Download as docx, pdf, or txt
You might also like
- Solutions: Solutions Manual For Mechanical Vibration Analysis Uncertainties and Control 3Rd Edition BenaroyaDocument81 pagesSolutions: Solutions Manual For Mechanical Vibration Analysis Uncertainties and Control 3Rd Edition BenaroyaANTONIO RODRIGUESNo ratings yet
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Diseño de Maquinas Juvinall PDFDocument1,548 pagesDiseño de Maquinas Juvinall PDFjkl012100% (1)
- User (COMPANY NAME) (Company Address)Document14 pagesUser (COMPANY NAME) (Company Address)Nidhin KakkanattuNo ratings yet
- Advanced Thermal and Fluid Engineering: (Email Address)Document16 pagesAdvanced Thermal and Fluid Engineering: (Email Address)Nidhin KakkanattuNo ratings yet
- Ch. 2Document6 pagesCh. 2Sandy ShohdyNo ratings yet
- Lecture 4 NotesDocument36 pagesLecture 4 Notesahmed11 engyemenNo ratings yet
- Mathematical Modeling of Systems: TextbookDocument3 pagesMathematical Modeling of Systems: TextbookramNo ratings yet
- Me 2401 Mechatronics: Unit Iii System Models and ControllersDocument46 pagesMe 2401 Mechatronics: Unit Iii System Models and ControllersPANNERSELVAM50% (2)
- Rasheef Maths AssignmantDocument10 pagesRasheef Maths AssignmantMohamed SanoosNo ratings yet
- Advanced Thermal and Fluid EngineeringDocument16 pagesAdvanced Thermal and Fluid EngineeringNidhin KakkanattuNo ratings yet
- Introduction To Basic Principles of Fluid MechanicsDocument11 pagesIntroduction To Basic Principles of Fluid MechanicsNoureldin YosriNo ratings yet
- Mathematical Model: Topic Learning OutcomesDocument23 pagesMathematical Model: Topic Learning OutcomesAmirul Shahrin991109No ratings yet
- Physics For EngineersDocument14 pagesPhysics For EngineersEmilNo ratings yet
- Introduction To Fluid DynamicsDocument76 pagesIntroduction To Fluid DynamicsRajrdb100% (1)
- Physics 5Document20 pagesPhysics 5DaNy3lMatheoNo ratings yet
- Lecture 3 - Conservation Equations Applied Computational Fluid DynamicsDocument33 pagesLecture 3 - Conservation Equations Applied Computational Fluid DynamicsPragadeesh MohanNo ratings yet
- PHYS 102 Questions On Dimensional Analysis 2024 - 014114Document7 pagesPHYS 102 Questions On Dimensional Analysis 2024 - 014114mavrickgsniusNo ratings yet
- A Historical and Physical Derivation of The Measurement of TimeDocument22 pagesA Historical and Physical Derivation of The Measurement of TimeIan BeardsleyNo ratings yet
- Mechanics 3 Revision NotesDocument45 pagesMechanics 3 Revision NotesDexter FungNo ratings yet
- 4 Engleza Oscilatii ArmoniceDocument11 pages4 Engleza Oscilatii ArmoniceMIRCEA-PAUL TĂNĂSESCUNo ratings yet
- Lecture Notes On PHY 101Document7 pagesLecture Notes On PHY 101Ezenwaka Eucharia100% (2)
- Fluid MechanicsDocument41 pagesFluid MechanicsRian SteveNo ratings yet
- Hard or Physical SystemsDocument33 pagesHard or Physical Systemsadityakashyap123No ratings yet
- Aircraft Modes of VibrationDocument7 pagesAircraft Modes of VibrationmgskumarNo ratings yet
- Rigid Body DynamicsDocument55 pagesRigid Body DynamicsKenn ConsueloNo ratings yet
- Molecular Dynamics SimulationDocument49 pagesMolecular Dynamics SimulationredaelwanNo ratings yet
- A Simple Mathematical Model: PRESENTED BY: Ignacio, Carl Jhon Steven MDocument15 pagesA Simple Mathematical Model: PRESENTED BY: Ignacio, Carl Jhon Steven MAnonymous UbgxbiyPXPNo ratings yet
- Important Questions Physics CLASS 11Document4 pagesImportant Questions Physics CLASS 11Palak AgarwalNo ratings yet
