
The Smart Image Recognition Mechanism For Crop Harvesting System in Intelligent Agriculture
The Smart Image Recognition Mechanism For Crop Harvesting System in Intelligent Agriculture
You might also like
- A350 Cocpkit Preparation - V03TM1400232 - v1Document17 pagesA350 Cocpkit Preparation - V03TM1400232 - v1Iglesia Puente Largo Doha100% (6)
- Ebook - Drones in Agriculture - Seeing Beyond The Surface With Smart FarmingDocument39 pagesEbook - Drones in Agriculture - Seeing Beyond The Surface With Smart FarmingSyahrul KamilNo ratings yet
- School Subjects and The Time - Multiple Choice QuestionsDocument1 pageSchool Subjects and The Time - Multiple Choice QuestionsArroyoCala100% (1)
- Writing A Research ProposalDocument3 pagesWriting A Research Proposalasadhusain81815094% (18)
- 2018 School Inset Training MatrixDocument1 page2018 School Inset Training MatrixCelia PahalonNo ratings yet
- Real Listening and Speaking 2Document9 pagesReal Listening and Speaking 2Irina Chircev60% (5)
- 2 PBDocument10 pages2 PBmuh nasirNo ratings yet
- Corn Plant Counting Using Deep Learning and UAV ImagesDocument5 pagesCorn Plant Counting Using Deep Learning and UAV ImagesNicolás jkjNo ratings yet
- Ai in AgriDocument5 pagesAi in AgriSoham MullickNo ratings yet
- Sneha Sunita AgricultureDocument8 pagesSneha Sunita AgricultureBenci KhodeNo ratings yet
- Ai Based Crop Monitoring Using IOT: Under The Guidance of Prof. Chhaya NarvekarDocument19 pagesAi Based Crop Monitoring Using IOT: Under The Guidance of Prof. Chhaya NarvekarFarru GhNo ratings yet
- 1 s2.0 S2090447923003982 MainDocument15 pages1 s2.0 S2090447923003982 MainMinton IsmailNo ratings yet
- Internet-of-Things IoT-Based Smart Agriculture TowDocument34 pagesInternet-of-Things IoT-Based Smart Agriculture Towsbs systems1820No ratings yet
- Agricultures Connected Future How Technology Can Yield New Growth FDocument10 pagesAgricultures Connected Future How Technology Can Yield New Growth Fgeopan88100% (1)
- Benefits and Threats For Commodity, IrrigatingDocument8 pagesBenefits and Threats For Commodity, Irrigatingpttt2808No ratings yet
- An Agricultural IoT System To Accurately Reconize Crop DiseasesDocument13 pagesAn Agricultural IoT System To Accurately Reconize Crop DiseasesAbirNo ratings yet
- Innovations in Ubicomp Products: Agriculture's Technological MakeoverDocument4 pagesInnovations in Ubicomp Products: Agriculture's Technological MakeoverDhanasekar PNo ratings yet
- Ieee PaperDocument5 pagesIeee Paperpriya.keshavadasNo ratings yet
- Design and Implementation of Smart Hydroponics Far 2023-07-21 06-49-27Document12 pagesDesign and Implementation of Smart Hydroponics Far 2023-07-21 06-49-27dede.firmansyah.dfsNo ratings yet
- Crop Yield Detection and Monitoring The Growth Conference PaperDocument5 pagesCrop Yield Detection and Monitoring The Growth Conference Paperjayashree k0% (1)
- Artificial Intelligence PDFDocument4 pagesArtificial Intelligence PDFTOKAUNo ratings yet
- Artificial Intelligence in Agriculture: An Emerging Era of ResearchDocument8 pagesArtificial Intelligence in Agriculture: An Emerging Era of ResearchAissam EL Ibrahimi BouayadNo ratings yet
- Pest Detection in Plants Using Convolutional Neural NetworkDocument12 pagesPest Detection in Plants Using Convolutional Neural NetworkIJRASETPublicationsNo ratings yet
