Download as pdf or txt
You might also like
- EV6000 Series Inverter Controller Inside User ManualDocument96 pagesEV6000 Series Inverter Controller Inside User ManualCarlito MoralesNo ratings yet
- Microprocessors: Programming With Time Delay Using LedsDocument20 pagesMicroprocessors: Programming With Time Delay Using LedsDioselle CastilloNo ratings yet
- Field Terminations Manual, Tricon v9.0JLDocument268 pagesField Terminations Manual, Tricon v9.0JLjesus lopezNo ratings yet
- Abc of Power Modules: Functionality, Structure and Handling of a Power ModuleFrom EverandAbc of Power Modules: Functionality, Structure and Handling of a Power ModuleNo ratings yet
- GQ EMF 360V2 380V2 390 - UserGuideDocument34 pagesGQ EMF 360V2 380V2 390 - UserGuidesurfsandNo ratings yet
- 37 Computer Science Unit-02Document50 pages37 Computer Science Unit-02lathaNo ratings yet
- Jumo IMAGO500 ManualDocument90 pagesJumo IMAGO500 ManualcarokotrihatmojoNo ratings yet
- Aparat US Petrea SCOUT 55Document64 pagesAparat US Petrea SCOUT 55Valentina BrumaNo ratings yet
- FP0R USERS MANUAL fp0r Hard F475e-2 PDFDocument348 pagesFP0R USERS MANUAL fp0r Hard F475e-2 PDFPetio MineffNo ratings yet
- 7UM61x Manual PDFDocument424 pages7UM61x Manual PDFJavier Valencia MurilloNo ratings yet
- Guided Wave Radar Level Transmitter: Profibus Pa Operating ManualDocument52 pagesGuided Wave Radar Level Transmitter: Profibus Pa Operating ManualBenNo ratings yet
- Flowmeter D184b059u02-04-05 - 2006Document52 pagesFlowmeter D184b059u02-04-05 - 2006jebisiNo ratings yet
- E3 and E3 Plus Solid-State Overload RelayDocument230 pagesE3 and E3 Plus Solid-State Overload Relaychaupha1No ratings yet
- IbaLink SM 128V I 2o v2.5 en A4Document42 pagesIbaLink SM 128V I 2o v2.5 en A4ahmed.farrag.hassan92No ratings yet
- Sinumerik 810 820 GA3 Interface - Part - 2 - Connection - ConditionsDocument128 pagesSinumerik 810 820 GA3 Interface - Part - 2 - Connection - ConditionsSam eagle goodNo ratings yet
- System 295 Powermeter & Harmonic Analyzer: Installation and Operation ManualDocument172 pagesSystem 295 Powermeter & Harmonic Analyzer: Installation and Operation ManualVilma ZambranoNo ratings yet
- b70 2040Document41 pagesb70 2040haddanNo ratings yet
- E3 and E3 Plus Solid-State Overload RelayDocument230 pagesE3 and E3 Plus Solid-State Overload RelayfabianNo ratings yet
- ABB Protronic 500 enDocument30 pagesABB Protronic 500 enspokkie_spokNo ratings yet
- Manual Fp0rDocument336 pagesManual Fp0rEmanuel CarlinhoNo ratings yet
- Transformer Protection and Control RET615: Application ManualDocument108 pagesTransformer Protection and Control RET615: Application Manualtirthankar devNo ratings yet
- NumericPlasmaTorchHeightControllerManual (F1650Ver1 mp7fDocument48 pagesNumericPlasmaTorchHeightControllerManual (F1650Ver1 mp7fmarcoNo ratings yet
- C6-C64 PLC Interface ManualDocument342 pagesC6-C64 PLC Interface Manualsunhuynh100% (1)
- Generator Protection and Control REG630: Application ManualDocument64 pagesGenerator Protection and Control REG630: Application ManualMagendran SurulivelNo ratings yet
- Dynacord CMS3 enDocument51 pagesDynacord CMS3 enCsaba LangerNo ratings yet
- Installation and Operation Manual: Ac Smartstart® Ac Power Distribution Units (Pdu)Document50 pagesInstallation and Operation Manual: Ac Smartstart® Ac Power Distribution Units (Pdu)Techno TechNo ratings yet
- Montageanleitung Notice de Montage: Mounting InstructionsDocument72 pagesMontageanleitung Notice de Montage: Mounting Instructionsjasonrla233No ratings yet
- FM-60 Flexible Multiplexer User's Manual: Version A2.0, February-12-2004Document257 pagesFM-60 Flexible Multiplexer User's Manual: Version A2.0, February-12-2004Saptarshi ChatterjeeNo ratings yet
- Sirius enDocument532 pagesSirius enJim_____No ratings yet
- ABB System 800xa 6.1 AC 800M - Controller HardwareDocument442 pagesABB System 800xa 6.1 AC 800M - Controller HardwareRoger GimenesNo ratings yet
- 3HAC028509-001 Rev - enDocument34 pages3HAC028509-001 Rev - enRoberto VillegasNo ratings yet
