Download as docx, pdf, or txt
You might also like
- Attachment Disturbances in Adults Treatment For Comprehensive Repair (Etc.) (Z-Library)Document477 pagesAttachment Disturbances in Adults Treatment For Comprehensive Repair (Etc.) (Z-Library)fa ab100% (8)
- Haccp PlanDocument1 pageHaccp PlanFrance Cedrick GarciaNo ratings yet
- Hbhe3103 - Healthy Life StyleDocument11 pagesHbhe3103 - Healthy Life StyleSimon RajNo ratings yet
- Final Draft Ifp 2018 PDFDocument443 pagesFinal Draft Ifp 2018 PDFhusnasyahidahNo ratings yet
- Simulation and Analysis of A Rube Goldberg Machine: Covyn Yong Keen Lok ME 0340868Document4 pagesSimulation and Analysis of A Rube Goldberg Machine: Covyn Yong Keen Lok ME 0340868Covyn YongNo ratings yet
- Me AppendixDocument4 pagesMe AppendixHue Wen HaoNo ratings yet
- Final Project - Com1005 PDFDocument4 pagesFinal Project - Com1005 PDFapi-435171468No ratings yet
- Project Book Exoskeleton 2.2Document9 pagesProject Book Exoskeleton 2.2Daan SandersNo ratings yet
- Meeting Minutes 6Document2 pagesMeeting Minutes 6api-19984749No ratings yet
- Report On ApplyDocument5 pagesReport On Applyapi-302170302No ratings yet
- Final Project (15%) 1092 Business English: (Team Problem Solvers)Document6 pagesFinal Project (15%) 1092 Business English: (Team Problem Solvers)陳浚維No ratings yet
- A Project Report: in Partial Fulfilment For The Award of The DegreeDocument32 pagesA Project Report: in Partial Fulfilment For The Award of The DegreeGayathri PrakashNo ratings yet
- Adarsh LogbookDocument25 pagesAdarsh LogbookAnurag pradhanNo ratings yet
- Designing by DrawingDocument176 pagesDesigning by DrawingJesus FernandezNo ratings yet
- Technique 3Document9 pagesTechnique 3Wieson ResultanNo ratings yet
- Project Report Grp-90Document30 pagesProject Report Grp-90GOURAV MAKURNo ratings yet
- Est200: Design and Engineering: Part ADocument12 pagesEst200: Design and Engineering: Part AMereen ThomasNo ratings yet
- Emotion Based Music SystemDocument64 pagesEmotion Based Music Systemchikkapriyanka61No ratings yet
- Ve Lab Manual 2023Document15 pagesVe Lab Manual 20237hhbwq8ptfNo ratings yet
- Group 4 - Covyn Yong Keen LokDocument48 pagesGroup 4 - Covyn Yong Keen LokCovyn YongNo ratings yet
- Projectile Unit Plan and CalendarDocument6 pagesProjectile Unit Plan and Calendarapi-397479049No ratings yet
- Meeting Minutes 5Document2 pagesMeeting Minutes 5api-1998474980% (5)
- CEersel Research PaperDocument114 pagesCEersel Research PaperSarganisha BNo ratings yet
- AS Media Studies Unit G322aDocument18 pagesAS Media Studies Unit G322aMs-CalverNo ratings yet
- Voice Emoion RecognitionDocument43 pagesVoice Emoion RecognitionSparsh GoelNo ratings yet
- System Analysis & DesignDocument2 pagesSystem Analysis & DesignMuktinath rajbanshiNo ratings yet
- Week 6 Tutorial Notes2017 - v2 PDFDocument4 pagesWeek 6 Tutorial Notes2017 - v2 PDFAlfredo E. Zamudio AcostaNo ratings yet
- From Film To Architecture 3/3Document10 pagesFrom Film To Architecture 3/3RichardNo ratings yet
- MECH 4330.19 - A2 - Week 2 Admin PDFDocument7 pagesMECH 4330.19 - A2 - Week 2 Admin PDFAtsushiNo ratings yet