- Internet-Of-Things (Iot) - Based Smart Agriculture: Toward Making The Fields TalkDocument33 pagesInternet-Of-Things (Iot) - Based Smart Agriculture: Toward Making The Fields TalkRajNo ratings yet
- Deep Learning 2Document10 pagesDeep Learning 2Stark 0007No ratings yet
- AI in Agriculture - Research PaperDocument6 pagesAI in Agriculture - Research PaperAhsan JavedNo ratings yet
- Real-Time Human Tracking Using Multi-Features Visual With CNN-LSTM and Q-LearningDocument15 pagesReal-Time Human Tracking Using Multi-Features Visual With CNN-LSTM and Q-LearningEDARA KEERTHI LAHARINo ratings yet
- New Agriculture Technology in Modern FarmingDocument7 pagesNew Agriculture Technology in Modern Farmingnaveendevella123No ratings yet
- Accepted Manuscript: 10.1016/j.adhoc.2018.07.017Document20 pagesAccepted Manuscript: 10.1016/j.adhoc.2018.07.017Tomas JosephNo ratings yet
- IJCRT22A6679Document5 pagesIJCRT22A6679pallaviNo ratings yet
- Modern Agriculture PDFDocument6 pagesModern Agriculture PDFReal husseinNo ratings yet
- ArtificdssdsDocument8 pagesArtificdssdsRishit KasliwalNo ratings yet
- Impact of AI in AgricultureDocument3 pagesImpact of AI in Agriculture17-562 Ankitha EddeNo ratings yet
- Artificial Intelligence (AI) in Agriculture: International Journal of Current Microbiology and Applied SciencesDocument7 pagesArtificial Intelligence (AI) in Agriculture: International Journal of Current Microbiology and Applied SciencesDilan SarujanNo ratings yet
- Smart Agriculture in IndiaDocument19 pagesSmart Agriculture in IndiaAbhishek Minhas100% (1)
- Mcda 000792Document2 pagesMcda 000792Javier MartinNo ratings yet
- Plant Disease Detection Using Internet of Thing (Iot)Document5 pagesPlant Disease Detection Using Internet of Thing (Iot)Rana Mudassair HayatNo ratings yet
- Artificial Intelligence in Agriculture: Abstract: We All Know That in Our Contemporary DayDocument4 pagesArtificial Intelligence in Agriculture: Abstract: We All Know That in Our Contemporary Dayjey456No ratings yet
- 1 s2.0 S277323712200020X MainDocument16 pages1 s2.0 S277323712200020X MainNisarga K VNo ratings yet
- A Novel Intrusion Detection System For IIoT Using Inception Convolutional Neural NetworkDocument8 pagesA Novel Intrusion Detection System For IIoT Using Inception Convolutional Neural NetworkBOHR International Journal of Smart Computing and Information TechnologyNo ratings yet
- ManuscriptDocument7 pagesManuscriptSayyed MubashirNo ratings yet
- Precision FarmingDocument4 pagesPrecision FarmingEditor IJTSRDNo ratings yet
- A Self Regulatory System in Agriculture Using M-Cloud ComputingDocument4 pagesA Self Regulatory System in Agriculture Using M-Cloud ComputingVinay KumarNo ratings yet
- Project Proposal1Document6 pagesProject Proposal1Nanayaw CasperNo ratings yet
- Ijaerv14n6spl 44Document7 pagesIjaerv14n6spl 44LA garnerNo ratings yet
- 13 July2021Document8 pages13 July2021shital shermaleNo ratings yet
- Bindu TDDocument12 pagesBindu TDSahana SNo ratings yet
- Artificial Intelligence in Agriculture: Abstract: We All Know That in This Modern Era, TechnologyDocument4 pagesArtificial Intelligence in Agriculture: Abstract: We All Know That in This Modern Era, Technologyjey456No ratings yet
