBERTOLD TEPFENHARTNo ratings yet
- New Text DocumentDocument7 pagesNew Text Documentsubhradip.durbintechNo ratings yet
- SubmitDocument10 pagesSubmitJahanara suchiNo ratings yet
- Programa 2Document4 pagesPrograma 2FELIPENo ratings yet
- MainDocument9 pagesMainShyam KumarNo ratings yet
- ADC ModoDMADocument13 pagesADC ModoDMAEmanuel CrespoNo ratings yet
- I0718001 - Abraham Babtistio - SBM - ButtonDocument11 pagesI0718001 - Abraham Babtistio - SBM - ButtonIlham GilangNo ratings yet
- Gyroscope LED Controller STM32F407 DiscoveryDocument21 pagesGyroscope LED Controller STM32F407 DiscoveryAndrei GeorgeNo ratings yet
- EMG EKG Code For ARDUINO SHIELDDocument4 pagesEMG EKG Code For ARDUINO SHIELDbeniamin Alexandru100% (1)
- MINI PROJECT SYNOPSIS REPORT (Notes)Document13 pagesMINI PROJECT SYNOPSIS REPORT (Notes)nishant.bawane.mtech2022No ratings yet
- EkrannDocument6 pagesEkrannBubbleNo ratings yet
- LCD Interfacing CodeDocument5 pagesLCD Interfacing Codedatapot465No ratings yet
- BalajeeSrinivasan095 LabPraticalDocument5 pagesBalajeeSrinivasan095 LabPraticalItsBalaTimeNo ratings yet
- Stepper Acceleration FreertosDocument9 pagesStepper Acceleration FreertosSourabh KumawatNo ratings yet
- MainDocument8 pagesMainEvelina JimenezNo ratings yet
- USER CODE BEGIN HeaderDocument16 pagesUSER CODE BEGIN HeaderEya ToumiNo ratings yet
- Lab FreeRTOSDocument11 pagesLab FreeRTOSImmortal WizardNo ratings yet
- HbridgeDocument8 pagesHbridgeomeruslu1642No ratings yet
- Baocaotuan 123Document15 pagesBaocaotuan 123Thuận QuangNo ratings yet
- CodecuDocument6 pagesCodecuLinhChi HPNo ratings yet
- Keyboard and Watchdog Program Examples: Application NoteDocument20 pagesKeyboard and Watchdog Program Examples: Application NotecuongvktNo ratings yet
- Unor3smbus 2.inoDocument6 pagesUnor3smbus 2.inoM. Randy AswinNo ratings yet
- DECODING HT6P20 WITH Attachinterrupt Arduino Forum PDFDocument6 pagesDECODING HT6P20 WITH Attachinterrupt Arduino Forum PDFbetodias30No ratings yet
- Pes1ug20ee056 - DSP - Assignment 10042023Document11 pagesPes1ug20ee056 - DSP - Assignment 10042023The Lord Of Cubing.No ratings yet
- TempDocument17 pagesTempSourabh KumawatNo ratings yet
- Sample Code For SHT21: Supporting Communication SoftwareDocument14 pagesSample Code For SHT21: Supporting Communication SoftwareMaiDungNo ratings yet
- Experiment No 1 GLCDDocument18 pagesExperiment No 1 GLCDDakshata WaghNo ratings yet
- Lab0 CDocument5 pagesLab0 CJorge Cruz Mancilla100% (1)
- CodenghiencuuDocument7 pagesCodenghiencuuNhat NguyenNo ratings yet
- SpihsmDocument26 pagesSpihsmapi-438120791No ratings yet
- VI Du Pic Dung CDocument48 pagesVI Du Pic Dung Cphillipcarter800100% (2)
- Code OkDocument6 pagesCode OkTấn Phát Vũ BùiNo ratings yet
- MotorencodersDocument9 pagesMotorencodersapi-398062839100% (1)
- Main CDocument10 pagesMain CTarcísio Souza de MeloNo ratings yet
- Program Frekuensi CounterDocument3 pagesProgram Frekuensi CounterM Surya PrayogaNo ratings yet
- STM32 Tutorial 03 - UART Communication Using HAL (And FreeRTOS)Document5 pagesSTM32 Tutorial 03 - UART Communication Using HAL (And FreeRTOS)AnjaVeselinovicNo ratings yet
