
App PID
App PID
You might also like
- Expressing Sympathy - Lesson PlanDocument4 pagesExpressing Sympathy - Lesson PlanJP MontesNo ratings yet
- The Oxford Starter Japanese DictionaryDocument452 pagesThe Oxford Starter Japanese Dictionarymangi100% (4)
- ELTM Chapter 6 (Teaching Across Age Levels)Document5 pagesELTM Chapter 6 (Teaching Across Age Levels)DikaNo ratings yet
- Design and Tuning of Fuzzy Logic PID ControllerDocument19 pagesDesign and Tuning of Fuzzy Logic PID ControllerPriya BhardwajNo ratings yet
- PID Controller Working Principle Explained For BeginnersDocument6 pagesPID Controller Working Principle Explained For BeginnersPramillaNo ratings yet
- PID ControllersDocument6 pagesPID ControllersNguyễn HảiNo ratings yet
- Modren Control: Prepared by The StudentDocument12 pagesModren Control: Prepared by The StudenthassanalabasiNo ratings yet
- The Working Principle of A PID Controller For BeginnersDocument15 pagesThe Working Principle of A PID Controller For BeginnersSaber AbdelaalNo ratings yet
- Module 10 - Loop TuningDocument41 pagesModule 10 - Loop TuningHtet LwinNo ratings yet
- Pid Tuning MethodsDocument16 pagesPid Tuning MethodsNirmal sachanNo ratings yet
- PID ControlDocument32 pagesPID ControlSyamil RahmanNo ratings yet
- 1 - 1 - IntroducaoDocument31 pages1 - 1 - IntroducaoAndré GomesNo ratings yet
- Real Time Speed Control of DC Motor With Unknown Transfer Function Through PIDDocument6 pagesReal Time Speed Control of DC Motor With Unknown Transfer Function Through PIDArbab HaiderNo ratings yet
- Pid PDFDocument22 pagesPid PDFmansoorNo ratings yet
- PID ControllersDocument9 pagesPID Controllerszs94qjqcx7No ratings yet
- What Is A PID ControllerDocument11 pagesWhat Is A PID ControllerANRG Batch 11No ratings yet
- Controllers and Thier Tuningclo2Document31 pagesControllers and Thier Tuningclo2AreeshaNo ratings yet
- How Does A PID Controller Work - Structure & Tuning MethodsDocument12 pagesHow Does A PID Controller Work - Structure & Tuning Methodsmurugan1984No ratings yet
- Ee342 - Pid Controllers - 2020Document42 pagesEe342 - Pid Controllers - 2020ShadrackNo ratings yet
- Control SystemsDocument18 pagesControl Systemsgayatri jaltareNo ratings yet
- PracticalDocument10 pagesPracticalSec ArcNo ratings yet
- PID ControllerDocument5 pagesPID ControllerAbhilash MallikarjunaNo ratings yet
- PROGRAMMING-EXERCISE-03 - Boniel, LamsisDocument4 pagesPROGRAMMING-EXERCISE-03 - Boniel, LamsisJeremiah PuaNo ratings yet
- Traditional PID Control Method: Fundamental of Instruments and Process Course Name: Myo Zaw Oo Student ID: 3122999029Document11 pagesTraditional PID Control Method: Fundamental of Instruments and Process Course Name: Myo Zaw Oo Student ID: 3122999029Myo Zaw OoNo ratings yet
- PID Lab HandoutDocument16 pagesPID Lab HandoutsteedNo ratings yet
- Unitvi Control SystemsDocument47 pagesUnitvi Control SystemsVishal SharmaNo ratings yet
- Design and Simulation of DA Based PID Controller Using Verilog CodingDocument6 pagesDesign and Simulation of DA Based PID Controller Using Verilog Codingjamal2877No ratings yet
- PlssDocument21 pagesPlssKrishi ChhedaNo ratings yet
- CH 2Document48 pagesCH 2Endalew kassahunNo ratings yet