- Digital Market: E-Commerce Application For Farmers: Abstract: The Term Digital Market Means A Platform That IsDocument7 pagesDigital Market: E-Commerce Application For Farmers: Abstract: The Term Digital Market Means A Platform That IssegfserNo ratings yet
- 1 s2.0 S2214317320300196 MainDocument25 pages1 s2.0 S2214317320300196 MainMotiur RahamanNo ratings yet
- Research Paper Design of An Autonomous Rover Using Rocker Bogie Mechanism For Agriculture Application.Document5 pagesResearch Paper Design of An Autonomous Rover Using Rocker Bogie Mechanism For Agriculture Application.jatyapatil111No ratings yet
- 1 s2.0 S2772375522000090 STT02Document24 pages1 s2.0 S2772375522000090 STT02pthuynh709No ratings yet
- Plant Disease Detector: Pune Institute of Computer Technology (PICT)Document5 pagesPlant Disease Detector: Pune Institute of Computer Technology (PICT)Drawing n RockingNo ratings yet
- Indonesian E-AgricultureDocument8 pagesIndonesian E-Agriculturelook downNo ratings yet
- Drones The Newest Technology For Precision AgricultureDocument8 pagesDrones The Newest Technology For Precision AgricultureKashif AlimNo ratings yet
- Eco Tech Route Solution For Sustainable Development in The Agriculture SectorDocument9 pagesEco Tech Route Solution For Sustainable Development in The Agriculture SectorAadesh GaikwadNo ratings yet
- Development Status and Trend of Agricultural Robot TechnologyDocument19 pagesDevelopment Status and Trend of Agricultural Robot TechnologyZohaib KhanNo ratings yet
- Security Challenges To Smart Agriculture Current State, Key Issues, and Future DirectionsDocument12 pagesSecurity Challenges To Smart Agriculture Current State, Key Issues, and Future DirectionsflaviorochaavilaNo ratings yet
- Computers and Electronics in Agriculture: Zhaoyu Zhai, José Fernán Martínez, Victoria Beltran, Néstor Lucas Martínez TDocument16 pagesComputers and Electronics in Agriculture: Zhaoyu Zhai, José Fernán Martínez, Victoria Beltran, Néstor Lucas Martínez TshahidNo ratings yet
- Mobile Application For The Agricultural Mandi Using E-AuctionDocument7 pagesMobile Application For The Agricultural Mandi Using E-AuctionEditor IJTSRDNo ratings yet
- Article - Nalwade - 2017-Hydroponic FarmingDocument6 pagesArticle - Nalwade - 2017-Hydroponic FarmingRoberto VelazquezNo ratings yet
- Security and Privacy in Smart Farming Challenges and OpportunitiesDocument21 pagesSecurity and Privacy in Smart Farming Challenges and OpportunitiesLucas Adriano Maciel Dos SantosNo ratings yet
- Artificial IntelligencechapterDocument8 pagesArtificial IntelligencechapterTolĩnĩo Däba AmenũNo ratings yet
- "Smart Framing With Drones": Gian Raphael U. Molina Grade 7 Tle Week 5 Learning Task 6Document4 pages"Smart Framing With Drones": Gian Raphael U. Molina Grade 7 Tle Week 5 Learning Task 6K-ann AsensiNo ratings yet
- Digital Agriculture : Transforming the Landscape of Sustainable FarmingFrom EverandDigital Agriculture : Transforming the Landscape of Sustainable FarmingNo ratings yet
- 5 Stages To The Consumer Adoption ProcessDocument6 pages5 Stages To The Consumer Adoption ProcessAvinash SahuNo ratings yet
- Collaborative Partnership Knowledge Harvest: The NEC Journey in Hong KongDocument2 pagesCollaborative Partnership Knowledge Harvest: The NEC Journey in Hong KongfarthyNo ratings yet
- Language Governmentality in Philippine Education PolicyDocument19 pagesLanguage Governmentality in Philippine Education PolicyQueen EchavezNo ratings yet