- DECODING HT6P20 WITH Attachinterrupt - Arduino ForumDocument6 pagesDECODING HT6P20 WITH Attachinterrupt - Arduino ForumRhadsNo ratings yet
- LCD Interfacing With ATmega32Document6 pagesLCD Interfacing With ATmega32nandoclasic100% (2)
- Antenna AnalyzerDocument19 pagesAntenna Analyzermarista NurdianaNo ratings yet
- Main CPPDocument52 pagesMain CPPNarasimha ReddyNo ratings yet
- Pid Arduino UnoDocument3 pagesPid Arduino UnoabuihsanrafiNo ratings yet
- AccDocument34 pagesAccScribdfavNo ratings yet
- Sample Code Humidity Sensor SHTXXDocument7 pagesSample Code Humidity Sensor SHTXXnooriusefNo ratings yet
- #Include "Main.H": Systemclock - Config Periphcommonclock - Config MX - Gpio - InitDocument4 pages#Include "Main.H": Systemclock - Config Periphcommonclock - Config MX - Gpio - InitalleximsNo ratings yet
- #Include "LPC17xx.h": #Ifndef #DefineDocument12 pages#Include "LPC17xx.h": #Ifndef #DefineGera CollanteNo ratings yet
- Lanjutan 521Document9 pagesLanjutan 521Ricky Si MadaraNo ratings yet
- Microcontroller Program DesignDocument4 pagesMicrocontroller Program DesignAlvin SabadoNo ratings yet
- OsprojDocument4 pagesOsprojSachin ItgampalliNo ratings yet
- Develop Routine of TF-Luna in Arduino: Step 1: Hardware ConnectionDocument6 pagesDevelop Routine of TF-Luna in Arduino: Step 1: Hardware ConnectionSumitra TNo ratings yet
- Báo Cáo Thực Tập Vi Xử Lý Tuần 4-6Document16 pagesBáo Cáo Thực Tập Vi Xử Lý Tuần 4-6maodinhhuan18032003No ratings yet
- LCD RS232 InterfaceDocument2,505 pagesLCD RS232 InterfaceJuan Gil RocaNo ratings yet
- Tutorial 1 (Blink LED)Document5 pagesTutorial 1 (Blink LED)M.SadatNo ratings yet
- Standard Firmata EthernetDocument34 pagesStandard Firmata Ethernetsoo chiNo ratings yet
- ADXL335Document7 pagesADXL335ZidNa Munif MuhammadNo ratings yet
- I2c EEPROM FULL CODEDocument24 pagesI2c EEPROM FULL CODESumathi AnandNo ratings yet
- Audio HW Old.cDocument36 pagesAudio HW Old.cAnu DixitNo ratings yet
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemFrom EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Q3 Science 5 Module 2Document22 pagesQ3 Science 5 Module 2Cecilia Guevarra Dumlao100% (2)
- Datasheet - Module Temperature Sensor VT200Document2 pagesDatasheet - Module Temperature Sensor VT200Eisac SagimanNo ratings yet
- Simply ElectronicsDocument107 pagesSimply Electronicschafic WEISSNo ratings yet
- Omega Electronics-Jaipur Mobile Robotics: Industrial Training - 2009Document52 pagesOmega Electronics-Jaipur Mobile Robotics: Industrial Training - 2009Raj K. GoyalNo ratings yet
- Current ElectricityDocument10 pagesCurrent ElectricityClemence TafitiNo ratings yet
- BRAHMA Control de Llama MPIDocument5 pagesBRAHMA Control de Llama MPIAriel SantambrosioNo ratings yet
- DSP Lab Experiment 09 - Group 02 - eDocument11 pagesDSP Lab Experiment 09 - Group 02 - eSayed MahmudNo ratings yet
- Specification: Constant Current Discharge Characteristics: A (25)Document2 pagesSpecification: Constant Current Discharge Characteristics: A (25)Macbelercorp SacNo ratings yet
- Measurement PyqDocument99 pagesMeasurement PyqAshutosh ManglikNo ratings yet
