
Class D Amplifier2
Class D Amplifier2
You might also like
- Class D Audio Amplifier With Ferroxcube Gapped Toroid Output FilterDocument0 pagesClass D Audio Amplifier With Ferroxcube Gapped Toroid Output Filterikaro181083100% (1)
- 5.2 PWM 7 Mac 2017Document34 pages5.2 PWM 7 Mac 2017Elawarasi Nadarajan100% (1)
- Get PC: Red Giant PluraleyesDocument6 pagesGet PC: Red Giant Pluraleyesheru wijayaNo ratings yet
- Class D AmplifierDocument15 pagesClass D AmplifierPramudya Ksatria BudimanNo ratings yet
- Class D Amplifiers: Fundamentals of Operation and Recent DevelopmentsDocument10 pagesClass D Amplifiers: Fundamentals of Operation and Recent DevelopmentsEssil ElfradiNo ratings yet
- Analog Isolation D AmpDocument7 pagesAnalog Isolation D AmpDirceu Rodrigues JrNo ratings yet
- Class D Audio Amplifier Basics PDFDocument14 pagesClass D Audio Amplifier Basics PDFJulian De MarcosNo ratings yet
- Amplifier Circuits Are Classified Under Different ClassesDocument31 pagesAmplifier Circuits Are Classified Under Different ClassesEul CortesNo ratings yet
- Class A Amplifiers: Overview of The DeviceDocument10 pagesClass A Amplifiers: Overview of The DeviceSRMEA SAN RAFAEL BULACANNo ratings yet
- Filter-Free Design Helps Class-D Audio Amplifier ImplementationsDocument6 pagesFilter-Free Design Helps Class-D Audio Amplifier ImplementationsDirson Volmir WilligNo ratings yet
- ELECTRONICA - Components - Projects - ApplicationsDocument12 pagesELECTRONICA - Components - Projects - ApplicationsRachel RowlandNo ratings yet
- Application Note AN-1071: Class D Audio Amplifier BasicsDocument14 pagesApplication Note AN-1071: Class D Audio Amplifier BasicsAndrea FasatoNo ratings yet
- Classd 3Document30 pagesClassd 3anisettimanikantaNo ratings yet
- Designing An Audio AmplifierDocument35 pagesDesigning An Audio AmplifierCh Cheah100% (2)
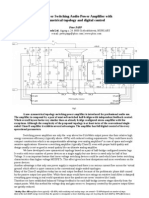
- High Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlDocument3 pagesHigh Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlPéter PAPPNo ratings yet
- Doherty Amplifier BasicsDocument16 pagesDoherty Amplifier Basicslakeman001No ratings yet
- Class D Amplifiers - Interactive SimulationsDocument5 pagesClass D Amplifiers - Interactive SimulationsCristi BondNo ratings yet
- Slyt155 - An Audio Circuit Collection 1Document6 pagesSlyt155 - An Audio Circuit Collection 1EduardoSánchezNo ratings yet
- Class D Vs Ab Efficiency ReportDocument2 pagesClass D Vs Ab Efficiency ReportAnurag SrivastavaNo ratings yet
- Amplificator Clasa DDocument4 pagesAmplificator Clasa DelmannNo ratings yet
- Class D AmplifierDocument5 pagesClass D AmplifierkothuraNo ratings yet
- Transformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryDocument4 pagesTransformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryAvinash SharmaNo ratings yet
- Audio MixerDocument28 pagesAudio MixerAyah PanduNo ratings yet
- Class D Audio AmplifiersDocument56 pagesClass D Audio AmplifiersreadthenewsNo ratings yet
- Learning Objectives:: Topic 1.4.1 - Op-Amp CharacteristicsDocument9 pagesLearning Objectives:: Topic 1.4.1 - Op-Amp CharacteristicsArnav KushwahaNo ratings yet