- Acceleration: Sunil Kumar SinghDocument6 pagesAcceleration: Sunil Kumar SinghphultushiblsNo ratings yet
- Theoretical Problems Problem 1Document16 pagesTheoretical Problems Problem 1chatuusumitavaNo ratings yet
- MM302 1 Lecture Note 1Document18 pagesMM302 1 Lecture Note 1EmreNo ratings yet
- Lecture2 - CFD - Course - Governing Equations (Compatibility Mode) PDFDocument132 pagesLecture2 - CFD - Course - Governing Equations (Compatibility Mode) PDFvibhor28No ratings yet
- Dynamic Response of Measurement Systems: ME231 Measurements Laboratory Spring 1999Document19 pagesDynamic Response of Measurement Systems: ME231 Measurements Laboratory Spring 1999Giriraj HedaNo ratings yet
- PhysicsDocument12 pagesPhysicseka123No ratings yet
- Content Marketed & Distributed By: Gupta Classes For Any Help Contact: 9953168795, 9268789880Document6 pagesContent Marketed & Distributed By: Gupta Classes For Any Help Contact: 9953168795, 9268789880Vibha SethiNo ratings yet
- HAY - Aggregation in Colloids and AerosolsDocument282 pagesHAY - Aggregation in Colloids and AerosolsTrần Thu ThảoNo ratings yet
- ViBrasi InmanDocument67 pagesViBrasi InmanAnonymous RJtBkn100% (1)
- Lecture 2Document12 pagesLecture 2Syed Hussain Akbar MosviNo ratings yet
- Differential Equations For Fluid MotionDocument29 pagesDifferential Equations For Fluid MotionLameuneNo ratings yet
- Physical Quantities and UnitsDocument5 pagesPhysical Quantities and UnitsLaud FumhandaNo ratings yet
- Chapter 3-Thermodynamics FinalDocument20 pagesChapter 3-Thermodynamics FinalMURALIGOCAM_29070605No ratings yet
- System DynamicsDocument18 pagesSystem DynamicsGthulasi78No ratings yet
- IME2 Moment of InertiaDocument6 pagesIME2 Moment of Inertiavivekverma390No ratings yet
- Dynamic SystemDocument28 pagesDynamic SystemA - STARNo ratings yet
- Vibration Dynamics PDFDocument41 pagesVibration Dynamics PDFvbhvmht09100% (1)
- Hydraulics I Lecture 13 27sep2022Document3 pagesHydraulics I Lecture 13 27sep2022AMERICA FABIOLA MENDOZA ROMERONo ratings yet
- Basics of Vibration DynamicsDocument41 pagesBasics of Vibration DynamicshahahaNo ratings yet
- Shear Flow: 3.1 Transport Processes and Transport CoefficientsDocument15 pagesShear Flow: 3.1 Transport Processes and Transport CoefficientsRadha Krishnan RNo ratings yet
- Integral Relation of Fluid FlowDocument36 pagesIntegral Relation of Fluid FlowGashaw MinayeNo ratings yet
- Physics Formulas and ConceptsDocument23 pagesPhysics Formulas and Conceptschand7790No ratings yet
- L06 Fluid Mechanics For Mechanical Engineers Integral Analysis of Fluid Flow FlatDocument23 pagesL06 Fluid Mechanics For Mechanical Engineers Integral Analysis of Fluid Flow Flatdnzed35No ratings yet
- ME1402 Mechatronics Unit - 3Document71 pagesME1402 Mechatronics Unit - 3Sandheep Radhakrishnan100% (7)
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- User (COMPANY NAME) (Company Address)Document14 pagesUser (COMPANY NAME) (Company Address)Nidhin KakkanattuNo ratings yet
- Advanced Thermal and Fluid EngineeringDocument16 pagesAdvanced Thermal and Fluid EngineeringNidhin KakkanattuNo ratings yet
- EGA-214 Supplemental Assessment Design Brief (2018-2019)Document9 pagesEGA-214 Supplemental Assessment Design Brief (2018-2019)Nidhin KakkanattuNo ratings yet
- Advanced Thermal and Fluid Engineering: (Email Address)Document16 pagesAdvanced Thermal and Fluid Engineering: (Email Address)Nidhin KakkanattuNo ratings yet
