Download as pdf or txt
You might also like
- 2015 JC2 H2 Maths River Valley High School PDFDocument42 pages2015 JC2 H2 Maths River Valley High School PDFVu Quang MinhNo ratings yet
- Foundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 14Document13 pagesFoundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 14mahesh dNo ratings yet
- Lec23 PDFDocument12 pagesLec23 PDFJithinNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasdurgaraokamireddyNo ratings yet
- Foundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 12Document14 pagesFoundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 12mahesh dNo ratings yet
- 1 20 Ito Calculus and BoydDocument10 pages1 20 Ito Calculus and BoydshrutigarodiaNo ratings yet
- Advanced Mathematical Techniques in Chemical Engineering Prof. S. de Department of Chemical Engineering Indian Institute of Technology, KharagpurDocument23 pagesAdvanced Mathematical Techniques in Chemical Engineering Prof. S. de Department of Chemical Engineering Indian Institute of Technology, KharagpurGaurav KumarNo ratings yet
- Lec 15Document15 pagesLec 15daynongNo ratings yet
- 9 Weak Form To Algebraic Equations OverviewDocument2 pages9 Weak Form To Algebraic Equations OverviewJhuliani CristinaNo ratings yet
- Lec 1Document48 pagesLec 1aravinda reddyNo ratings yet
- Lec 2Document13 pagesLec 2RAHUL NARANGNo ratings yet
- Lec 22Document13 pagesLec 22Jamvanti PandeyNo ratings yet
- Lec 2Document9 pagesLec 2Himanshu RanjanNo ratings yet
- Lec 22Document19 pagesLec 22AmanNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14Document21 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14mahendranNo ratings yet
- Lec 21Document12 pagesLec 21themaker1602No ratings yet
- Lec 12Document12 pagesLec 12Seshan SahooNo ratings yet
- Lec 20Document29 pagesLec 20shubhamNo ratings yet
- Lec 31Document23 pagesLec 31rajNo ratings yet
- Classical Mechanics: From Newtonian To Lagrangian FormulationDocument9 pagesClassical Mechanics: From Newtonian To Lagrangian Formulationchirag jainNo ratings yet
- PerturbationDocument16 pagesPerturbationandrew9180No ratings yet
- Foundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 10Document11 pagesFoundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 10Shahzaib Anwar OffNo ratings yet
- Lec7 PDFDocument16 pagesLec7 PDFRaviNo ratings yet
- Lec 9Document27 pagesLec 9Arshad AliNo ratings yet
- NPTEL FEM Lec3Document42 pagesNPTEL FEM Lec3EliNo ratings yet
- MITOCW - MIT18 - 02SCF10Rec - 40 - 300k: Joel LewisDocument4 pagesMITOCW - MIT18 - 02SCF10Rec - 40 - 300k: Joel LewisStephanie Carolina Cely RodriguezNo ratings yet
- Lec21 PDFDocument17 pagesLec21 PDFJamvanti PandeyNo ratings yet
- Finite Element Method Prof. C.S. Upadhyay Department of Mechanical Engineering Indian Institute of Technology, KanpurDocument27 pagesFinite Element Method Prof. C.S. Upadhyay Department of Mechanical Engineering Indian Institute of Technology, KanpurabimanaNo ratings yet
- Lec14 PDFDocument21 pagesLec14 PDFAbhishek AroraNo ratings yet
- Modelo Distribuidor Assessment of Discretisation Schemes 23Document10 pagesModelo Distribuidor Assessment of Discretisation Schemes 23Jose Marval RodriguezNo ratings yet
- Basic Quantum Mechanics Prof. Ajoy Ghatak Department of Physics Indian Institute of Technology, DelhiDocument22 pagesBasic Quantum Mechanics Prof. Ajoy Ghatak Department of Physics Indian Institute of Technology, DelhiUnknown 123No ratings yet
- Lec 12Document33 pagesLec 12Arun GoyalNo ratings yet
- Foundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 15Document14 pagesFoundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 15mahesh dNo ratings yet