- Hacked 3Document6 pagesHacked 3Inzi AsadNo ratings yet
- Scheme of D.C. Sputtering: StartDocument8 pagesScheme of D.C. Sputtering: StartJawahar DasNo ratings yet
- Proficonn PB102Document3 pagesProficonn PB102cutoNo ratings yet
- Lesson Exemplar Science 8 WEEK 8Document108 pagesLesson Exemplar Science 8 WEEK 8Richard F. TalameraNo ratings yet
- Worthington Instruction Book PCI07 enDocument28 pagesWorthington Instruction Book PCI07 ensebastian100% (8)
- Delta and y Conversion With Three Phase SystemDocument18 pagesDelta and y Conversion With Three Phase Systemapi-247714257No ratings yet
- Application Examples of Basic Commands Application #4: Drilling Control OperationDocument10 pagesApplication Examples of Basic Commands Application #4: Drilling Control OperationDjokataNo ratings yet
- Ips Led Monitor (Led Monitor ) : Owner's ManualDocument25 pagesIps Led Monitor (Led Monitor ) : Owner's ManualsalveruNo ratings yet
- ACR Nauticast™-B: The Science of SurvivalDocument2 pagesACR Nauticast™-B: The Science of SurvivalLac TranNo ratings yet
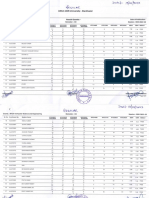
- Result Gazette Regular ODD 22 23 3rd Semester BTech Computer Science and EngineeringDocument6 pagesResult Gazette Regular ODD 22 23 3rd Semester BTech Computer Science and EngineeringAbhishek BhaduriNo ratings yet
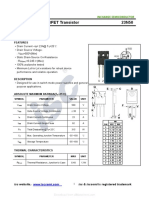
- Isc N-Channel MOSFET Transistor 23N50: FeaturesDocument2 pagesIsc N-Channel MOSFET Transistor 23N50: FeaturesReymondJosuéArgüelloRojasNo ratings yet
- lm338 DatasheetDocument31 pageslm338 DatasheetgabozauNo ratings yet
- Schools Division of Parañaque City Tvl-Electrical Installation and Maintenance 11 Third Quarter Week 5 & Week 6 Install Wire Ways and Cable TraysDocument5 pagesSchools Division of Parañaque City Tvl-Electrical Installation and Maintenance 11 Third Quarter Week 5 & Week 6 Install Wire Ways and Cable TraysJdkrkejNo ratings yet
- Phase 2Document8 pagesPhase 2Eshan SNo ratings yet
- Cardinal Alaris-GW - Service ManualDocument81 pagesCardinal Alaris-GW - Service ManualassistenciaNo ratings yet
- Siemens Air Velocity Sensor QVM62.1Document6 pagesSiemens Air Velocity Sensor QVM62.1kojekudeNo ratings yet
- CC 2348Document34 pagesCC 2348Kailtech Lab IndoreNo ratings yet
- Subject Page No.: Premium SoundDocument2 pagesSubject Page No.: Premium Soundvette512No ratings yet
- (The International Series in Engineering and Computer Science 874) Kathleen Philips, Arthur H. M. van Roermund (auth.) - ΣΔ A - D CONVERSION FOR SIGNAL CONDITIONING-Springer Netherlands (2006)Document229 pages(The International Series in Engineering and Computer Science 874) Kathleen Philips, Arthur H. M. van Roermund (auth.) - ΣΔ A - D CONVERSION FOR SIGNAL CONDITIONING-Springer Netherlands (2006)ndanghaoNo ratings yet
- Lifi ReportDocument73 pagesLifi Reporttafiasacademy maduraiNo ratings yet
- FXN32N55T: General Description FeaturesDocument5 pagesFXN32N55T: General Description Featurescharly36No ratings yet























































































Download as docx, pdf, or txt