- Manual MitsubishiDocument53 pagesManual MitsubishiIustin AlexandruNo ratings yet
- ASD-G9ETH Ethernet Interface User'sDocument123 pagesASD-G9ETH Ethernet Interface User'sjoseodelgado17No ratings yet
- TIM 40 Instruction BookDocument44 pagesTIM 40 Instruction BookMarkus SenojNo ratings yet
- 3hac070208 Am Scalable Io Rw 7-En (1)Document104 pages3hac070208 Am Scalable Io Rw 7-En (1)anuargNo ratings yet
- Electronic Counter Zx020Document11 pagesElectronic Counter Zx020IGHORODJENo ratings yet
- Advant Controller 160Document84 pagesAdvant Controller 160Lazurca MariusNo ratings yet
- RET630 Appl 756786 ENfDocument88 pagesRET630 Appl 756786 ENfVandersonNo ratings yet
- Sirius enDocument425 pagesSirius enabouali najafNo ratings yet
- 1MRK505264-UUS - en Commissioning Manual Busbar Protection REB650 ANSIDocument88 pages1MRK505264-UUS - en Commissioning Manual Busbar Protection REB650 ANSINiranjanNo ratings yet
- PMAC735 User Manual V8.2Document98 pagesPMAC735 User Manual V8.2jesankingNo ratings yet
- ADI4Document79 pagesADI4Rudi CasmitaNo ratings yet
- KNX Shutter ActuatorDocument145 pagesKNX Shutter ActuatorChristopher OaresNo ratings yet
- Line Differential Protection and Control RED615: Application ManualDocument92 pagesLine Differential Protection and Control RED615: Application Manualbakien-canNo ratings yet
- 574-771 4020 TSGDocument38 pages574-771 4020 TSGvayubitNo ratings yet
- SZGH - Servo Drive ManualDocument54 pagesSZGH - Servo Drive Manualrichsalgado90% (10)
- 7SA522x Manual A3 v043003 UsDocument592 pages7SA522x Manual A3 v043003 UsDrastaru ValentinNo ratings yet
- Self Contained Wireless Alarm System: ModelsDocument88 pagesSelf Contained Wireless Alarm System: ModelsShashi Kiran GNo ratings yet
- Me1da6hai-Q - User's Manual 236882-A (08.10)Document116 pagesMe1da6hai-Q - User's Manual 236882-A (08.10)Natella ShirinzadeNo ratings yet
- SDS1000X-E Service ManualDocument84 pagesSDS1000X-E Service ManualMikelVivanco100% (1)
- Mitsubishi Alpha Beginners Manual PDFDocument53 pagesMitsubishi Alpha Beginners Manual PDFGuillermo Osvaldo Rivera MelladoNo ratings yet
- ABB VFD EN - ACS320 - SFUM - A - A4 User ManualDocument44 pagesABB VFD EN - ACS320 - SFUM - A - A4 User ManualRahul GuptaNo ratings yet
- Product Manual: Valve ControllerDocument18 pagesProduct Manual: Valve ControllerMohamedNo ratings yet
- Low Cost Synchronous-Controller Operating Instructions For Operator Software OS3.xDocument52 pagesLow Cost Synchronous-Controller Operating Instructions For Operator Software OS3.xSher BahadarNo ratings yet
- ACS310Users ManualDocument42 pagesACS310Users ManualTrịnh Văn PhậnNo ratings yet
- Cpu RtaDocument212 pagesCpu RtaRamesh GrandheNo ratings yet
- Digital Voltage Regulator: Installation and MaintenanceDocument20 pagesDigital Voltage Regulator: Installation and MaintenanceAteeqNo ratings yet
- REF542plus Om 755869 ENdDocument130 pagesREF542plus Om 755869 ENdgoomiNo ratings yet
- Commissioning ManualDocument56 pagesCommissioning ManualJohan Laureano ApolinarioNo ratings yet
- 6MD663 64 ManualDocument224 pages6MD663 64 Manualdilipeline100% (1)
- Manual Rf-Id Tdoct1709e - EngDocument82 pagesManual Rf-Id Tdoct1709e - EngfernacvrdNo ratings yet
- Safe Use of Smart Devices in Systems Important to Safety in Nuclear Power PlantsFrom EverandSafe Use of Smart Devices in Systems Important to Safety in Nuclear Power PlantsNo ratings yet
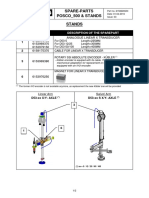
- Posco 500 and Stands - List of Spares - 6159920630-03-Series - ENDocument2 pagesPosco 500 and Stands - List of Spares - 6159920630-03-Series - ENDiana MIND AmayaNo ratings yet
- TE200/TE210/TE300/TE310 Series: Thermal Transfer/Direct Thermal Bar Code PrinterDocument55 pagesTE200/TE210/TE300/TE310 Series: Thermal Transfer/Direct Thermal Bar Code PrinterDiana MIND AmayaNo ratings yet
- AS 84720 CV-X Control UM 658GB GB WW 1106-1Document184 pagesAS 84720 CV-X Control UM 658GB GB WW 1106-1Diana MIND AmayaNo ratings yet