- Industry HygieneDocument12 pagesIndustry HygieneIman Hifni Campro Gtuned RacingNo ratings yet
- Modelling, Analysis and Development of Progressive Die For Seat RailDocument9 pagesModelling, Analysis and Development of Progressive Die For Seat RailVineela ChNo ratings yet
- Kaizen Done The IE Way Using Operations AnalysisDocument11 pagesKaizen Done The IE Way Using Operations AnalysisallahnawazksadozaiNo ratings yet
- Modelling, Analysis and Development of Progressive Die For Seat RailDocument9 pagesModelling, Analysis and Development of Progressive Die For Seat RailVineela ChNo ratings yet
- DR - Apoorva Joshi - DT - UNIT3Document191 pagesDR - Apoorva Joshi - DT - UNIT3Crazy DPS YTNo ratings yet
- Motion StudyDocument27 pagesMotion StudyMulat TeshomeNo ratings yet
- ORK Reakdown Tructure: Unit Name /number (Title of The Research Project)Document7 pagesORK Reakdown Tructure: Unit Name /number (Title of The Research Project)Palak ShahNo ratings yet
- Revision Matrix - LigtasGISDocument2 pagesRevision Matrix - LigtasGISMOHAMMAD FAHEEM AZISNo ratings yet
- Task 1Document10 pagesTask 1Soe Moe AungNo ratings yet
- Ho Yi Ying, Lau Hong Ming, Low Zi Chin, Ryan Chew Chun Nan, Sharleen Yeo YeeDocument2 pagesHo Yi Ying, Lau Hong Ming, Low Zi Chin, Ryan Chew Chun Nan, Sharleen Yeo YeesharleenNo ratings yet
- Birla Institute of Technology & Science, Pilani Course Handout Part A: Content DesignDocument3 pagesBirla Institute of Technology & Science, Pilani Course Handout Part A: Content DesignUmesh BhadaleNo ratings yet
- C 11810 DCFDocument4 pagesC 11810 DCFelsonpaulNo ratings yet
- SWE Course OutlineDocument3 pagesSWE Course OutlineLëmä FeyTitaNo ratings yet
- CH - 3 IA Facilitators GuideDocument11 pagesCH - 3 IA Facilitators GuideLegesse EshetuNo ratings yet
- Project OneDocument25 pagesProject OneMING CHUNG 01No ratings yet
- Exo-Skeleton (Chairless Chair) : A Project Report OnDocument29 pagesExo-Skeleton (Chairless Chair) : A Project Report OnbikiNo ratings yet
- Activity Recording and Exam AidsDocument6 pagesActivity Recording and Exam Aidsakshay jawaleNo ratings yet
- OM MBA236 Courseplan Batch 2021 v1.2Document23 pagesOM MBA236 Courseplan Batch 2021 v1.2Niya ThomasNo ratings yet
- Taichii Ohno Circle Rev 2Document27 pagesTaichii Ohno Circle Rev 2dhanuNo ratings yet
- Time and Motion Syllabusfall2020 2021Document6 pagesTime and Motion Syllabusfall2020 2021Gfzz TfszNo ratings yet
- Technical Report Format (MID SEMESTER 2021)Document13 pagesTechnical Report Format (MID SEMESTER 2021)Jay ParmaniNo ratings yet
- Lesson 1Document10 pagesLesson 1veronica NgunziNo ratings yet
- Fundamentals of Project Management F1 Final-POM203Document308 pagesFundamentals of Project Management F1 Final-POM203Cornelius NarteyNo ratings yet
- Software Openshot Video Editor Manual OptimizedDocument54 pagesSoftware Openshot Video Editor Manual OptimizedDragan StanisavljevicNo ratings yet
- Morten Sirtse ThesisDocument63 pagesMorten Sirtse ThesisOnur FilizoğluNo ratings yet
- MEC103 Engineering Graphics 14740::jaiinder Preet Singh 4.0 0.0 0.0 4.0 Courses With Numerical and Conceptual FocusDocument5 pagesMEC103 Engineering Graphics 14740::jaiinder Preet Singh 4.0 0.0 0.0 4.0 Courses With Numerical and Conceptual FocusAjay ChauhanNo ratings yet