- Fortinet Certification PathDocument1 pageFortinet Certification Pathtray zeroNo ratings yet
- DLL Music8Document4 pagesDLL Music8Jake Binuluan100% (1)
- Assessment: E-Commerce Is Curse or BlessingDocument5 pagesAssessment: E-Commerce Is Curse or BlessingMuhammad ShojibNo ratings yet
- CMMI SVC Quick Reference v1!2!02262009Document2 pagesCMMI SVC Quick Reference v1!2!02262009Abhinav ShekharNo ratings yet
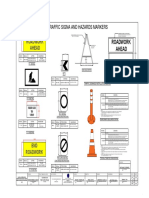
- Traffic Signa and Hazards Markers: Roadwork AheadDocument1 pageTraffic Signa and Hazards Markers: Roadwork AheadabigailNo ratings yet
- Jonathan Hughes - Ecology and Historical Materialism (Studies in Marxism and Social Theory) (2000)Document231 pagesJonathan Hughes - Ecology and Historical Materialism (Studies in Marxism and Social Theory) (2000)Gustavo MeyerNo ratings yet
- Kaushal Resume. - 1527127683159Document2 pagesKaushal Resume. - 1527127683159KaushalPatelNo ratings yet
- Unit 3 - Travel Changes Lives - EOI - Intermediate Level B1 - 1 T - 3 4 W O - 7 S 90 MDocument4 pagesUnit 3 - Travel Changes Lives - EOI - Intermediate Level B1 - 1 T - 3 4 W O - 7 S 90 MAurora M100% (1)
- BCR HandoutDocument2 pagesBCR HandoutshermjNo ratings yet
- Syllabus: Cambridge IGCSE (9-1) First Language English 0990Document35 pagesSyllabus: Cambridge IGCSE (9-1) First Language English 0990Epicmaster27No ratings yet
- Chapter 1 - Technology Management: Course Contents: Introduction To Technology Management, TM Activities andDocument16 pagesChapter 1 - Technology Management: Course Contents: Introduction To Technology Management, TM Activities andbakiz89No ratings yet
- Oral Communication in Context Grade 11: ScoreDocument3 pagesOral Communication in Context Grade 11: ScoreJhomarie De LeonNo ratings yet
- Irene Kacandes - Talk Fiction Literature and The Talk Explosion Frontiers of NarrativeDocument312 pagesIrene Kacandes - Talk Fiction Literature and The Talk Explosion Frontiers of NarrativePaanahedan100% (1)
- Aud 1206 Assignment Number 5 - Go, BrianjayDocument3 pagesAud 1206 Assignment Number 5 - Go, BrianjayBrian GoNo ratings yet
- Learner'S Packet No. 4 Quarter 2: SDO - HUMSS-TNCTC - Grade 11/12 - Q1 - LP 4Document6 pagesLearner'S Packet No. 4 Quarter 2: SDO - HUMSS-TNCTC - Grade 11/12 - Q1 - LP 4Ralph NavelinoNo ratings yet
- Racial Discrimination CIPDDocument8 pagesRacial Discrimination CIPDBlossom ViegasNo ratings yet
- Anhs Child Protection & Anti-BullyingDocument12 pagesAnhs Child Protection & Anti-BullyingJacqueline Acera BalingitNo ratings yet
- Agricultural Monitoring and Controlling System Using Wireless Sensor NetworkDocument10 pagesAgricultural Monitoring and Controlling System Using Wireless Sensor NetworkJhon ValenciaNo ratings yet
- Mehran University of Engineering & Technology: Application For Admission To Postgraduate ProgramDocument2 pagesMehran University of Engineering & Technology: Application For Admission To Postgraduate ProgramEngr Saud Shah BalochNo ratings yet
- Health CG - With Tagged Math Equipment 1-10Document116 pagesHealth CG - With Tagged Math Equipment 1-10Jan Aguilar EstefaniNo ratings yet
- Operations Management MCQs - Types of Production - MCQs ClubDocument7 pagesOperations Management MCQs - Types of Production - MCQs ClubPranoy SarkarNo ratings yet