- Biasing Techniques: Home Semiconductors Bipolar Junction Transistors Index Practical Biasing TechniquesDocument6 pagesBiasing Techniques: Home Semiconductors Bipolar Junction Transistors Index Practical Biasing TechniquesSayed AzizNo ratings yet
- Class D Amplifier Fa QDocument12 pagesClass D Amplifier Fa Qychig1232669No ratings yet
- Class ADocument2 pagesClass AAi Emiko KeiNo ratings yet
- Power Amplifiers PartIIDocument15 pagesPower Amplifiers PartIIAya Osama ZakiNo ratings yet
- Design of Two Stage Op-AmpDocument4 pagesDesign of Two Stage Op-AmpWARSE JournalsNo ratings yet
- Opamp Desiging Project ReportDocument6 pagesOpamp Desiging Project ReportTarun PrakashNo ratings yet
- Power Amp ClassDocument33 pagesPower Amp Classtaiwo_oyeniyiNo ratings yet
- Class D Amplifier DesignDocument3 pagesClass D Amplifier DesignkovachjkNo ratings yet
- Efficient Audio Power AmplificationDocument10 pagesEfficient Audio Power AmplificationvmsaNo ratings yet
- Chapter 10Document51 pagesChapter 10Wendel SalemNo ratings yet
- Eet 223 (1) Analog Electronics JagjeetDocument79 pagesEet 223 (1) Analog Electronics JagjeetMahima ArrawatiaNo ratings yet
- Class-C Power Amplifier Design For GSM ApplicationDocument5 pagesClass-C Power Amplifier Design For GSM ApplicationJose David CastroNo ratings yet
- You Can DIY! A 25W OTL Tube Amplifier - AudioxpressDocument15 pagesYou Can DIY! A 25W OTL Tube Amplifier - AudioxpressLaskar on-LineNo ratings yet
- ClasssA AmpDocument7 pagesClasssA AmpRamNo ratings yet
- 40m AM TX ArticleDocument6 pages40m AM TX ArticleElectrónica HeizerNo ratings yet
- My Reference Project - Design CriteriaDocument7 pagesMy Reference Project - Design CriterialuizcpimentaNo ratings yet
- Class-D Power AmplifierDocument30 pagesClass-D Power AmplifierSidney O. EbotNo ratings yet
- Types of Amplifier: Power Signal Power SupplyDocument12 pagesTypes of Amplifier: Power Signal Power SupplyDora BabuNo ratings yet
- JLH 1985 HeadphoneDocument5 pagesJLH 1985 HeadphoneDave LeeNo ratings yet
- Audio Power Amplifier ProjectDocument49 pagesAudio Power Amplifier ProjectMohd Razali BaharonNo ratings yet
- Direct Coupled AmpsDocument8 pagesDirect Coupled Ampsronga38No ratings yet
- Design and Analysis of A Basic Class D AmplifierDocument22 pagesDesign and Analysis of A Basic Class D AmplifieranisettimanikantaNo ratings yet
- Totem-Pole Output StageDocument18 pagesTotem-Pole Output StageSlanky BirOe PulauNo ratings yet
- Fully Differential Amplifier ThesisDocument5 pagesFully Differential Amplifier ThesisWhereToBuyCollegePapersSingapore100% (2)
- Class-AB Current Booster Provides High Output Voltage SwingDocument4 pagesClass-AB Current Booster Provides High Output Voltage SwingciccioNo ratings yet
- An Approach To Audio Frequency Amplifier DesignDocument136 pagesAn Approach To Audio Frequency Amplifier DesignKevin HaworthNo ratings yet
- Class D Tutorial 2Document17 pagesClass D Tutorial 2អំភ្លី សំលេង100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- A Guide to Vintage Audio Equipment for the Hobbyist and AudiophileFrom EverandA Guide to Vintage Audio Equipment for the Hobbyist and AudiophileNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Components/Parts of A System Unit: Shiela Jean Alumbro Bpa 1-CDocument2 pagesComponents/Parts of A System Unit: Shiela Jean Alumbro Bpa 1-CSHIELANo ratings yet