- Mesb333 Pid ControlDocument13 pagesMesb333 Pid ControlMohd KhairiNo ratings yet
- PCD ProjectDocument3 pagesPCD ProjectSasmilah KandsamyNo ratings yet
- Pidcontrollers 150912140326 Lva1 App6892 PDFDocument18 pagesPidcontrollers 150912140326 Lva1 App6892 PDFKalyan TejaNo ratings yet
- PID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015Document18 pagesPID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015aditee saxenaaNo ratings yet
- Controllers P Controller:: Fig 1. Temperature-Time Table of A Proportional Controller and Average Case Error StatusDocument2 pagesControllers P Controller:: Fig 1. Temperature-Time Table of A Proportional Controller and Average Case Error StatusBerkcan ArslanNo ratings yet
- Kfetrkt: Plant T) Process KeDocument4 pagesKfetrkt: Plant T) Process KeAmogh RNo ratings yet
- PID ControllerDocument16 pagesPID ControllerDevarya ChhibberNo ratings yet
- Working or Operation of PID ControllerDocument7 pagesWorking or Operation of PID Controllerjohn glenn magnoNo ratings yet
- PID CONTROLLERS Seminar FINALDocument20 pagesPID CONTROLLERS Seminar FINALgagan sharmaNo ratings yet
- Chapter 6 PIDDocument43 pagesChapter 6 PIDkibrom atsbhaNo ratings yet
- Chapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGDocument5 pagesChapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGLakshmiNo ratings yet
- Routh-Hurwitz Stability CriterionDocument37 pagesRouth-Hurwitz Stability CriterionNagajyothiVirivintiNo ratings yet
- Digital Pid Controller - 72S173Document15 pagesDigital Pid Controller - 72S173Pandimadevi GanesanNo ratings yet
- Chapter 4 - PID ControllerDocument62 pagesChapter 4 - PID ControllerHuy Nguyen LuongNo ratings yet
- PROGRAMMING EXERCISE 03 Zarelle and CheloDocument4 pagesPROGRAMMING EXERCISE 03 Zarelle and CheloJeremiah PuaNo ratings yet
- Course Outline: DGU3073 Process Instrumentation & ControlDocument66 pagesCourse Outline: DGU3073 Process Instrumentation & ControlAaron ChinNo ratings yet
- Auto1 Kupe6 Co2 Resurreccion DefinitionsDocument4 pagesAuto1 Kupe6 Co2 Resurreccion DefinitionsaltheiaarabeeeNo ratings yet
- Sanji MIMO DissDocument3 pagesSanji MIMO DissSanjaya SrinathNo ratings yet
- In Group VII: Members: Bayona, Jose Rollen A. Perreras, Roland R Depallo, Justin R. Logrono, Stephen ADocument4 pagesIn Group VII: Members: Bayona, Jose Rollen A. Perreras, Roland R Depallo, Justin R. Logrono, Stephen ACollim Hajime NivaledNo ratings yet
- Controls YsDocument17 pagesControls Ysbamboo shackNo ratings yet
- PID ControllerDocument7 pagesPID ControllerPromise EnyinnayaNo ratings yet
- Pid ThoryDocument24 pagesPid ThoryPravin KumarNo ratings yet
- Development of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringDocument23 pagesDevelopment of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringHakan AykuluNo ratings yet
- PID Theory From WikipediaDocument7 pagesPID Theory From Wikipediaputra-tzuNo ratings yet
- Control Systems Lect. 4 PIDDocument65 pagesControl Systems Lect. 4 PIDhmaymadNo ratings yet
- PID Robust Control Using Taguchi MethodDocument6 pagesPID Robust Control Using Taguchi MethodIsra Lemus SanchezNo ratings yet