- Tbs M Work Breakdown StructureDocument13 pagesTbs M Work Breakdown StructureKyla Marie AmoraNo ratings yet
- Ho Yi Ying, Lau Hong Ming, Low Zi Chin, Ryan Chew Chun Nan, Sharleen Yeo YeeDocument2 pagesHo Yi Ying, Lau Hong Ming, Low Zi Chin, Ryan Chew Chun Nan, Sharleen Yeo YeesharleenNo ratings yet
- 2011 EPDE11 ThoringMueller DesignThinkingProcessModelDocument7 pages2011 EPDE11 ThoringMueller DesignThinkingProcessModelabdo kasebNo ratings yet
- PM Course OutlineDocument3 pagesPM Course OutlineAashir IqbalNo ratings yet
- Department of Computer Science and EngineeringDocument47 pagesDepartment of Computer Science and EngineeringRekhasreeGoneNo ratings yet
- Long, Susan - Newton, John - Sievers, Burkhard - Coaching in Depth - The Organizational Role Analysis Approach-Routledge (2018)Document214 pagesLong, Susan - Newton, John - Sievers, Burkhard - Coaching in Depth - The Organizational Role Analysis Approach-Routledge (2018)Malik AbedNo ratings yet
- Methodology and SeesawDocument8 pagesMethodology and SeesawCovyn YongNo ratings yet
- Classification of Tidal Power PlantDocument2 pagesClassification of Tidal Power PlantCovyn YongNo ratings yet
- School of Engineering: Subject Code: PRJ 62404 Engineering Design & AnalysisDocument23 pagesSchool of Engineering: Subject Code: PRJ 62404 Engineering Design & AnalysisCovyn YongNo ratings yet
- Mini Project Front Page 0320Document1 pageMini Project Front Page 0320Covyn YongNo ratings yet
- Introduction To Electronics and Electrical Power & Machines: Dr. Hoon Yap Yap - Hoon@taylors - Edu.my C9.25 Ext. 5251Document9 pagesIntroduction To Electronics and Electrical Power & Machines: Dr. Hoon Yap Yap - Hoon@taylors - Edu.my C9.25 Ext. 5251Covyn YongNo ratings yet
- Simulation and Analysis of A Rube Goldberg Machine: Covyn Yong Keen Lok ME 0340868Document4 pagesSimulation and Analysis of A Rube Goldberg Machine: Covyn Yong Keen Lok ME 0340868Covyn YongNo ratings yet
- Team Analysis (Week 5)Document1 pageTeam Analysis (Week 5)Covyn YongNo ratings yet
- Write The Number of Each Attempted: MLO(s) MarksDocument1 pageWrite The Number of Each Attempted: MLO(s) MarksCovyn YongNo ratings yet
- Fluid Mechanics Lecture 1 - IntroductionDocument60 pagesFluid Mechanics Lecture 1 - IntroductionCovyn YongNo ratings yet
- Computing Applications of EngineeringDocument11 pagesComputing Applications of EngineeringCovyn YongNo ratings yet
- Team Analysis (Week 4)Document1 pageTeam Analysis (Week 4)Covyn YongNo ratings yet
- Air Conditioning and Refrigeration (MEC 4413/MEC60603) : Case Study Report Marking RubricDocument2 pagesAir Conditioning and Refrigeration (MEC 4413/MEC60603) : Case Study Report Marking RubricCovyn YongNo ratings yet
- Specimen 1 To 1: Module Eng60503/Eng60504: Properties and Applications of Material Lab: Tensile TestDocument1 pageSpecimen 1 To 1: Module Eng60503/Eng60504: Properties and Applications of Material Lab: Tensile TestCovyn YongNo ratings yet
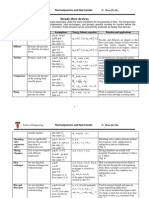
