Download as docx, pdf, or txt
You might also like
- Metode Pekerjaan ShellDocument8 pagesMetode Pekerjaan Shellgintangsulung100% (1)
- Installation Guide Harmonik ENG 2020Document18 pagesInstallation Guide Harmonik ENG 2020Константин СиняковNo ratings yet
- Brgy Villa Belen POW and DCE FinalDocument12 pagesBrgy Villa Belen POW and DCE FinalJopheth RelucioNo ratings yet
- The Steps Install of LF3015GAR Laser MachineDocument162 pagesThe Steps Install of LF3015GAR Laser MachineIgor PiresNo ratings yet
- AURETR010Document6 pagesAURETR010Muhammad Waseem0% (1)
- BBU Quick Installation Guide (V100R005C10 - 04) (PDF) - ENDocument7 pagesBBU Quick Installation Guide (V100R005C10 - 04) (PDF) - ENCarlitos GuevaraNo ratings yet
- StepsDocument2 pagesStepsnourbadr919No ratings yet
- G Force InstructionsDocument17 pagesG Force Instructions주형준No ratings yet
- Ewi 01Document13 pagesEwi 01Muhammad SolihinNo ratings yet
- Methods of Procedure (MOP)Document6 pagesMethods of Procedure (MOP)Ronald AllanNo ratings yet
- SFS CP 03 9×14 H 3m) Installation GuideDocument9 pagesSFS CP 03 9×14 H 3m) Installation GuidePaola MassardoNo ratings yet
- ASUS F7SR Chapter 03-v1.0Document24 pagesASUS F7SR Chapter 03-v1.0Jeovando BatistaNo ratings yet
- Cable Preparation Guide For Connecting MOTOTRBO Radio As A Control Station To The Radioserver (Using HLN9457 Connector and PMKN4147A Programming Cable)Document5 pagesCable Preparation Guide For Connecting MOTOTRBO Radio As A Control Station To The Radioserver (Using HLN9457 Connector and PMKN4147A Programming Cable)SmartPTTNo ratings yet
- CHIKO Installation Guide Concrete Roof Open FieldDocument9 pagesCHIKO Installation Guide Concrete Roof Open FieldGuille ParejoNo ratings yet
- MNL Solax Chint 3-Phase Dtsu666-Ct-En-1Document2 pagesMNL Solax Chint 3-Phase Dtsu666-Ct-En-1sarlasotecNo ratings yet
- Connection Guide of The MOTOTRBO Radio To The Radioserver As A Control Station (Using The PMKN4147A Programming Cable and A Cable With The HLN9457 Connector)Document10 pagesConnection Guide of The MOTOTRBO Radio To The Radioserver As A Control Station (Using The PMKN4147A Programming Cable and A Cable With The HLN9457 Connector)SmartPTT100% (1)
- Single 100W Solar Panel Off-Grid Installation: 10 Amp PWM Charge ControllerDocument16 pagesSingle 100W Solar Panel Off-Grid Installation: 10 Amp PWM Charge ControllerTed RustNo ratings yet
- QG. Automower® Aspire R4. 2023Document4 pagesQG. Automower® Aspire R4. 2023Tarek Abdel-FattahNo ratings yet
- Vermona ER9 MIDI Interface: User and Installation GuideDocument18 pagesVermona ER9 MIDI Interface: User and Installation GuideChristophe Van HuffelNo ratings yet
- Optimal State Feedback Control (Ball and Beam) : by Carion PeltonDocument20 pagesOptimal State Feedback Control (Ball and Beam) : by Carion PeltonRaushan KumarNo ratings yet
- User Manual of Laser Master 2 Laser Engraver: Dongguan Ortur Intelligent Technologies Co., LTDDocument22 pagesUser Manual of Laser Master 2 Laser Engraver: Dongguan Ortur Intelligent Technologies Co., LTDfrancois xavier chizeNo ratings yet
- Installation Instructions: For EVS Security SystemsDocument14 pagesInstallation Instructions: For EVS Security SystemsMichel TanusNo ratings yet
- Galaxy Series Machine Install Elevating Capping System InstructionDocument10 pagesGalaxy Series Machine Install Elevating Capping System InstructiondarkenelNo ratings yet
- Installation Introduction of Mounting BracketsDocument2 pagesInstallation Introduction of Mounting Bracketsroberto_llanaNo ratings yet