You might also like
- Timer Revise1Document5 pagesTimer Revise1vvanquoc1402No ratings yet
- Vaiabale Length Sub StringDocument5 pagesVaiabale Length Sub StringSourabh KumawatNo ratings yet
- BlinkDocument4 pagesBlinkBERTOLD TEPFENHARTNo ratings yet
- New Text DocumentDocument7 pagesNew Text Documentsubhradip.durbintechNo ratings yet
- SubmitDocument10 pagesSubmitJahanara suchiNo ratings yet
- Programa 2Document4 pagesPrograma 2FELIPENo ratings yet
- MainDocument9 pagesMainShyam KumarNo ratings yet
- ADC ModoDMADocument13 pagesADC ModoDMAEmanuel CrespoNo ratings yet
- I0718001 - Abraham Babtistio - SBM - ButtonDocument11 pagesI0718001 - Abraham Babtistio - SBM - ButtonIlham GilangNo ratings yet
- Gyroscope LED Controller STM32F407 DiscoveryDocument21 pagesGyroscope LED Controller STM32F407 DiscoveryAndrei GeorgeNo ratings yet
- EMG EKG Code For ARDUINO SHIELDDocument4 pagesEMG EKG Code For ARDUINO SHIELDbeniamin Alexandru100% (1)
- MINI PROJECT SYNOPSIS REPORT (Notes)Document13 pagesMINI PROJECT SYNOPSIS REPORT (Notes)nishant.bawane.mtech2022No ratings yet
- EkrannDocument6 pagesEkrannBubbleNo ratings yet
- LCD Interfacing CodeDocument5 pagesLCD Interfacing Codedatapot465No ratings yet
- BalajeeSrinivasan095 LabPraticalDocument5 pagesBalajeeSrinivasan095 LabPraticalItsBalaTimeNo ratings yet
- Stepper Acceleration FreertosDocument9 pagesStepper Acceleration FreertosSourabh KumawatNo ratings yet
- MainDocument8 pagesMainEvelina JimenezNo ratings yet
- USER CODE BEGIN HeaderDocument16 pagesUSER CODE BEGIN HeaderEya ToumiNo ratings yet
- Lab FreeRTOSDocument11 pagesLab FreeRTOSImmortal WizardNo ratings yet
- HbridgeDocument8 pagesHbridgeomeruslu1642No ratings yet
- Baocaotuan 123Document15 pagesBaocaotuan 123Thuận QuangNo ratings yet
- CodecuDocument6 pagesCodecuLinhChi HPNo ratings yet
- Keyboard and Watchdog Program Examples: Application NoteDocument20 pagesKeyboard and Watchdog Program Examples: Application NotecuongvktNo ratings yet
- Unor3smbus 2.inoDocument6 pagesUnor3smbus 2.inoM. Randy AswinNo ratings yet
- DECODING HT6P20 WITH Attachinterrupt Arduino Forum PDFDocument6 pagesDECODING HT6P20 WITH Attachinterrupt Arduino Forum PDFbetodias30No ratings yet
- Pes1ug20ee056 - DSP - Assignment 10042023Document11 pagesPes1ug20ee056 - DSP - Assignment 10042023The Lord Of Cubing.No ratings yet
- TempDocument17 pagesTempSourabh KumawatNo ratings yet
- Sample Code For SHT21: Supporting Communication SoftwareDocument14 pagesSample Code For SHT21: Supporting Communication SoftwareMaiDungNo ratings yet
- Experiment No 1 GLCDDocument18 pagesExperiment No 1 GLCDDakshata WaghNo ratings yet
- Lab0 CDocument5 pagesLab0 CJorge Cruz Mancilla100% (1)
- CodenghiencuuDocument7 pagesCodenghiencuuNhat NguyenNo ratings yet
- SpihsmDocument26 pagesSpihsmapi-438120791No ratings yet
- VI Du Pic Dung CDocument48 pagesVI Du Pic Dung Cphillipcarter800100% (2)
- Code OkDocument6 pagesCode OkTấn Phát Vũ BùiNo ratings yet
- MotorencodersDocument9 pagesMotorencodersapi-398062839100% (1)
- Main CDocument10 pagesMain CTarcísio Souza de MeloNo ratings yet