- Steady Flow Devices - For StudentsDocument4 pagesSteady Flow Devices - For StudentsCovyn YongNo ratings yet
- Specimen 1 To 1: Module Eng60503/Eng60504: Properties and Applications of Material Lab: Tensile TestDocument1 pageSpecimen 1 To 1: Module Eng60503/Eng60504: Properties and Applications of Material Lab: Tensile TestCovyn YongNo ratings yet
- Specimen 1 To 1: Module Eng60503/Eng60504: Properties and Applications of Material Lab: Tensile TestDocument1 pageSpecimen 1 To 1: Module Eng60503/Eng60504: Properties and Applications of Material Lab: Tensile TestCovyn YongNo ratings yet
- PRACTICE - Introduction To MATLAB: Please Use MATLAB Help File To Search For Information/explanationDocument3 pagesPRACTICE - Introduction To MATLAB: Please Use MATLAB Help File To Search For Information/explanationCovyn YongNo ratings yet
- Team Analysis (Week 2)Document1 pageTeam Analysis (Week 2)Covyn YongNo ratings yet
- Property Table and ChartsDocument18 pagesProperty Table and ChartsCovyn YongNo ratings yet
- SOLUTION - PRACTICE - Introduction To MATLABDocument2 pagesSOLUTION - PRACTICE - Introduction To MATLABCovyn YongNo ratings yet
- Team Analysis (Week 6)Document1 pageTeam Analysis (Week 6)Covyn YongNo ratings yet
- Post MCO Guideline For Students 12june2020Document32 pagesPost MCO Guideline For Students 12june2020Covyn YongNo ratings yet
- EvidenceDocument4 pagesEvidenceCovyn YongNo ratings yet
- Group 4 - Covyn Yong Keen LokDocument48 pagesGroup 4 - Covyn Yong Keen LokCovyn YongNo ratings yet
- PRJ 62404 Engineering Design and Analysis Final Report Module Coordinator Dr. Ku Pei XuanDocument2 pagesPRJ 62404 Engineering Design and Analysis Final Report Module Coordinator Dr. Ku Pei XuanCovyn YongNo ratings yet
- Team Analysis: School of Engineering PRJ 62404 Engineering Design and AnalysisDocument1 pageTeam Analysis: School of Engineering PRJ 62404 Engineering Design and AnalysisCovyn YongNo ratings yet
- Formulas Sample Mean Sample Variance: y y T S N N y y T S N NDocument4 pagesFormulas Sample Mean Sample Variance: y y T S N N y y T S N NCovyn YongNo ratings yet
- Team Analysis: School of Engineering PRJ 62404 Engineering Design and AnalysisDocument1 pageTeam Analysis: School of Engineering PRJ 62404 Engineering Design and AnalysisCovyn YongNo ratings yet
- Team Analysis: School of Engineering PRJ 62404 Engineering Design and AnalysisDocument1 pageTeam Analysis: School of Engineering PRJ 62404 Engineering Design and AnalysisCovyn YongNo ratings yet
- Team Analysis: School of Engineering PRJ 62404 Engineering Design and AnalysisDocument1 pageTeam Analysis: School of Engineering PRJ 62404 Engineering Design and AnalysisCovyn YongNo ratings yet
- Numerical Pattern Recognition TestDocument7 pagesNumerical Pattern Recognition Testmik.trovaoNo ratings yet
- Fundamental Principles of AyurvedaDocument2 pagesFundamental Principles of Ayurvedaravisha7kNo ratings yet
- Case ReportDocument16 pagesCase ReportSabbir ThePsychoExpressNo ratings yet
- Deftones - Back To School (Pink Maggit Rap Version) : (Intro)Document2 pagesDeftones - Back To School (Pink Maggit Rap Version) : (Intro)zwartwerkerijNo ratings yet
- Ra 10868Document11 pagesRa 10868Edalyn Capili100% (1)