- Wiring Guidelines GEWDocument1 pageWiring Guidelines GEWJohnson ShodipoNo ratings yet
- Robot CarDocument38 pagesRobot Carsaeeed3No ratings yet
- Microstrip Patch AntennaDocument5 pagesMicrostrip Patch Antennahung nguyenNo ratings yet
- Nota Kursus 1Document21 pagesNota Kursus 1HAIDABINTECHNo ratings yet
- Link Piggyback FM2 ECU Tuning PiggybackDocument27 pagesLink Piggyback FM2 ECU Tuning PiggybackclistingacctNo ratings yet
- Turn Signals 8.1: RemovalDocument8 pagesTurn Signals 8.1: RemovalMarcelo Ramos SaldanhaNo ratings yet
- Installation Guide - TLG7921M Series V1.2Document12 pagesInstallation Guide - TLG7921M Series V1.2Marthin KingNo ratings yet
- Installation and Service Instructions FOR Model Ez1 Echo IntercomsDocument12 pagesInstallation and Service Instructions FOR Model Ez1 Echo IntercomsOsvaldoNo ratings yet
- Installation Manual EditedDocument24 pagesInstallation Manual EditedarunNo ratings yet
- Engineering ProjectDocument14 pagesEngineering ProjectHannah MohamadNo ratings yet
- Unitronics Devices and RS485Document10 pagesUnitronics Devices and RS485HumbertoNo ratings yet
- AN5006-20 Small-Sized Integrated Access Device Quick Installation Guide (Version D)Document26 pagesAN5006-20 Small-Sized Integrated Access Device Quick Installation Guide (Version D)JeffersonFelixNo ratings yet
- Rahul Sharma H14032 (BSC IT)Document45 pagesRahul Sharma H14032 (BSC IT)Harsh ChaudharyNo ratings yet
- Laboratory ActivityDocument2 pagesLaboratory ActivityChristian DeanNo ratings yet
- HMS-2000-4T Quick Installation Guide: 1. AccessoriesDocument2 pagesHMS-2000-4T Quick Installation Guide: 1. AccessoriesOscar Fernando Roque PardoNo ratings yet
- JNTUA Computer Networks Lab Manual R20Document58 pagesJNTUA Computer Networks Lab Manual R20Chandu SekharNo ratings yet
- Non-Contact Voltage Detector - MAKEDocument20 pagesNon-Contact Voltage Detector - MAKEJoseph Kerby J. NavaNo ratings yet
- Swing Gate Opener PKM-C02 User's ManualDocument11 pagesSwing Gate Opener PKM-C02 User's ManualRap Anthony0% (1)
- moxonMFJ-1890 Manual REV 1ADocument12 pagesmoxonMFJ-1890 Manual REV 1AEnrique Benitez100% (1)
- Rotary Encoder PDFDocument3 pagesRotary Encoder PDFRayne RangelNo ratings yet
- Assembly GuideDocument30 pagesAssembly GuideMarek PolákNo ratings yet
- How To Check A MOSFET Using A Digital Multimeter - Homemade Circuit Designs Just For YouDocument2 pagesHow To Check A MOSFET Using A Digital Multimeter - Homemade Circuit Designs Just For YouvishiwizardNo ratings yet
- MC4 Connector Fitting InstructionsDocument4 pagesMC4 Connector Fitting InstructionsParesh LilaNo ratings yet
- Computers and ElectronicsDocument17 pagesComputers and ElectronicsIsaac GNo ratings yet
- 3D Printed Hovercraft ManualDocument30 pages3D Printed Hovercraft Manualdfdf dgfdNo ratings yet
- Installation and Commissioning GuideDocument68 pagesInstallation and Commissioning GuidebettyNo ratings yet
- Telefono Como Micro de WalkieDocument8 pagesTelefono Como Micro de WalkieJuanma MarinNo ratings yet
- ZXMW NR8961 (V2.04.04A2) Hardware Installation Guide 2Document57 pagesZXMW NR8961 (V2.04.04A2) Hardware Installation Guide 2Esmail FathyNo ratings yet
- Shyam Pal Dogra H13539 (BCA)Document45 pagesShyam Pal Dogra H13539 (BCA)Harsh ChaudharyNo ratings yet
- Electric Camper Jack Installation and Operating InstructionsDocument11 pagesElectric Camper Jack Installation and Operating InstructionsStephen RivettNo ratings yet
- Robot Car Instructions PDFDocument21 pagesRobot Car Instructions PDFAmin Iqmal100% (2)