- SAP Basis Basics PDFDocument25 pagesSAP Basis Basics PDFMukesh DS100% (1)
- Data Protection For SAP HANA Installation and User's Guide: IBM Tivoli Storage Manager For Enterprise Resource PlanningDocument108 pagesData Protection For SAP HANA Installation and User's Guide: IBM Tivoli Storage Manager For Enterprise Resource PlanningJavier GonzalezNo ratings yet
- ZE620KL L3-L4 Board Level TroubleShooting Guide - 20180102Document24 pagesZE620KL L3-L4 Board Level TroubleShooting Guide - 20180102Leo MendesNo ratings yet
- U.S. Semiconductor Exports To China Current Policies and TrendsDocument36 pagesU.S. Semiconductor Exports To China Current Policies and TrendsQuang Huy PhamNo ratings yet
- MAQ Tech Manual Jul 28 2005Document47 pagesMAQ Tech Manual Jul 28 2005Zied NasriNo ratings yet
- s7-200 SMART System Manual en-US PDFDocument895 pagess7-200 SMART System Manual en-US PDFSyfNo ratings yet
- Philips FWM397 55 PDFDocument33 pagesPhilips FWM397 55 PDFElmer Leodan Rojas CachayNo ratings yet
- DVLSI Lab EXPT1 ManualDocument8 pagesDVLSI Lab EXPT1 ManualApoorvaNo ratings yet
- iMX RT1010 EVK QSGDocument4 pagesiMX RT1010 EVK QSGCatalin NeacsuNo ratings yet
- Operation Manual: © Zoom CorporationDocument65 pagesOperation Manual: © Zoom CorporationPius SchumNo ratings yet
- 8n60p 8n60fDocument8 pages8n60p 8n60fBylliedekidNo ratings yet
- Atomcell: ChallengesDocument2 pagesAtomcell: ChallengesMohammed ShakilNo ratings yet
- Computer (BCS Confidence)Document31 pagesComputer (BCS Confidence)Towfiq Ahmed100% (1)
- Calibration Report - VW Rod ExtensometerDocument12 pagesCalibration Report - VW Rod ExtensometerdavzuluetaNo ratings yet
- LICA 2021 Unit 1Document107 pagesLICA 2021 Unit 1DossDossNo ratings yet
- Homework 1 PDFDocument2 pagesHomework 1 PDFRao Arslan RajputNo ratings yet
- ThinkPad T490s Single Model 202004200434Document3 pagesThinkPad T490s Single Model 202004200434Yudi DjohanNo ratings yet
- Weller IntroductionDocument1 pageWeller IntroductionPrathap TNo ratings yet
- Plot The DC Characteristics / 5 Regions of A CMOS InverterDocument7 pagesPlot The DC Characteristics / 5 Regions of A CMOS InverterSaurabh PriyadarshiNo ratings yet
- Basic Principles of Electronic ExchangesDocument12 pagesBasic Principles of Electronic ExchangesAryamn ProstNo ratings yet
- Acer Aspire 5541G (Compal LA-5992P) PDFDocument55 pagesAcer Aspire 5541G (Compal LA-5992P) PDFMustafa AkanNo ratings yet
- Miracall PABX Telephone System PDFDocument1 pageMiracall PABX Telephone System PDFsundar chapagainNo ratings yet
- UntitledDocument11 pagesUntitledKavitha RanjithNo ratings yet
- 2022 TimeDocument12 pages2022 TimeManish KumarNo ratings yet
- CH340G USB TTL Converter PDFDocument9 pagesCH340G USB TTL Converter PDFJuan CastrillónNo ratings yet
- Efficient Design of 1Document7 pagesEfficient Design of 1sumathiNo ratings yet
- Cabling Presentation: by Caleb KandoroDocument18 pagesCabling Presentation: by Caleb KandoroShione T MundawararaNo ratings yet























































