- HOMER Help Manual: Table of ContentsDocument241 pagesHOMER Help Manual: Table of ContentsNidhin KakkanattuNo ratings yet
- Design Optimisation of A Flat Finned Heat ExchangerDocument15 pagesDesign Optimisation of A Flat Finned Heat ExchangerNidhin KakkanattuNo ratings yet
- Inorganic Photovoltaics - Planar and Nanostructured DevicesDocument111 pagesInorganic Photovoltaics - Planar and Nanostructured DevicesUdai SinghNo ratings yet
- AA200 CH 06 The Conservation Equations CantwellDocument38 pagesAA200 CH 06 The Conservation Equations CantwellbhargavNo ratings yet
- Brochure PolymegDocument27 pagesBrochure PolymegÖzlem YılmazNo ratings yet
- Shape-Memory Alloy PDFDocument9 pagesShape-Memory Alloy PDFletter_ashish4444No ratings yet
- 03 Driving Force For SolidificationDocument8 pages03 Driving Force For SolidificationhsemargNo ratings yet
- 1987.effects of Reynolds Number and A Low Intensity Freestream Turbulence On The Flow Around A Circular Cylinder - NorbergDocument55 pages1987.effects of Reynolds Number and A Low Intensity Freestream Turbulence On The Flow Around A Circular Cylinder - NorbergRaul KörralesNo ratings yet
- Exergy Analysis in ProSimPlus SimulationDocument22 pagesExergy Analysis in ProSimPlus Simulationneurolepsia3790No ratings yet
- Mini ProjectDocument13 pagesMini Project20-119 KATRAVATH HARINo ratings yet
- Mse230 E2 Practice SolDocument20 pagesMse230 E2 Practice SolAkshit PandeyNo ratings yet
- H218c Notes Tutorial - A Primer of Quantum MechanicsDocument21 pagesH218c Notes Tutorial - A Primer of Quantum MechanicsSeanNo ratings yet
- ProjectDocument10 pagesProjectsahirNo ratings yet
- Alfgrid G30-301Document1 pageAlfgrid G30-301Aladin Abrash0% (1)
- Blue LedDocument3 pagesBlue LedKrishnaNo ratings yet
- New Version of Mehta Concrete PDFDocument1,315 pagesNew Version of Mehta Concrete PDFsrinivasan venkatraman100% (2)
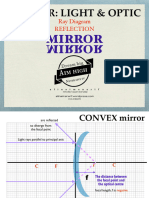
- Ray Diagram (MIRROR)Document11 pagesRay Diagram (MIRROR)Haziq AimanNo ratings yet
- ThermoDocument5 pagesThermoTerry Clarice DecatoriaNo ratings yet
- Lesson 1 - Fundamental Concepts and Definitions PDFDocument58 pagesLesson 1 - Fundamental Concepts and Definitions PDFJhon Lhoyd CorpuzNo ratings yet
- SSHC With One Capacitor For Piezoelectric Energy HarvestingDocument4 pagesSSHC With One Capacitor For Piezoelectric Energy HarvestingHafeez KtNo ratings yet
- Table of ContentsDocument18 pagesTable of ContentsRoha JavedNo ratings yet
- Sa1 FrameDocument51 pagesSa1 FrameetanNo ratings yet
- Selectrode: High Deposition 316L Stainless Steel International ClassificationsDocument2 pagesSelectrode: High Deposition 316L Stainless Steel International ClassificationsMohamed AdelNo ratings yet
- Nanoparticles Report Final Draft 111Document23 pagesNanoparticles Report Final Draft 111Hrishikesh ShejulNo ratings yet
- Ebook Chemistry Structure and Properties 2Nd Edition Tro Test Bank Full Chapter PDFDocument45 pagesEbook Chemistry Structure and Properties 2Nd Edition Tro Test Bank Full Chapter PDFjosephrodriguez04121993gbm100% (14)
- Report of Sub-Station VisitDocument15 pagesReport of Sub-Station VisitAshfaque SalzNo ratings yet
- Compressive Test For PlasticDocument7 pagesCompressive Test For PlasticNebyat YazachewNo ratings yet
- Flash Tank PDFDocument19 pagesFlash Tank PDFMufita RamadhinaNo ratings yet
- Vascular Wall Shear StressDocument7 pagesVascular Wall Shear Stressvirtualpop3No ratings yet
- 44CDocument9 pages44CTarunNo ratings yet