- Program Frekuensi CounterDocument3 pagesProgram Frekuensi CounterM Surya PrayogaNo ratings yet
- STM32 Tutorial 03 - UART Communication Using HAL (And FreeRTOS)Document5 pagesSTM32 Tutorial 03 - UART Communication Using HAL (And FreeRTOS)AnjaVeselinovicNo ratings yet
- DECODING HT6P20 WITH Attachinterrupt - Arduino ForumDocument6 pagesDECODING HT6P20 WITH Attachinterrupt - Arduino ForumRhadsNo ratings yet
- LCD Interfacing With ATmega32Document6 pagesLCD Interfacing With ATmega32nandoclasic100% (2)
- Antenna AnalyzerDocument19 pagesAntenna Analyzermarista NurdianaNo ratings yet
- Main CPPDocument52 pagesMain CPPNarasimha ReddyNo ratings yet
- Pid Arduino UnoDocument3 pagesPid Arduino UnoabuihsanrafiNo ratings yet
- AccDocument34 pagesAccScribdfavNo ratings yet
- Sample Code Humidity Sensor SHTXXDocument7 pagesSample Code Humidity Sensor SHTXXnooriusefNo ratings yet
- #Include "Main.H": Systemclock - Config Periphcommonclock - Config MX - Gpio - InitDocument4 pages#Include "Main.H": Systemclock - Config Periphcommonclock - Config MX - Gpio - InitalleximsNo ratings yet
- #Include "LPC17xx.h": #Ifndef #DefineDocument12 pages#Include "LPC17xx.h": #Ifndef #DefineGera CollanteNo ratings yet
- Lanjutan 521Document9 pagesLanjutan 521Ricky Si MadaraNo ratings yet
- Microcontroller Program DesignDocument4 pagesMicrocontroller Program DesignAlvin SabadoNo ratings yet
- OsprojDocument4 pagesOsprojSachin ItgampalliNo ratings yet
- Develop Routine of TF-Luna in Arduino: Step 1: Hardware ConnectionDocument6 pagesDevelop Routine of TF-Luna in Arduino: Step 1: Hardware ConnectionSumitra TNo ratings yet
- Báo Cáo Thực Tập Vi Xử Lý Tuần 4-6Document16 pagesBáo Cáo Thực Tập Vi Xử Lý Tuần 4-6maodinhhuan18032003No ratings yet
- LCD RS232 InterfaceDocument2,505 pagesLCD RS232 InterfaceJuan Gil RocaNo ratings yet
- Tutorial 1 (Blink LED)Document5 pagesTutorial 1 (Blink LED)M.SadatNo ratings yet
- Standard Firmata EthernetDocument34 pagesStandard Firmata Ethernetsoo chiNo ratings yet
- ADXL335Document7 pagesADXL335ZidNa Munif MuhammadNo ratings yet
- I2c EEPROM FULL CODEDocument24 pagesI2c EEPROM FULL CODESumathi AnandNo ratings yet
- Audio HW Old.cDocument36 pagesAudio HW Old.cAnu DixitNo ratings yet
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemFrom EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Q3 Science 5 Module 2Document22 pagesQ3 Science 5 Module 2Cecilia Guevarra Dumlao100% (2)
- Datasheet - Module Temperature Sensor VT200Document2 pagesDatasheet - Module Temperature Sensor VT200Eisac SagimanNo ratings yet
- Simply ElectronicsDocument107 pagesSimply Electronicschafic WEISSNo ratings yet
- Omega Electronics-Jaipur Mobile Robotics: Industrial Training - 2009Document52 pagesOmega Electronics-Jaipur Mobile Robotics: Industrial Training - 2009Raj K. GoyalNo ratings yet
- Current ElectricityDocument10 pagesCurrent ElectricityClemence TafitiNo ratings yet
- BRAHMA Control de Llama MPIDocument5 pagesBRAHMA Control de Llama MPIAriel SantambrosioNo ratings yet
- DSP Lab Experiment 09 - Group 02 - eDocument11 pagesDSP Lab Experiment 09 - Group 02 - eSayed MahmudNo ratings yet