- Education As A CounterDocument2 pagesEducation As A CounterVanderNo ratings yet
























































































Download as pdf or txt
You might also like
- A350 Cocpkit Preparation - V03TM1400232 - v1Document17 pagesA350 Cocpkit Preparation - V03TM1400232 - v1Iglesia Puente Largo Doha100% (6)
- Ebook - Drones in Agriculture - Seeing Beyond The Surface With Smart FarmingDocument39 pagesEbook - Drones in Agriculture - Seeing Beyond The Surface With Smart FarmingSyahrul KamilNo ratings yet
- School Subjects and The Time - Multiple Choice QuestionsDocument1 pageSchool Subjects and The Time - Multiple Choice QuestionsArroyoCala100% (1)
- Writing A Research ProposalDocument3 pagesWriting A Research Proposalasadhusain81815094% (18)
- 2018 School Inset Training MatrixDocument1 page2018 School Inset Training MatrixCelia PahalonNo ratings yet
- Real Listening and Speaking 2Document9 pagesReal Listening and Speaking 2Irina Chircev60% (5)
- 2 PBDocument10 pages2 PBmuh nasirNo ratings yet
- Corn Plant Counting Using Deep Learning and UAV ImagesDocument5 pagesCorn Plant Counting Using Deep Learning and UAV ImagesNicolás jkjNo ratings yet
- Ai in AgriDocument5 pagesAi in AgriSoham MullickNo ratings yet
- Sneha Sunita AgricultureDocument8 pagesSneha Sunita AgricultureBenci KhodeNo ratings yet
- Ai Based Crop Monitoring Using IOT: Under The Guidance of Prof. Chhaya NarvekarDocument19 pagesAi Based Crop Monitoring Using IOT: Under The Guidance of Prof. Chhaya NarvekarFarru GhNo ratings yet
- 1 s2.0 S2090447923003982 MainDocument15 pages1 s2.0 S2090447923003982 MainMinton IsmailNo ratings yet
- Internet-of-Things IoT-Based Smart Agriculture TowDocument34 pagesInternet-of-Things IoT-Based Smart Agriculture Towsbs systems1820No ratings yet
- Agricultures Connected Future How Technology Can Yield New Growth FDocument10 pagesAgricultures Connected Future How Technology Can Yield New Growth Fgeopan88100% (1)
- Benefits and Threats For Commodity, IrrigatingDocument8 pagesBenefits and Threats For Commodity, Irrigatingpttt2808No ratings yet
- An Agricultural IoT System To Accurately Reconize Crop DiseasesDocument13 pagesAn Agricultural IoT System To Accurately Reconize Crop DiseasesAbirNo ratings yet
- Innovations in Ubicomp Products: Agriculture's Technological MakeoverDocument4 pagesInnovations in Ubicomp Products: Agriculture's Technological MakeoverDhanasekar PNo ratings yet
- Ieee PaperDocument5 pagesIeee Paperpriya.keshavadasNo ratings yet
- Design and Implementation of Smart Hydroponics Far 2023-07-21 06-49-27Document12 pagesDesign and Implementation of Smart Hydroponics Far 2023-07-21 06-49-27dede.firmansyah.dfsNo ratings yet
- Crop Yield Detection and Monitoring The Growth Conference PaperDocument5 pagesCrop Yield Detection and Monitoring The Growth Conference Paperjayashree k0% (1)
- Artificial Intelligence PDFDocument4 pagesArtificial Intelligence PDFTOKAUNo ratings yet
- Artificial Intelligence in Agriculture: An Emerging Era of ResearchDocument8 pagesArtificial Intelligence in Agriculture: An Emerging Era of ResearchAissam EL Ibrahimi BouayadNo ratings yet
- Pest Detection in Plants Using Convolutional Neural NetworkDocument12 pagesPest Detection in Plants Using Convolutional Neural NetworkIJRASETPublicationsNo ratings yet