Download as docx, pdf, or txt
You might also like
- Class D Audio Amplifier With Ferroxcube Gapped Toroid Output FilterDocument0 pagesClass D Audio Amplifier With Ferroxcube Gapped Toroid Output Filterikaro181083100% (1)
- 5.2 PWM 7 Mac 2017Document34 pages5.2 PWM 7 Mac 2017Elawarasi Nadarajan100% (1)
- Get PC: Red Giant PluraleyesDocument6 pagesGet PC: Red Giant Pluraleyesheru wijayaNo ratings yet
- Class D AmplifierDocument15 pagesClass D AmplifierPramudya Ksatria BudimanNo ratings yet
- Class D Amplifiers: Fundamentals of Operation and Recent DevelopmentsDocument10 pagesClass D Amplifiers: Fundamentals of Operation and Recent DevelopmentsEssil ElfradiNo ratings yet
- Analog Isolation D AmpDocument7 pagesAnalog Isolation D AmpDirceu Rodrigues JrNo ratings yet
- Class D Audio Amplifier Basics PDFDocument14 pagesClass D Audio Amplifier Basics PDFJulian De MarcosNo ratings yet
- Amplifier Circuits Are Classified Under Different ClassesDocument31 pagesAmplifier Circuits Are Classified Under Different ClassesEul CortesNo ratings yet
- Class A Amplifiers: Overview of The DeviceDocument10 pagesClass A Amplifiers: Overview of The DeviceSRMEA SAN RAFAEL BULACANNo ratings yet
- Filter-Free Design Helps Class-D Audio Amplifier ImplementationsDocument6 pagesFilter-Free Design Helps Class-D Audio Amplifier ImplementationsDirson Volmir WilligNo ratings yet
- ELECTRONICA - Components - Projects - ApplicationsDocument12 pagesELECTRONICA - Components - Projects - ApplicationsRachel RowlandNo ratings yet
- Application Note AN-1071: Class D Audio Amplifier BasicsDocument14 pagesApplication Note AN-1071: Class D Audio Amplifier BasicsAndrea FasatoNo ratings yet
- Classd 3Document30 pagesClassd 3anisettimanikantaNo ratings yet
- Designing An Audio AmplifierDocument35 pagesDesigning An Audio AmplifierCh Cheah100% (2)
- High Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlDocument3 pagesHigh Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlPéter PAPPNo ratings yet
- Doherty Amplifier BasicsDocument16 pagesDoherty Amplifier Basicslakeman001No ratings yet
- Class D Amplifiers - Interactive SimulationsDocument5 pagesClass D Amplifiers - Interactive SimulationsCristi BondNo ratings yet
- Slyt155 - An Audio Circuit Collection 1Document6 pagesSlyt155 - An Audio Circuit Collection 1EduardoSánchezNo ratings yet
- Class D Vs Ab Efficiency ReportDocument2 pagesClass D Vs Ab Efficiency ReportAnurag SrivastavaNo ratings yet
- Amplificator Clasa DDocument4 pagesAmplificator Clasa DelmannNo ratings yet
- Class D AmplifierDocument5 pagesClass D AmplifierkothuraNo ratings yet
- Transformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryDocument4 pagesTransformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryAvinash SharmaNo ratings yet
- Audio MixerDocument28 pagesAudio MixerAyah PanduNo ratings yet
- Class D Audio AmplifiersDocument56 pagesClass D Audio AmplifiersreadthenewsNo ratings yet
- Learning Objectives:: Topic 1.4.1 - Op-Amp CharacteristicsDocument9 pagesLearning Objectives:: Topic 1.4.1 - Op-Amp CharacteristicsArnav KushwahaNo ratings yet