- Basic Chemical EngineeringDocument13 pagesBasic Chemical EngineeringpratikNo ratings yet
- Chapter - 4 Control Configuration 4.1 Pid ControllerDocument8 pagesChapter - 4 Control Configuration 4.1 Pid ControllerMoorthy ManikandanNo ratings yet
- EVMS Full Notes PDFDocument78 pagesEVMS Full Notes PDFNaveen DhanurajNo ratings yet
- Pid Limitations & Application by PrincessDocument24 pagesPid Limitations & Application by PrincessPrincess CutabNo ratings yet
- Proportional Integral Derivative (PID)Document27 pagesProportional Integral Derivative (PID)GilagidkidNo ratings yet
- PLC SCADA Based Temperature Control SystemDocument5 pagesPLC SCADA Based Temperature Control SystemSaurav TiwariNo ratings yet
- Control EngineeringDocument20 pagesControl EngineeringNor AshimyNo ratings yet
- 2017 Set 2 IitrDocument24 pages2017 Set 2 IitrP Praveen KumarNo ratings yet
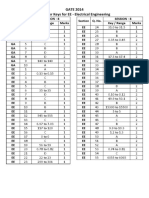
- 2014 Set 2 KeyDocument1 page2014 Set 2 KeyP Praveen KumarNo ratings yet
- 2012 KeyDocument1 page2012 KeyP Praveen KumarNo ratings yet
- Q.No. Type Section Key/Range MarksDocument3 pagesQ.No. Type Section Key/Range MarksP Praveen KumarNo ratings yet
- Q.No. Type Section Key MarksDocument3 pagesQ.No. Type Section Key MarksP Praveen KumarNo ratings yet
- Control System PPKDocument6 pagesControl System PPKP Praveen KumarNo ratings yet
- Control System PPKDocument13 pagesControl System PPKP Praveen KumarNo ratings yet
- Control System PPKDocument8 pagesControl System PPKP Praveen KumarNo ratings yet
- Control System PPKDocument42 pagesControl System PPKP Praveen KumarNo ratings yet
- Control System PPKDocument5 pagesControl System PPKP Praveen KumarNo ratings yet
- What Is Information Retrieval (IR) ?Document21 pagesWhat Is Information Retrieval (IR) ?Hussain SaeedNo ratings yet
- DIAZ COLLEGE - PrelimDocument5 pagesDIAZ COLLEGE - PrelimKhim KimNo ratings yet
- Lesson Plan in Disciplines and Ideas in The Applied Social SciencesDocument6 pagesLesson Plan in Disciplines and Ideas in The Applied Social SciencesChing Laguna Dacayana-AlvarezNo ratings yet
- Reviewing Books and ArticlesDocument5 pagesReviewing Books and ArticlesAma CandraNo ratings yet
- DLL English 5 q1 w10Document5 pagesDLL English 5 q1 w10janet juntillaNo ratings yet
- Critical Discourse Analysis: Norman FaircloughDocument28 pagesCritical Discourse Analysis: Norman Faircloughemo_transNo ratings yet
- Parte 1 - Introducción - Rigour and Complexity - KINCHELOEDocument22 pagesParte 1 - Introducción - Rigour and Complexity - KINCHELOEYaimar MontoyaNo ratings yet
- Chem Eng 3P4 Assignment 6 DUE 5:00pm Fri 04/01/11Document4 pagesChem Eng 3P4 Assignment 6 DUE 5:00pm Fri 04/01/11Victoria HillierNo ratings yet
- Content Analysis in International RelationsDocument12 pagesContent Analysis in International RelationsNUR MAIDIZAH BINTI MAIDINNo ratings yet
- Lesson Plan Affirmative and Negative Form of To BeDocument5 pagesLesson Plan Affirmative and Negative Form of To BeMaidy Lisseth Villamizar ArrietaNo ratings yet
- Small Collection of Ebook About Learning English TOEFLDocument3 pagesSmall Collection of Ebook About Learning English TOEFLDax SeutterNo ratings yet
- Lss%20 Lecture%20 NotesDocument81 pagesLss%20 Lecture%20 NotesAGBOLOSU MAWUSENo ratings yet