- Internet-Of-Things (Iot) - Based Smart Agriculture: Toward Making The Fields TalkDocument33 pagesInternet-Of-Things (Iot) - Based Smart Agriculture: Toward Making The Fields TalkRajNo ratings yet
- Deep Learning 2Document10 pagesDeep Learning 2Stark 0007No ratings yet
- AI in Agriculture - Research PaperDocument6 pagesAI in Agriculture - Research PaperAhsan JavedNo ratings yet
- Real-Time Human Tracking Using Multi-Features Visual With CNN-LSTM and Q-LearningDocument15 pagesReal-Time Human Tracking Using Multi-Features Visual With CNN-LSTM and Q-LearningEDARA KEERTHI LAHARINo ratings yet
- New Agriculture Technology in Modern FarmingDocument7 pagesNew Agriculture Technology in Modern Farmingnaveendevella123No ratings yet
- Accepted Manuscript: 10.1016/j.adhoc.2018.07.017Document20 pagesAccepted Manuscript: 10.1016/j.adhoc.2018.07.017Tomas JosephNo ratings yet
- IJCRT22A6679Document5 pagesIJCRT22A6679pallaviNo ratings yet
- Modern Agriculture PDFDocument6 pagesModern Agriculture PDFReal husseinNo ratings yet
- ArtificdssdsDocument8 pagesArtificdssdsRishit KasliwalNo ratings yet
- Impact of AI in AgricultureDocument3 pagesImpact of AI in Agriculture17-562 Ankitha EddeNo ratings yet
- Artificial Intelligence (AI) in Agriculture: International Journal of Current Microbiology and Applied SciencesDocument7 pagesArtificial Intelligence (AI) in Agriculture: International Journal of Current Microbiology and Applied SciencesDilan SarujanNo ratings yet
- Smart Agriculture in IndiaDocument19 pagesSmart Agriculture in IndiaAbhishek Minhas100% (1)
- Mcda 000792Document2 pagesMcda 000792Javier MartinNo ratings yet
- Plant Disease Detection Using Internet of Thing (Iot)Document5 pagesPlant Disease Detection Using Internet of Thing (Iot)Rana Mudassair HayatNo ratings yet
- Artificial Intelligence in Agriculture: Abstract: We All Know That in Our Contemporary DayDocument4 pagesArtificial Intelligence in Agriculture: Abstract: We All Know That in Our Contemporary Dayjey456No ratings yet
- 1 s2.0 S277323712200020X MainDocument16 pages1 s2.0 S277323712200020X MainNisarga K VNo ratings yet
- A Novel Intrusion Detection System For IIoT Using Inception Convolutional Neural NetworkDocument8 pagesA Novel Intrusion Detection System For IIoT Using Inception Convolutional Neural NetworkBOHR International Journal of Smart Computing and Information TechnologyNo ratings yet
- ManuscriptDocument7 pagesManuscriptSayyed MubashirNo ratings yet
- Precision FarmingDocument4 pagesPrecision FarmingEditor IJTSRDNo ratings yet
- A Self Regulatory System in Agriculture Using M-Cloud ComputingDocument4 pagesA Self Regulatory System in Agriculture Using M-Cloud ComputingVinay KumarNo ratings yet
- Project Proposal1Document6 pagesProject Proposal1Nanayaw CasperNo ratings yet
- Ijaerv14n6spl 44Document7 pagesIjaerv14n6spl 44LA garnerNo ratings yet
- 13 July2021Document8 pages13 July2021shital shermaleNo ratings yet
- Bindu TDDocument12 pagesBindu TDSahana SNo ratings yet
- Artificial Intelligence in Agriculture: Abstract: We All Know That in This Modern Era, TechnologyDocument4 pagesArtificial Intelligence in Agriculture: Abstract: We All Know That in This Modern Era, Technologyjey456No ratings yet
- Digital Market: E-Commerce Application For Farmers: Abstract: The Term Digital Market Means A Platform That IsDocument7 pagesDigital Market: E-Commerce Application For Farmers: Abstract: The Term Digital Market Means A Platform That IssegfserNo ratings yet