- Schon Product List PDF 1Document8 pagesSchon Product List PDF 1vishal vishalNo ratings yet
- Brandi PPT For BrandingDocument27 pagesBrandi PPT For BrandingShah ParinNo ratings yet
- Comparative and Superlative Adjectives PresentationDocument15 pagesComparative and Superlative Adjectives Presentationapi-248688582No ratings yet
- Maternal and Infant Care Beliefs Aeta Mothers in PhilippinesDocument8 pagesMaternal and Infant Care Beliefs Aeta Mothers in PhilippinesChristine Joy MolinaNo ratings yet
- Effect of Bolt Pretension in Single Lap Bolted Joint IJERTV4IS010269Document4 pagesEffect of Bolt Pretension in Single Lap Bolted Joint IJERTV4IS010269ayush100% (1)
- Brooklyn Mitsubishi Petition Notice To Respondents Schedules A-GDocument98 pagesBrooklyn Mitsubishi Petition Notice To Respondents Schedules A-GQueens PostNo ratings yet
- FisheriesDocument31 pagesFisheriesGarima LoonaNo ratings yet
- Me TurnoverDocument2 pagesMe TurnoverAparna ShajiNo ratings yet
- Language Learning TipDocument6 pagesLanguage Learning TipFrancis JessiusNo ratings yet
- HorrorDocument25 pagesHorrorYasser Nutalenko100% (2)
- Lecture 5 Theory of AccidentDocument14 pagesLecture 5 Theory of Accidenthayelom100% (1)
- History of The Negro Race in America From 1619 To 1880. Vol. 2 (Of 2) Negroes As Slaves, As Soldiers, and As Citizens by Williams, George WashingtonDocument476 pagesHistory of The Negro Race in America From 1619 To 1880. Vol. 2 (Of 2) Negroes As Slaves, As Soldiers, and As Citizens by Williams, George WashingtonGutenberg.org100% (2)
- Lion of The North - Rules & ScenariosDocument56 pagesLion of The North - Rules & ScenariosBrant McClureNo ratings yet
- What Do You Know About Jobs - 28056Document2 pagesWhat Do You Know About Jobs - 28056Kadek DharmawanNo ratings yet
- 1st Year Chemistry Pairing Scheme 2021 - 11th Class - Ratta - PKDocument2 pages1st Year Chemistry Pairing Scheme 2021 - 11th Class - Ratta - PKazeemNo ratings yet
- Arturo Pomar by Bill Wall: Maestros (Pomar, My 50 Games With Masters) - Pomar Was Only 14 at TheDocument3 pagesArturo Pomar by Bill Wall: Maestros (Pomar, My 50 Games With Masters) - Pomar Was Only 14 at TheKartik ShroffNo ratings yet
- Cemex Holdings Philippines Annual Report 2016 PDFDocument47 pagesCemex Holdings Philippines Annual Report 2016 PDFFritz NatividadNo ratings yet
- Identification and Certification of Labconco Class Ii Safety CabinetsDocument9 pagesIdentification and Certification of Labconco Class Ii Safety CabinetscobramcNo ratings yet
- Metallic BondingDocument2 pagesMetallic BondingJohanna LipioNo ratings yet
- EPM-1183 Ethics, Code of Conduct & Professional PracticeDocument41 pagesEPM-1183 Ethics, Code of Conduct & Professional PracticeDev ThackerNo ratings yet
- 1876.19 Strategic Plan FinalDocument7 pages1876.19 Strategic Plan FinalGaurav ManiyarNo ratings yet
- Barcode Scanner, Wireless Barcode Scanner, DC5112 Barcode ScannerDocument3 pagesBarcode Scanner, Wireless Barcode Scanner, DC5112 Barcode ScannerdcodeNo ratings yet
- By Laws Amended As at 1 July 2022 PDFDocument364 pagesBy Laws Amended As at 1 July 2022 PDFJING YI LIMNo ratings yet