- Roman Numerals LPDocument5 pagesRoman Numerals LPapi-315857509No ratings yet
- Current Trend in PsychologyDocument3 pagesCurrent Trend in PsychologyRobia RanaNo ratings yet
- Detailed Lesson PlannnnnnDocument9 pagesDetailed Lesson PlannnnnnJohn Argie Pascual GuansingNo ratings yet
- THINK L4 Unit 6 Grammar BasicDocument2 pagesTHINK L4 Unit 6 Grammar Basicniyazi polatNo ratings yet
- Cosc7312 Test RevisionDocument3 pagesCosc7312 Test Revisionapi-281655169No ratings yet
- Elementary - TBDocument131 pagesElementary - TBBalázs László89% (9)
- Sample 3Document159 pagesSample 3Sarah Abu TalibNo ratings yet
- Instructional Plan - Grade 8 - 2nd Quarter-2018-19Document14 pagesInstructional Plan - Grade 8 - 2nd Quarter-2018-19adonis bucoy100% (2)
- Emilio Jose Sr. Elementary School: Activity Design I. General InformationDocument3 pagesEmilio Jose Sr. Elementary School: Activity Design I. General InformationRichie Macasarte100% (2)
- Evaluative CommentaryDocument2 pagesEvaluative CommentaryNatasha Yana100% (2)
- Present Perfect TenseDocument2 pagesPresent Perfect TenseNur Infita KameliaNo ratings yet
- Milton EricksonDocument5 pagesMilton Ericksonosher26100% (2)
- 7 Research DesignDocument21 pages7 Research DesignRans-Nana Kwame-BoatengNo ratings yet
- Leadership Behavior and MotivationDocument35 pagesLeadership Behavior and MotivationNUR ATIQAHNo ratings yet
- Langer Representation and Emotion in MusicDocument10 pagesLanger Representation and Emotion in MusicMarc BrooksNo ratings yet


































































































Download as pdf or txt
You might also like
- Expressing Sympathy - Lesson PlanDocument4 pagesExpressing Sympathy - Lesson PlanJP MontesNo ratings yet
- The Oxford Starter Japanese DictionaryDocument452 pagesThe Oxford Starter Japanese Dictionarymangi100% (4)
- ELTM Chapter 6 (Teaching Across Age Levels)Document5 pagesELTM Chapter 6 (Teaching Across Age Levels)DikaNo ratings yet
- Design and Tuning of Fuzzy Logic PID ControllerDocument19 pagesDesign and Tuning of Fuzzy Logic PID ControllerPriya BhardwajNo ratings yet
- PID Controller Working Principle Explained For BeginnersDocument6 pagesPID Controller Working Principle Explained For BeginnersPramillaNo ratings yet
- PID ControllersDocument6 pagesPID ControllersNguyễn HảiNo ratings yet
- Modren Control: Prepared by The StudentDocument12 pagesModren Control: Prepared by The StudenthassanalabasiNo ratings yet
- The Working Principle of A PID Controller For BeginnersDocument15 pagesThe Working Principle of A PID Controller For BeginnersSaber AbdelaalNo ratings yet
- Module 10 - Loop TuningDocument41 pagesModule 10 - Loop TuningHtet LwinNo ratings yet
- Pid Tuning MethodsDocument16 pagesPid Tuning MethodsNirmal sachanNo ratings yet
- PID ControlDocument32 pagesPID ControlSyamil RahmanNo ratings yet
- 1 - 1 - IntroducaoDocument31 pages1 - 1 - IntroducaoAndré GomesNo ratings yet
- Real Time Speed Control of DC Motor With Unknown Transfer Function Through PIDDocument6 pagesReal Time Speed Control of DC Motor With Unknown Transfer Function Through PIDArbab HaiderNo ratings yet