- Manual MRL 7 2.33.00Document195 pagesManual MRL 7 2.33.00Andres HatumNo ratings yet
- Ruddermaster: Rudder Angle Indicator Installation and Maintenance InstructionsDocument4 pagesRuddermaster: Rudder Angle Indicator Installation and Maintenance InstructionsAldrine Dela CruzNo ratings yet
- ESP8266 WIFI CAR V1-AssemblyDocument21 pagesESP8266 WIFI CAR V1-AssemblyHugo AstorgaNo ratings yet
- Adding Cruise Control MK 1Document12 pagesAdding Cruise Control MK 1sebifuente100% (5)
- Trilogy of Connectors: Basic Principles and Connector Design ExplanationsFrom EverandTrilogy of Connectors: Basic Principles and Connector Design ExplanationsRating: 5 out of 5 stars5/5 (1)
- Wireless Transmission of Photographs Second Edition, Revised and Enlarged 1919From EverandWireless Transmission of Photographs Second Edition, Revised and Enlarged 1919No ratings yet
- Fundado Rev.2Document12 pagesFundado Rev.2Jopheth RelucioNo ratings yet
- A.Menu of Sub Projects B.Negative List Sub Projects C.Recommended Sub Projects D. Sub Project CategoryDocument15 pagesA.Menu of Sub Projects B.Negative List Sub Projects C.Recommended Sub Projects D. Sub Project CategoryJopheth RelucioNo ratings yet
- CLUSTER 1-Magsaysay - DceDocument6 pagesCLUSTER 1-Magsaysay - DceJopheth RelucioNo ratings yet
- Pow, Dce, WS, JirDocument7 pagesPow, Dce, WS, JirJopheth RelucioNo ratings yet
- Contract ImplementationDocument17 pagesContract ImplementationJopheth RelucioNo ratings yet
- Elevation Details: NTS ScaleDocument1 pageElevation Details: NTS ScaleJopheth RelucioNo ratings yet
- PG 21-916 - CANAMAN TECH NOL REVIEW NotesDocument2 pagesPG 21-916 - CANAMAN TECH NOL REVIEW NotesJopheth RelucioNo ratings yet
- Pow Basiad ConstDocument12 pagesPow Basiad ConstJopheth RelucioNo ratings yet
- Rebar Detail (Draft) - Model - PDF 1 1Document1 pageRebar Detail (Draft) - Model - PDF 1 1Jopheth RelucioNo ratings yet
- RFQ Format ExampleDocument6 pagesRFQ Format ExampleJopheth RelucioNo ratings yet
- Elevation Details: Construction of Reinforced Concrete FootbridgeDocument1 pageElevation Details: Construction of Reinforced Concrete FootbridgeJopheth RelucioNo ratings yet
- Coa Goods & Services-BiddingDocument3 pagesCoa Goods & Services-BiddingJopheth Relucio100% (1)
- Bar Bending Schedule For SlabDocument6 pagesBar Bending Schedule For SlabJopheth RelucioNo ratings yet
- Status of Lifeline and Critical FacilitiesDocument27 pagesStatus of Lifeline and Critical FacilitiesJopheth RelucioNo ratings yet
- City of San Marcos: Street Lighting StandardsDocument22 pagesCity of San Marcos: Street Lighting StandardsJopheth RelucioNo ratings yet
- Construction of Road, Purok 2, Daang Tesda, Barangay San Francisco, Bulakan, BulacanDocument11 pagesConstruction of Road, Purok 2, Daang Tesda, Barangay San Francisco, Bulakan, BulacanJopheth RelucioNo ratings yet
- 3rd FloorDocument1 page3rd FloorJopheth RelucioNo ratings yet
- Slaughterhouse - Condemnation PitDocument24 pagesSlaughterhouse - Condemnation PitJopheth RelucioNo ratings yet
- Slaughterhouse-Access-Road (Final)Document24 pagesSlaughterhouse-Access-Road (Final)Jopheth RelucioNo ratings yet
- Slaughterhouse - Pump House (Final)Document54 pagesSlaughterhouse - Pump House (Final)Jopheth RelucioNo ratings yet
- Epson L1455 Exploded DiagramsDocument8 pagesEpson L1455 Exploded DiagramsVladPKL2No ratings yet
- Simple Machines Worksheet - : AnswersDocument1 pageSimple Machines Worksheet - : AnswersBHAWANA SINGH0% (1)
- CPP 801 Manual OnlineDocument9 pagesCPP 801 Manual OnlineMark Nicko ZablanNo ratings yet