- 1 s2.0 S2214317320300196 MainDocument25 pages1 s2.0 S2214317320300196 MainMotiur RahamanNo ratings yet
- Research Paper Design of An Autonomous Rover Using Rocker Bogie Mechanism For Agriculture Application.Document5 pagesResearch Paper Design of An Autonomous Rover Using Rocker Bogie Mechanism For Agriculture Application.jatyapatil111No ratings yet
- 1 s2.0 S2772375522000090 STT02Document24 pages1 s2.0 S2772375522000090 STT02pthuynh709No ratings yet
- Plant Disease Detector: Pune Institute of Computer Technology (PICT)Document5 pagesPlant Disease Detector: Pune Institute of Computer Technology (PICT)Drawing n RockingNo ratings yet
- Indonesian E-AgricultureDocument8 pagesIndonesian E-Agriculturelook downNo ratings yet
- Drones The Newest Technology For Precision AgricultureDocument8 pagesDrones The Newest Technology For Precision AgricultureKashif AlimNo ratings yet
- Eco Tech Route Solution For Sustainable Development in The Agriculture SectorDocument9 pagesEco Tech Route Solution For Sustainable Development in The Agriculture SectorAadesh GaikwadNo ratings yet
- Development Status and Trend of Agricultural Robot TechnologyDocument19 pagesDevelopment Status and Trend of Agricultural Robot TechnologyZohaib KhanNo ratings yet
- Security Challenges To Smart Agriculture Current State, Key Issues, and Future DirectionsDocument12 pagesSecurity Challenges To Smart Agriculture Current State, Key Issues, and Future DirectionsflaviorochaavilaNo ratings yet
- Computers and Electronics in Agriculture: Zhaoyu Zhai, José Fernán Martínez, Victoria Beltran, Néstor Lucas Martínez TDocument16 pagesComputers and Electronics in Agriculture: Zhaoyu Zhai, José Fernán Martínez, Victoria Beltran, Néstor Lucas Martínez TshahidNo ratings yet
- Mobile Application For The Agricultural Mandi Using E-AuctionDocument7 pagesMobile Application For The Agricultural Mandi Using E-AuctionEditor IJTSRDNo ratings yet
- Article - Nalwade - 2017-Hydroponic FarmingDocument6 pagesArticle - Nalwade - 2017-Hydroponic FarmingRoberto VelazquezNo ratings yet
- Security and Privacy in Smart Farming Challenges and OpportunitiesDocument21 pagesSecurity and Privacy in Smart Farming Challenges and OpportunitiesLucas Adriano Maciel Dos SantosNo ratings yet
- Artificial IntelligencechapterDocument8 pagesArtificial IntelligencechapterTolĩnĩo Däba AmenũNo ratings yet
- "Smart Framing With Drones": Gian Raphael U. Molina Grade 7 Tle Week 5 Learning Task 6Document4 pages"Smart Framing With Drones": Gian Raphael U. Molina Grade 7 Tle Week 5 Learning Task 6K-ann AsensiNo ratings yet
- Digital Agriculture : Transforming the Landscape of Sustainable FarmingFrom EverandDigital Agriculture : Transforming the Landscape of Sustainable FarmingNo ratings yet
- 5 Stages To The Consumer Adoption ProcessDocument6 pages5 Stages To The Consumer Adoption ProcessAvinash SahuNo ratings yet
- Collaborative Partnership Knowledge Harvest: The NEC Journey in Hong KongDocument2 pagesCollaborative Partnership Knowledge Harvest: The NEC Journey in Hong KongfarthyNo ratings yet
- Language Governmentality in Philippine Education PolicyDocument19 pagesLanguage Governmentality in Philippine Education PolicyQueen EchavezNo ratings yet