- Pid PDFDocument22 pagesPid PDFmansoorNo ratings yet
- PID ControllersDocument9 pagesPID Controllerszs94qjqcx7No ratings yet
- What Is A PID ControllerDocument11 pagesWhat Is A PID ControllerANRG Batch 11No ratings yet
- Controllers and Thier Tuningclo2Document31 pagesControllers and Thier Tuningclo2AreeshaNo ratings yet
- How Does A PID Controller Work - Structure & Tuning MethodsDocument12 pagesHow Does A PID Controller Work - Structure & Tuning Methodsmurugan1984No ratings yet
- Ee342 - Pid Controllers - 2020Document42 pagesEe342 - Pid Controllers - 2020ShadrackNo ratings yet
- Control SystemsDocument18 pagesControl Systemsgayatri jaltareNo ratings yet
- PracticalDocument10 pagesPracticalSec ArcNo ratings yet
- PID ControllerDocument5 pagesPID ControllerAbhilash MallikarjunaNo ratings yet
- PROGRAMMING-EXERCISE-03 - Boniel, LamsisDocument4 pagesPROGRAMMING-EXERCISE-03 - Boniel, LamsisJeremiah PuaNo ratings yet
- Traditional PID Control Method: Fundamental of Instruments and Process Course Name: Myo Zaw Oo Student ID: 3122999029Document11 pagesTraditional PID Control Method: Fundamental of Instruments and Process Course Name: Myo Zaw Oo Student ID: 3122999029Myo Zaw OoNo ratings yet
- PID Lab HandoutDocument16 pagesPID Lab HandoutsteedNo ratings yet
- Unitvi Control SystemsDocument47 pagesUnitvi Control SystemsVishal SharmaNo ratings yet
- Design and Simulation of DA Based PID Controller Using Verilog CodingDocument6 pagesDesign and Simulation of DA Based PID Controller Using Verilog Codingjamal2877No ratings yet
- PlssDocument21 pagesPlssKrishi ChhedaNo ratings yet
- CH 2Document48 pagesCH 2Endalew kassahunNo ratings yet
- Mesb333 Pid ControlDocument13 pagesMesb333 Pid ControlMohd KhairiNo ratings yet
- PCD ProjectDocument3 pagesPCD ProjectSasmilah KandsamyNo ratings yet
- Pidcontrollers 150912140326 Lva1 App6892 PDFDocument18 pagesPidcontrollers 150912140326 Lva1 App6892 PDFKalyan TejaNo ratings yet
- PID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015Document18 pagesPID Controllers: Abhishek Mehta EEE Department UIET, Panjab University September 11,2015aditee saxenaaNo ratings yet
- Controllers P Controller:: Fig 1. Temperature-Time Table of A Proportional Controller and Average Case Error StatusDocument2 pagesControllers P Controller:: Fig 1. Temperature-Time Table of A Proportional Controller and Average Case Error StatusBerkcan ArslanNo ratings yet
- Kfetrkt: Plant T) Process KeDocument4 pagesKfetrkt: Plant T) Process KeAmogh RNo ratings yet
- PID ControllerDocument16 pagesPID ControllerDevarya ChhibberNo ratings yet
- Working or Operation of PID ControllerDocument7 pagesWorking or Operation of PID Controllerjohn glenn magnoNo ratings yet
- PID CONTROLLERS Seminar FINALDocument20 pagesPID CONTROLLERS Seminar FINALgagan sharmaNo ratings yet
- Chapter 6 PIDDocument43 pagesChapter 6 PIDkibrom atsbhaNo ratings yet
- Chapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGDocument5 pagesChapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGLakshmiNo ratings yet
- Routh-Hurwitz Stability CriterionDocument37 pagesRouth-Hurwitz Stability CriterionNagajyothiVirivintiNo ratings yet