- Garrick Herbert CatalogueDocument50 pagesGarrick Herbert CatalogueAndy LNo ratings yet
- Tramming Circuits: Service Training Manual CM 760/780Document4 pagesTramming Circuits: Service Training Manual CM 760/780victor laraNo ratings yet
- Company Profile Sumou Al AwaelDocument11 pagesCompany Profile Sumou Al AwaelexcellencefoundationNo ratings yet
- Us - 3Document2 pagesUs - 3RISKA.SILVIANo ratings yet
- 0455 675 101 GBDocument26 pages0455 675 101 GBramadan.seydNo ratings yet
- Work Programme For Unpaved Roads of Mityana - Busunju (28.452Km) Contract No. UNRA/WRKS/2018-19/00024/05Document2 pagesWork Programme For Unpaved Roads of Mityana - Busunju (28.452Km) Contract No. UNRA/WRKS/2018-19/00024/05gyagenda jumahNo ratings yet
- Assistant Automatic RiflemanDocument9 pagesAssistant Automatic RiflemanStefano D'Amico100% (1)
- Pentax CCTV CatalogDocument60 pagesPentax CCTV Catalogziad2375No ratings yet
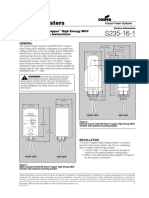
- Surge Arresters: Varistar Storm Trapper High Energy Mov Arrester Installation InstructionsDocument2 pagesSurge Arresters: Varistar Storm Trapper High Energy Mov Arrester Installation InstructionscrcruzpNo ratings yet
- Datasheet - Live: 20 MM, PVC-2LXT-L5, - 2LXT-LD5Document2 pagesDatasheet - Live: 20 MM, PVC-2LXT-L5, - 2LXT-LD5dayne81sNo ratings yet
- NRN KNITTING & GARMENTS LTD - 7TH FUiN Electrical OA - 30072019Document20 pagesNRN KNITTING & GARMENTS LTD - 7TH FUiN Electrical OA - 30072019Faruque SathiNo ratings yet
- Saudi Arabian Oil Company: NotesDocument1 pageSaudi Arabian Oil Company: NotesWael ChouchaniNo ratings yet
- Introduction To Chopping BoardDocument8 pagesIntroduction To Chopping BoardAshraf ZhafryNo ratings yet
- Final Drive Transmission 9030bDocument3 pagesFinal Drive Transmission 9030bCaroline Rosa100% (1)
- BOQ-051-2021-PT Bangun Bejana Baja - Project LPG Dumai Safety ShowerDocument1 pageBOQ-051-2021-PT Bangun Bejana Baja - Project LPG Dumai Safety ShowerTrimitraNo ratings yet
- P&ID P00bDocument1 pageP&ID P00bEduardo RodríguezNo ratings yet
- Addis Ababa University Addis Ababa Institute of Technology School of Civil and Environmental Engineering Construction Equipment (Ceng 5213)Document11 pagesAddis Ababa University Addis Ababa Institute of Technology School of Civil and Environmental Engineering Construction Equipment (Ceng 5213)Amy MengistuNo ratings yet
- 1SBH141001R8422 N22e 110v 50hz 110 120v 60hzDocument4 pages1SBH141001R8422 N22e 110v 50hz 110 120v 60hzIsrael AldabaNo ratings yet
- Minox 071 Tube 2019Document1 pageMinox 071 Tube 2019MBI Heineken RonaldNo ratings yet
- 2019 Chevrolet Blazer X3 (LCV)Document4 pages2019 Chevrolet Blazer X3 (LCV)PANHA MENNo ratings yet
- Sl. No Equipment List ModelDocument3 pagesSl. No Equipment List ModelJamal Mohamed RahamathullahNo ratings yet
- Bomba Prell - Hevy DutyDocument8 pagesBomba Prell - Hevy DutyAdolfo Lopez HernandoNo ratings yet
- DS - 20201123 - MVS6750-LV Datasheet - V1.2.2 - ENDocument2 pagesDS - 20201123 - MVS6750-LV Datasheet - V1.2.2 - ENGabooNo ratings yet
- Volvo Avtobus Manual PDFDocument148 pagesVolvo Avtobus Manual PDFRicadoNo ratings yet
- Fcu Tower 1 - 4FDocument1 pageFcu Tower 1 - 4FAsmir MemićNo ratings yet
- Screw-In RTD Temperature Probe With Plug Connector: Approvals/approval Marks (See "Technical Data")Document5 pagesScrew-In RTD Temperature Probe With Plug Connector: Approvals/approval Marks (See "Technical Data")guruh anindraNo ratings yet
- 17 Exploded View and Replacement Parts ListDocument22 pages17 Exploded View and Replacement Parts ListOFBA srlNo ratings yet