- Specification: Constant Current Discharge Characteristics: A (25)Document2 pagesSpecification: Constant Current Discharge Characteristics: A (25)Macbelercorp SacNo ratings yet
- Measurement PyqDocument99 pagesMeasurement PyqAshutosh ManglikNo ratings yet
- Hacked 3Document6 pagesHacked 3Inzi AsadNo ratings yet
- Scheme of D.C. Sputtering: StartDocument8 pagesScheme of D.C. Sputtering: StartJawahar DasNo ratings yet
- Proficonn PB102Document3 pagesProficonn PB102cutoNo ratings yet
- Lesson Exemplar Science 8 WEEK 8Document108 pagesLesson Exemplar Science 8 WEEK 8Richard F. TalameraNo ratings yet
- Worthington Instruction Book PCI07 enDocument28 pagesWorthington Instruction Book PCI07 ensebastian100% (8)
- Delta and y Conversion With Three Phase SystemDocument18 pagesDelta and y Conversion With Three Phase Systemapi-247714257No ratings yet
- Application Examples of Basic Commands Application #4: Drilling Control OperationDocument10 pagesApplication Examples of Basic Commands Application #4: Drilling Control OperationDjokataNo ratings yet
- Ips Led Monitor (Led Monitor ) : Owner's ManualDocument25 pagesIps Led Monitor (Led Monitor ) : Owner's ManualsalveruNo ratings yet
- ACR Nauticast™-B: The Science of SurvivalDocument2 pagesACR Nauticast™-B: The Science of SurvivalLac TranNo ratings yet
- Result Gazette Regular ODD 22 23 3rd Semester BTech Computer Science and EngineeringDocument6 pagesResult Gazette Regular ODD 22 23 3rd Semester BTech Computer Science and EngineeringAbhishek BhaduriNo ratings yet
- Isc N-Channel MOSFET Transistor 23N50: FeaturesDocument2 pagesIsc N-Channel MOSFET Transistor 23N50: FeaturesReymondJosuéArgüelloRojasNo ratings yet
- lm338 DatasheetDocument31 pageslm338 DatasheetgabozauNo ratings yet
- Schools Division of Parañaque City Tvl-Electrical Installation and Maintenance 11 Third Quarter Week 5 & Week 6 Install Wire Ways and Cable TraysDocument5 pagesSchools Division of Parañaque City Tvl-Electrical Installation and Maintenance 11 Third Quarter Week 5 & Week 6 Install Wire Ways and Cable TraysJdkrkejNo ratings yet
- Phase 2Document8 pagesPhase 2Eshan SNo ratings yet
- Cardinal Alaris-GW - Service ManualDocument81 pagesCardinal Alaris-GW - Service ManualassistenciaNo ratings yet
- Siemens Air Velocity Sensor QVM62.1Document6 pagesSiemens Air Velocity Sensor QVM62.1kojekudeNo ratings yet
- CC 2348Document34 pagesCC 2348Kailtech Lab IndoreNo ratings yet
- Subject Page No.: Premium SoundDocument2 pagesSubject Page No.: Premium Soundvette512No ratings yet
- (The International Series in Engineering and Computer Science 874) Kathleen Philips, Arthur H. M. van Roermund (auth.) - ΣΔ A - D CONVERSION FOR SIGNAL CONDITIONING-Springer Netherlands (2006)Document229 pages(The International Series in Engineering and Computer Science 874) Kathleen Philips, Arthur H. M. van Roermund (auth.) - ΣΔ A - D CONVERSION FOR SIGNAL CONDITIONING-Springer Netherlands (2006)ndanghaoNo ratings yet
- Lifi ReportDocument73 pagesLifi Reporttafiasacademy maduraiNo ratings yet
- FXN32N55T: General Description FeaturesDocument5 pagesFXN32N55T: General Description Featurescharly36No ratings yet