- Digital Pid Controller - 72S173Document15 pagesDigital Pid Controller - 72S173Pandimadevi GanesanNo ratings yet
- Chapter 4 - PID ControllerDocument62 pagesChapter 4 - PID ControllerHuy Nguyen LuongNo ratings yet
- PROGRAMMING EXERCISE 03 Zarelle and CheloDocument4 pagesPROGRAMMING EXERCISE 03 Zarelle and CheloJeremiah PuaNo ratings yet
- Course Outline: DGU3073 Process Instrumentation & ControlDocument66 pagesCourse Outline: DGU3073 Process Instrumentation & ControlAaron ChinNo ratings yet
- Auto1 Kupe6 Co2 Resurreccion DefinitionsDocument4 pagesAuto1 Kupe6 Co2 Resurreccion DefinitionsaltheiaarabeeeNo ratings yet
- Sanji MIMO DissDocument3 pagesSanji MIMO DissSanjaya SrinathNo ratings yet
- In Group VII: Members: Bayona, Jose Rollen A. Perreras, Roland R Depallo, Justin R. Logrono, Stephen ADocument4 pagesIn Group VII: Members: Bayona, Jose Rollen A. Perreras, Roland R Depallo, Justin R. Logrono, Stephen ACollim Hajime NivaledNo ratings yet
- Controls YsDocument17 pagesControls Ysbamboo shackNo ratings yet
- PID ControllerDocument7 pagesPID ControllerPromise EnyinnayaNo ratings yet
- Pid ThoryDocument24 pagesPid ThoryPravin KumarNo ratings yet
- Development of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringDocument23 pagesDevelopment of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringHakan AykuluNo ratings yet
- PID Theory From WikipediaDocument7 pagesPID Theory From Wikipediaputra-tzuNo ratings yet
- Control Systems Lect. 4 PIDDocument65 pagesControl Systems Lect. 4 PIDhmaymadNo ratings yet
- PID Robust Control Using Taguchi MethodDocument6 pagesPID Robust Control Using Taguchi MethodIsra Lemus SanchezNo ratings yet
- Basic Chemical EngineeringDocument13 pagesBasic Chemical EngineeringpratikNo ratings yet
- Chapter - 4 Control Configuration 4.1 Pid ControllerDocument8 pagesChapter - 4 Control Configuration 4.1 Pid ControllerMoorthy ManikandanNo ratings yet
- EVMS Full Notes PDFDocument78 pagesEVMS Full Notes PDFNaveen DhanurajNo ratings yet
- Pid Limitations & Application by PrincessDocument24 pagesPid Limitations & Application by PrincessPrincess CutabNo ratings yet
- Proportional Integral Derivative (PID)Document27 pagesProportional Integral Derivative (PID)GilagidkidNo ratings yet
- PLC SCADA Based Temperature Control SystemDocument5 pagesPLC SCADA Based Temperature Control SystemSaurav TiwariNo ratings yet
- Control EngineeringDocument20 pagesControl EngineeringNor AshimyNo ratings yet
- 2017 Set 2 IitrDocument24 pages2017 Set 2 IitrP Praveen KumarNo ratings yet
- 2014 Set 2 KeyDocument1 page2014 Set 2 KeyP Praveen KumarNo ratings yet
- 2012 KeyDocument1 page2012 KeyP Praveen KumarNo ratings yet
- Q.No. Type Section Key/Range MarksDocument3 pagesQ.No. Type Section Key/Range MarksP Praveen KumarNo ratings yet
- Q.No. Type Section Key MarksDocument3 pagesQ.No. Type Section Key MarksP Praveen KumarNo ratings yet
- Control System PPKDocument6 pagesControl System PPKP Praveen KumarNo ratings yet
- Control System PPKDocument13 pagesControl System PPKP Praveen KumarNo ratings yet
- Control System PPKDocument8 pagesControl System PPKP Praveen KumarNo ratings yet
- Control System PPKDocument42 pagesControl System PPKP Praveen KumarNo ratings yet