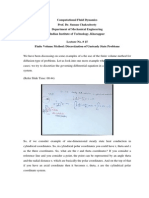
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurDocument13 pagesComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurSubhendu MaityNo ratings yet
- Lec20 PDFDocument24 pagesLec20 PDFmahendranNo ratings yet
- Unit 3 Cubic and Biquadratic Equations: StructureDocument37 pagesUnit 3 Cubic and Biquadratic Equations: Structuregirish_shanker2000No ratings yet
- Foundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 09Document9 pagesFoundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 09Shahzaib Anwar OffNo ratings yet
- Lec 3Document17 pagesLec 3RAHUL NARANGNo ratings yet
- pr1TLyPyDw PDFDocument4 pagespr1TLyPyDw PDFالديزل الجراديNo ratings yet
- Lec 5Document24 pagesLec 5PRAKASH K MNo ratings yet
- Multivariable Calculus Dr. S. K. Gupta Department of Mathematics Indian Institute of Technology, Roorkee Lecture - 09 Chain Rule-IDocument10 pagesMultivariable Calculus Dr. S. K. Gupta Department of Mathematics Indian Institute of Technology, Roorkee Lecture - 09 Chain Rule-IAnu DasNo ratings yet
- Lec 5Document23 pagesLec 5abimanaNo ratings yet
- Lec 04Document9 pagesLec 04JAGDISH SINGH MEHTANo ratings yet
- Trigonometry EquationsDocument4 pagesTrigonometry Equationsapi-150536296No ratings yet
- N The Integration of A Differential Equation by Finite Differences, Which Contains The Theory of Recurring Differences.Document23 pagesN The Integration of A Differential Equation by Finite Differences, Which Contains The Theory of Recurring Differences.PrevalisNo ratings yet
- QdbkvD4N UsDocument17 pagesQdbkvD4N UsTheoNo ratings yet
- Theoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleDocument12 pagesTheoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleHow to do anything By HimanshuNo ratings yet
- MATH219 Lecture 1Document16 pagesMATH219 Lecture 1Harun GölükcüNo ratings yet
- Lec 25Document11 pagesLec 25juneedyawarNo ratings yet
- Lec4 PDFDocument21 pagesLec4 PDFElisée NdjabuNo ratings yet
- Lec 32Document38 pagesLec 32Ali RajaNo ratings yet
- Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 3 Dynamics of SDOF StructureDocument19 pagesStructural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 3 Dynamics of SDOF StructureMahesh Kumar sukhadiyaNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29Document30 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29mahendranNo ratings yet
- Lec 3Document7 pagesLec 3Pramod KulkarniNo ratings yet
- Lec 2Document28 pagesLec 2Arshad AliNo ratings yet
- Finite Element Method Prof. C. S. Upadhyay Department of Mechanical Engineering Indian Institute of Technology, KanpurDocument24 pagesFinite Element Method Prof. C. S. Upadhyay Department of Mechanical Engineering Indian Institute of Technology, KanpurabimanaNo ratings yet
- Aero Elasticity Prof. C. V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 23Document24 pagesAero Elasticity Prof. C. V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 23Anonymous 8f2veZfNo ratings yet
- TRVS5 Wo 9 Lo MDocument4 pagesTRVS5 Wo 9 Lo MLuca SebastianNo ratings yet
- Attacking Problems in Logarithms and Exponential FunctionsFrom EverandAttacking Problems in Logarithms and Exponential FunctionsRating: 5 out of 5 stars5/5 (1)
- Lec13 PDFDocument15 pagesLec13 PDFJithinNo ratings yet
- Lec23 PDFDocument12 pagesLec23 PDFJithinNo ratings yet
- Lec 12Document10 pagesLec 12JithinNo ratings yet
- Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 31 SensorsDocument16 pagesRobotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 31 SensorsJithinNo ratings yet