- Quick Start Guide For EX260-SENDocument9 pagesQuick Start Guide For EX260-SENDiana MIND AmayaNo ratings yet
- Allen BradleyDocument207 pagesAllen BradleyDiana MIND AmayaNo ratings yet
- The SISTEMA Cookbook 2: Use of Network LibrariesDocument14 pagesThe SISTEMA Cookbook 2: Use of Network LibrariesDiana MIND AmayaNo ratings yet
- Transformador Allen BradleyDocument3 pagesTransformador Allen BradleyDiana MIND AmayaNo ratings yet
- Operating Instructions Specification Hiperface Motor Feedback Protocol Neutral IM0064865Document79 pagesOperating Instructions Specification Hiperface Motor Feedback Protocol Neutral IM0064865Mohammad MorassaeiNo ratings yet
- Specifications For LCD Module: Customer Customer Part No. Ampire Part No. AM-800480R2TMQW-TU0H Approved by DateDocument59 pagesSpecifications For LCD Module: Customer Customer Part No. Ampire Part No. AM-800480R2TMQW-TU0H Approved by DateRathod GunvantrayNo ratings yet
- 17.6 COM5: MODBUS RTU On Serial Port RS485: Function DescriptionDocument4 pages17.6 COM5: MODBUS RTU On Serial Port RS485: Function DescriptionAndrea RossettoNo ratings yet
- s800 Modbus PDFDocument11 pagess800 Modbus PDFMuhammad NourNo ratings yet
- SunSpec Modbus TI en 15Document52 pagesSunSpec Modbus TI en 15atari7001No ratings yet
- 6.1 Physical Non-Synchronized Random Access ProcedureDocument161 pages6.1 Physical Non-Synchronized Random Access ProcedureLAVANYA MURALINo ratings yet
- Product Information: SIMATIC S7-200 EM231, EM232, EM235 Analog Input and Output Modules ReleaseDocument13 pagesProduct Information: SIMATIC S7-200 EM231, EM232, EM235 Analog Input and Output Modules ReleaseLuisNo ratings yet
- CY8CMBR3xxx Register TRM 001-91082 0BDocument165 pagesCY8CMBR3xxx Register TRM 001-91082 0Bรัศมีเจริญชัย ธีรเมธNo ratings yet
- ES9016S Datasheet v1.91Document33 pagesES9016S Datasheet v1.91Nursapta nugrohoNo ratings yet
- Digital Electronics Textbook For XII Standard Bifocal Vocational ElectronicsDocument27 pagesDigital Electronics Textbook For XII Standard Bifocal Vocational ElectronicsGuruprasad NayakNo ratings yet
- Lecture 1 (NumberBaseConversion)Document43 pagesLecture 1 (NumberBaseConversion)sdNo ratings yet
- Pymodbustcp Documentation: Release 0.1.10Document34 pagesPymodbustcp Documentation: Release 0.1.10ilarroceascribdNo ratings yet
- FDC PDFDocument212 pagesFDC PDFpawanNo ratings yet
- Conitel Slave InterfaceDocument38 pagesConitel Slave InterfaceJorge GranadosNo ratings yet
- Xi - Computer Science Reduced Syllabus Study Materials 2021-2021Document70 pagesXi - Computer Science Reduced Syllabus Study Materials 2021-2021Bella CakieNo ratings yet
- IT1005 Reference SheetDocument51 pagesIT1005 Reference SheetEdmund SiauNo ratings yet
- Wired M-Bus Water Meters Flowiq® 2101/3100: Technical DescriptionDocument30 pagesWired M-Bus Water Meters Flowiq® 2101/3100: Technical DescriptionmitkoNo ratings yet
- Advance PLC Programming Course V2019 Chapter 02 PDFDocument38 pagesAdvance PLC Programming Course V2019 Chapter 02 PDFRomel AganNo ratings yet
- ABB SACE Division: PR122/VF Modbus System InterfaceDocument40 pagesABB SACE Division: PR122/VF Modbus System InterfacePedro RogerNo ratings yet
- Tda 7315Document12 pagesTda 7315Pardeep ManhasNo ratings yet
- Data Representation: Computer Organization & Assembly Language Programming DR Adnan Gutub Aagutub At' Uqu - Edu.saDocument33 pagesData Representation: Computer Organization & Assembly Language Programming DR Adnan Gutub Aagutub At' Uqu - Edu.sasharikNo ratings yet
- Unit 3Document17 pagesUnit 3Ishani RoyNo ratings yet
- Panasonic Tc-14a04p Tc-20a04p Tc-20b04 Chassis Gp3 SMDocument36 pagesPanasonic Tc-14a04p Tc-20a04p Tc-20b04 Chassis Gp3 SMugano529510No ratings yet
- Non-Positional Number SystemDocument6 pagesNon-Positional Number SystemhellorosyNo ratings yet
- Pro Camware 12 2004Document81 pagesPro Camware 12 2004VivekNo ratings yet
- Microcontroller Lab ManualDocument38 pagesMicrocontroller Lab Manualharshitha100% (1)