- Control System PPKDocument5 pagesControl System PPKP Praveen KumarNo ratings yet
- What Is Information Retrieval (IR) ?Document21 pagesWhat Is Information Retrieval (IR) ?Hussain SaeedNo ratings yet
- DIAZ COLLEGE - PrelimDocument5 pagesDIAZ COLLEGE - PrelimKhim KimNo ratings yet
- Lesson Plan in Disciplines and Ideas in The Applied Social SciencesDocument6 pagesLesson Plan in Disciplines and Ideas in The Applied Social SciencesChing Laguna Dacayana-AlvarezNo ratings yet
- Reviewing Books and ArticlesDocument5 pagesReviewing Books and ArticlesAma CandraNo ratings yet
- DLL English 5 q1 w10Document5 pagesDLL English 5 q1 w10janet juntillaNo ratings yet
- Critical Discourse Analysis: Norman FaircloughDocument28 pagesCritical Discourse Analysis: Norman Faircloughemo_transNo ratings yet
- Parte 1 - Introducción - Rigour and Complexity - KINCHELOEDocument22 pagesParte 1 - Introducción - Rigour and Complexity - KINCHELOEYaimar MontoyaNo ratings yet
- Chem Eng 3P4 Assignment 6 DUE 5:00pm Fri 04/01/11Document4 pagesChem Eng 3P4 Assignment 6 DUE 5:00pm Fri 04/01/11Victoria HillierNo ratings yet
- Content Analysis in International RelationsDocument12 pagesContent Analysis in International RelationsNUR MAIDIZAH BINTI MAIDINNo ratings yet
- Lesson Plan Affirmative and Negative Form of To BeDocument5 pagesLesson Plan Affirmative and Negative Form of To BeMaidy Lisseth Villamizar ArrietaNo ratings yet
- Small Collection of Ebook About Learning English TOEFLDocument3 pagesSmall Collection of Ebook About Learning English TOEFLDax SeutterNo ratings yet
- Lss%20 Lecture%20 NotesDocument81 pagesLss%20 Lecture%20 NotesAGBOLOSU MAWUSENo ratings yet
- Roman Numerals LPDocument5 pagesRoman Numerals LPapi-315857509No ratings yet
- Current Trend in PsychologyDocument3 pagesCurrent Trend in PsychologyRobia RanaNo ratings yet
- Detailed Lesson PlannnnnnDocument9 pagesDetailed Lesson PlannnnnnJohn Argie Pascual GuansingNo ratings yet
- THINK L4 Unit 6 Grammar BasicDocument2 pagesTHINK L4 Unit 6 Grammar Basicniyazi polatNo ratings yet
- Cosc7312 Test RevisionDocument3 pagesCosc7312 Test Revisionapi-281655169No ratings yet
- Elementary - TBDocument131 pagesElementary - TBBalázs László89% (9)
- Sample 3Document159 pagesSample 3Sarah Abu TalibNo ratings yet
- Instructional Plan - Grade 8 - 2nd Quarter-2018-19Document14 pagesInstructional Plan - Grade 8 - 2nd Quarter-2018-19adonis bucoy100% (2)
- Emilio Jose Sr. Elementary School: Activity Design I. General InformationDocument3 pagesEmilio Jose Sr. Elementary School: Activity Design I. General InformationRichie Macasarte100% (2)
- Evaluative CommentaryDocument2 pagesEvaluative CommentaryNatasha Yana100% (2)
- Present Perfect TenseDocument2 pagesPresent Perfect TenseNur Infita KameliaNo ratings yet
- Milton EricksonDocument5 pagesMilton Ericksonosher26100% (2)
- 7 Research DesignDocument21 pages7 Research DesignRans-Nana Kwame-BoatengNo ratings yet
- Leadership Behavior and MotivationDocument35 pagesLeadership Behavior and MotivationNUR ATIQAHNo ratings yet
- Langer Representation and Emotion in MusicDocument10 pagesLanger Representation and Emotion in MusicMarc BrooksNo ratings yet