- Biasing Techniques: Home Semiconductors Bipolar Junction Transistors Index Practical Biasing TechniquesDocument6 pagesBiasing Techniques: Home Semiconductors Bipolar Junction Transistors Index Practical Biasing TechniquesSayed AzizNo ratings yet
- Class D Amplifier Fa QDocument12 pagesClass D Amplifier Fa Qychig1232669No ratings yet
- Class ADocument2 pagesClass AAi Emiko KeiNo ratings yet
- Power Amplifiers PartIIDocument15 pagesPower Amplifiers PartIIAya Osama ZakiNo ratings yet
- Design of Two Stage Op-AmpDocument4 pagesDesign of Two Stage Op-AmpWARSE JournalsNo ratings yet
- Opamp Desiging Project ReportDocument6 pagesOpamp Desiging Project ReportTarun PrakashNo ratings yet
- Power Amp ClassDocument33 pagesPower Amp Classtaiwo_oyeniyiNo ratings yet
- Class D Amplifier DesignDocument3 pagesClass D Amplifier DesignkovachjkNo ratings yet
- Efficient Audio Power AmplificationDocument10 pagesEfficient Audio Power AmplificationvmsaNo ratings yet
- Chapter 10Document51 pagesChapter 10Wendel SalemNo ratings yet
- Eet 223 (1) Analog Electronics JagjeetDocument79 pagesEet 223 (1) Analog Electronics JagjeetMahima ArrawatiaNo ratings yet
- Class-C Power Amplifier Design For GSM ApplicationDocument5 pagesClass-C Power Amplifier Design For GSM ApplicationJose David CastroNo ratings yet
- You Can DIY! A 25W OTL Tube Amplifier - AudioxpressDocument15 pagesYou Can DIY! A 25W OTL Tube Amplifier - AudioxpressLaskar on-LineNo ratings yet
- ClasssA AmpDocument7 pagesClasssA AmpRamNo ratings yet
- 40m AM TX ArticleDocument6 pages40m AM TX ArticleElectrónica HeizerNo ratings yet
- My Reference Project - Design CriteriaDocument7 pagesMy Reference Project - Design CriterialuizcpimentaNo ratings yet
- Class-D Power AmplifierDocument30 pagesClass-D Power AmplifierSidney O. EbotNo ratings yet
- Types of Amplifier: Power Signal Power SupplyDocument12 pagesTypes of Amplifier: Power Signal Power SupplyDora BabuNo ratings yet
- JLH 1985 HeadphoneDocument5 pagesJLH 1985 HeadphoneDave LeeNo ratings yet
- Audio Power Amplifier ProjectDocument49 pagesAudio Power Amplifier ProjectMohd Razali BaharonNo ratings yet
- Direct Coupled AmpsDocument8 pagesDirect Coupled Ampsronga38No ratings yet
- Design and Analysis of A Basic Class D AmplifierDocument22 pagesDesign and Analysis of A Basic Class D AmplifieranisettimanikantaNo ratings yet
- Totem-Pole Output StageDocument18 pagesTotem-Pole Output StageSlanky BirOe PulauNo ratings yet
- Fully Differential Amplifier ThesisDocument5 pagesFully Differential Amplifier ThesisWhereToBuyCollegePapersSingapore100% (2)
- Class-AB Current Booster Provides High Output Voltage SwingDocument4 pagesClass-AB Current Booster Provides High Output Voltage SwingciccioNo ratings yet
- An Approach To Audio Frequency Amplifier DesignDocument136 pagesAn Approach To Audio Frequency Amplifier DesignKevin HaworthNo ratings yet
- Class D Tutorial 2Document17 pagesClass D Tutorial 2អំភ្លី សំលេង100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- A Guide to Vintage Audio Equipment for the Hobbyist and AudiophileFrom EverandA Guide to Vintage Audio Equipment for the Hobbyist and AudiophileNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Components/Parts of A System Unit: Shiela Jean Alumbro Bpa 1-CDocument2 pagesComponents/Parts of A System Unit: Shiela Jean Alumbro Bpa 1-CSHIELANo ratings yet