- Fortinet Certification PathDocument1 pageFortinet Certification Pathtray zeroNo ratings yet
- DLL Music8Document4 pagesDLL Music8Jake Binuluan100% (1)
- Assessment: E-Commerce Is Curse or BlessingDocument5 pagesAssessment: E-Commerce Is Curse or BlessingMuhammad ShojibNo ratings yet
- CMMI SVC Quick Reference v1!2!02262009Document2 pagesCMMI SVC Quick Reference v1!2!02262009Abhinav ShekharNo ratings yet
- Traffic Signa and Hazards Markers: Roadwork AheadDocument1 pageTraffic Signa and Hazards Markers: Roadwork AheadabigailNo ratings yet
- Jonathan Hughes - Ecology and Historical Materialism (Studies in Marxism and Social Theory) (2000)Document231 pagesJonathan Hughes - Ecology and Historical Materialism (Studies in Marxism and Social Theory) (2000)Gustavo MeyerNo ratings yet
- Kaushal Resume. - 1527127683159Document2 pagesKaushal Resume. - 1527127683159KaushalPatelNo ratings yet
- Unit 3 - Travel Changes Lives - EOI - Intermediate Level B1 - 1 T - 3 4 W O - 7 S 90 MDocument4 pagesUnit 3 - Travel Changes Lives - EOI - Intermediate Level B1 - 1 T - 3 4 W O - 7 S 90 MAurora M100% (1)
- BCR HandoutDocument2 pagesBCR HandoutshermjNo ratings yet
- Syllabus: Cambridge IGCSE (9-1) First Language English 0990Document35 pagesSyllabus: Cambridge IGCSE (9-1) First Language English 0990Epicmaster27No ratings yet
- Chapter 1 - Technology Management: Course Contents: Introduction To Technology Management, TM Activities andDocument16 pagesChapter 1 - Technology Management: Course Contents: Introduction To Technology Management, TM Activities andbakiz89No ratings yet
- Oral Communication in Context Grade 11: ScoreDocument3 pagesOral Communication in Context Grade 11: ScoreJhomarie De LeonNo ratings yet
- Irene Kacandes - Talk Fiction Literature and The Talk Explosion Frontiers of NarrativeDocument312 pagesIrene Kacandes - Talk Fiction Literature and The Talk Explosion Frontiers of NarrativePaanahedan100% (1)
- Aud 1206 Assignment Number 5 - Go, BrianjayDocument3 pagesAud 1206 Assignment Number 5 - Go, BrianjayBrian GoNo ratings yet
- Learner'S Packet No. 4 Quarter 2: SDO - HUMSS-TNCTC - Grade 11/12 - Q1 - LP 4Document6 pagesLearner'S Packet No. 4 Quarter 2: SDO - HUMSS-TNCTC - Grade 11/12 - Q1 - LP 4Ralph NavelinoNo ratings yet
- Racial Discrimination CIPDDocument8 pagesRacial Discrimination CIPDBlossom ViegasNo ratings yet
- Anhs Child Protection & Anti-BullyingDocument12 pagesAnhs Child Protection & Anti-BullyingJacqueline Acera BalingitNo ratings yet
- Agricultural Monitoring and Controlling System Using Wireless Sensor NetworkDocument10 pagesAgricultural Monitoring and Controlling System Using Wireless Sensor NetworkJhon ValenciaNo ratings yet
- Mehran University of Engineering & Technology: Application For Admission To Postgraduate ProgramDocument2 pagesMehran University of Engineering & Technology: Application For Admission To Postgraduate ProgramEngr Saud Shah BalochNo ratings yet
- Health CG - With Tagged Math Equipment 1-10Document116 pagesHealth CG - With Tagged Math Equipment 1-10Jan Aguilar EstefaniNo ratings yet
- Operations Management MCQs - Types of Production - MCQs ClubDocument7 pagesOperations Management MCQs - Types of Production - MCQs ClubPranoy SarkarNo ratings yet
- Education As A CounterDocument2 pagesEducation As A CounterVanderNo ratings yet