- Lec30 PDFDocument13 pagesLec30 PDFJithinNo ratings yet
- Divisibility Rules & DivisionDocument14 pagesDivisibility Rules & DivisionJithinNo ratings yet
- Hydraulic Circuit DesignDocument20 pagesHydraulic Circuit DesignJithinNo ratings yet
- Statement and ArgumentsDocument12 pagesStatement and ArgumentsJithinNo ratings yet
- Abstract AlgebraDocument3 pagesAbstract AlgebraAnkan PalNo ratings yet
- Vector Mechanics For Engineers: Dynamics: R DR V T DTDocument11 pagesVector Mechanics For Engineers: Dynamics: R DR V T DTJoshua0% (1)
- 2003 MC SolutionsDocument30 pages2003 MC SolutionsFlame_Haze7No ratings yet
- Borobudur Timescapes Idham Bachtiar SetiadiDocument277 pagesBorobudur Timescapes Idham Bachtiar SetiadiBinar Asri LestariNo ratings yet
- Saint Joseph Catholic School-Adama: Grade 11 Physics Worksheet April 2012 (2020)Document3 pagesSaint Joseph Catholic School-Adama: Grade 11 Physics Worksheet April 2012 (2020)Nardos AlemayewNo ratings yet
- Lesson Plan-Law of SinesDocument6 pagesLesson Plan-Law of Sinesapi-284750579100% (8)
- Vector Power in Alternating-Current CircuitsDocument35 pagesVector Power in Alternating-Current CircuitselectrosciNo ratings yet
- Soja, Edward ThirdsapceDocument173 pagesSoja, Edward ThirdsapceJhonatan Gutierrez100% (1)
- Pre-Calculus - Module 1-Conic SectionsDocument11 pagesPre-Calculus - Module 1-Conic SectionsKharl Ace Asis50% (2)
- PHY01Document66 pagesPHY01Jason DemdamNo ratings yet
- VelocityDocument27 pagesVelocitymjdemaalaNo ratings yet
- Assignment in MechanicsDocument4 pagesAssignment in MechanicsMarvin Bryant MedinaNo ratings yet
- Chapter 04 - Acceleration Analysis of LinkagesDocument19 pagesChapter 04 - Acceleration Analysis of Linkagesnigatudesta21No ratings yet
- (WENTWORTH) Textbook-Plane Geometry 1898Document264 pages(WENTWORTH) Textbook-Plane Geometry 1898Luiz Ponce Alonso Ponce100% (1)
- Free Keyboard Shortcuts (WIN) : Number PadDocument1 pageFree Keyboard Shortcuts (WIN) : Number PadLeonardo AguileraNo ratings yet
- Mathopoly PDFDocument25 pagesMathopoly PDFAzeryna MikeNo ratings yet
- Lec 3 Rigid Body MotionDocument92 pagesLec 3 Rigid Body Motiondd23015No ratings yet
- Samson Takele TassewDocument122 pagesSamson Takele TassewAlaa ElsisiNo ratings yet
- PDE Notes Tao - PsDocument239 pagesPDE Notes Tao - PsYusuf HaqiqzaiNo ratings yet
- Grashof's LawDocument10 pagesGrashof's LawMihir MehanNo ratings yet
- ManuscriptDocument7 pagesManuscriptCoyo TitoNo ratings yet
- EGD Objective Type Quiz Questions With HintsDocument2 pagesEGD Objective Type Quiz Questions With Hintsvipsdgr850% (2)
- Group StudyDocument5 pagesGroup StudyRex LopezNo ratings yet
- By Alaa E - Elwi and Terry M. Hrudey, Members, ASCE ABSTRACT: The Geometric Relations Required For An Embedded Finite Element RepDocument15 pagesBy Alaa E - Elwi and Terry M. Hrudey, Members, ASCE ABSTRACT: The Geometric Relations Required For An Embedded Finite Element RepJorge PalominoNo ratings yet
- The Complete Book of Drawing Techniques A Complete Guide For The Artist - Peter StanyerDocument8 pagesThe Complete Book of Drawing Techniques A Complete Guide For The Artist - Peter StanyerCésar NunesNo ratings yet
- Script Real Soccer GLHDocument594 pagesScript Real Soccer GLHGabriel HenriqueNo ratings yet
- Wythoffian Uniform Tilings4Document2 pagesWythoffian Uniform Tilings4Daniel GregorioNo ratings yet
- 05 - MensurationDocument28 pages05 - Mensurationthinkiit88% (8)
- An Introduction To Differential Geometry Through Computation PDFDocument225 pagesAn Introduction To Differential Geometry Through Computation PDFALI RAZA100% (1)