- SAP Basis Basics PDFDocument25 pagesSAP Basis Basics PDFMukesh DS100% (1)
- Data Protection For SAP HANA Installation and User's Guide: IBM Tivoli Storage Manager For Enterprise Resource PlanningDocument108 pagesData Protection For SAP HANA Installation and User's Guide: IBM Tivoli Storage Manager For Enterprise Resource PlanningJavier GonzalezNo ratings yet
- ZE620KL L3-L4 Board Level TroubleShooting Guide - 20180102Document24 pagesZE620KL L3-L4 Board Level TroubleShooting Guide - 20180102Leo MendesNo ratings yet
- U.S. Semiconductor Exports To China Current Policies and TrendsDocument36 pagesU.S. Semiconductor Exports To China Current Policies and TrendsQuang Huy PhamNo ratings yet
- MAQ Tech Manual Jul 28 2005Document47 pagesMAQ Tech Manual Jul 28 2005Zied NasriNo ratings yet
- s7-200 SMART System Manual en-US PDFDocument895 pagess7-200 SMART System Manual en-US PDFSyfNo ratings yet
- Philips FWM397 55 PDFDocument33 pagesPhilips FWM397 55 PDFElmer Leodan Rojas CachayNo ratings yet
- DVLSI Lab EXPT1 ManualDocument8 pagesDVLSI Lab EXPT1 ManualApoorvaNo ratings yet
- iMX RT1010 EVK QSGDocument4 pagesiMX RT1010 EVK QSGCatalin NeacsuNo ratings yet
- Operation Manual: © Zoom CorporationDocument65 pagesOperation Manual: © Zoom CorporationPius SchumNo ratings yet
- 8n60p 8n60fDocument8 pages8n60p 8n60fBylliedekidNo ratings yet
- Atomcell: ChallengesDocument2 pagesAtomcell: ChallengesMohammed ShakilNo ratings yet
- Computer (BCS Confidence)Document31 pagesComputer (BCS Confidence)Towfiq Ahmed100% (1)
- Calibration Report - VW Rod ExtensometerDocument12 pagesCalibration Report - VW Rod ExtensometerdavzuluetaNo ratings yet
- LICA 2021 Unit 1Document107 pagesLICA 2021 Unit 1DossDossNo ratings yet
- Homework 1 PDFDocument2 pagesHomework 1 PDFRao Arslan RajputNo ratings yet
- ThinkPad T490s Single Model 202004200434Document3 pagesThinkPad T490s Single Model 202004200434Yudi DjohanNo ratings yet
- Weller IntroductionDocument1 pageWeller IntroductionPrathap TNo ratings yet
- Plot The DC Characteristics / 5 Regions of A CMOS InverterDocument7 pagesPlot The DC Characteristics / 5 Regions of A CMOS InverterSaurabh PriyadarshiNo ratings yet
- Basic Principles of Electronic ExchangesDocument12 pagesBasic Principles of Electronic ExchangesAryamn ProstNo ratings yet
- Acer Aspire 5541G (Compal LA-5992P) PDFDocument55 pagesAcer Aspire 5541G (Compal LA-5992P) PDFMustafa AkanNo ratings yet
- Miracall PABX Telephone System PDFDocument1 pageMiracall PABX Telephone System PDFsundar chapagainNo ratings yet
- UntitledDocument11 pagesUntitledKavitha RanjithNo ratings yet
- 2022 TimeDocument12 pages2022 TimeManish KumarNo ratings yet
- CH340G USB TTL Converter PDFDocument9 pagesCH340G USB TTL Converter PDFJuan CastrillónNo ratings yet
- Efficient Design of 1Document7 pagesEfficient Design of 1sumathiNo ratings yet
- Cabling Presentation: by Caleb KandoroDocument18 pagesCabling Presentation: by Caleb KandoroShione T MundawararaNo ratings yet