
Basic Statistics and Probability For Econometrics Econ 270a
Basic Statistics and Probability For Econometrics Econ 270a
You might also like
- Pilgrim Bank - Case StudyDocument14 pagesPilgrim Bank - Case StudyRachit Kulshrestha97% (39)
- Customer Churn Data - A Project Based On Logistic RegressionDocument31 pagesCustomer Churn Data - A Project Based On Logistic RegressionShyam Kishore Tripathi100% (12)
- Microemulsions Theory and PracticeFrom EverandMicroemulsions Theory and PracticeLeon PrinceRating: 5 out of 5 stars5/5 (1)
- Unit 31 Statistics For ManagementAssignment 1 (LO1 - LOs) 1Document3 pagesUnit 31 Statistics For ManagementAssignment 1 (LO1 - LOs) 1H A0% (1)
- Macroeconomic Theory, Thomas SargentDocument544 pagesMacroeconomic Theory, Thomas SargentEzequiel Lopez Mondo50% (2)
- Customer Insights Analyst TaskDocument3 pagesCustomer Insights Analyst TaskPulkit PrajapatiNo ratings yet
- Mth302 Quiz 4 SOlvedDocument17 pagesMth302 Quiz 4 SOlvedHafeez SaleemiNo ratings yet
- Statistical Analysis PlanDocument92 pagesStatistical Analysis PlanhimeshagrawalNo ratings yet
- Summary of Game Play 2 I. Scenario Selection 2 II. Airborne Drops 3Document11 pagesSummary of Game Play 2 I. Scenario Selection 2 II. Airborne Drops 3Mark BallingerNo ratings yet
- The High-Precision Tulip - Development and Combat Employment of The Soviet Laser-Guided Mortar RoundDocument5 pagesThe High-Precision Tulip - Development and Combat Employment of The Soviet Laser-Guided Mortar Roundscorpion_l_81No ratings yet
- 1997integrated Battlefield Management Begins in SpaceADA442715Document12 pages1997integrated Battlefield Management Begins in SpaceADA442715Huanghe XiaoNo ratings yet
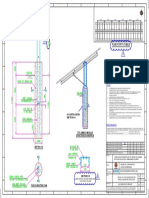
- DETAIL OF PILE FOUNDATION FOR MMS-Foundation Drawing 450dia Pile - TalcherDocument1 pageDETAIL OF PILE FOUNDATION FOR MMS-Foundation Drawing 450dia Pile - Talcherranvijaysingh2002100% (2)
- In Search of Identity: An Autobiography: Anwar El-Sadat (Rev. Ed. 1992)Document11 pagesIn Search of Identity: An Autobiography: Anwar El-Sadat (Rev. Ed. 1992)Andrian NasirNo ratings yet
- Fifty Questions For Doctrine Writers: Means Are As Important As EndsDocument6 pagesFifty Questions For Doctrine Writers: Means Are As Important As EndszeinnourNo ratings yet
- Essays On Flexible Exchange Rates - Paul R. KrugmanDocument116 pagesEssays On Flexible Exchange Rates - Paul R. KrugmanEdwin JudeNo ratings yet
- Seminar ContentsDocument1 pageSeminar ContentsAbhinandan SridharNo ratings yet
- ContentsDocument1 pageContentsAbhinandan SridharNo ratings yet
- Bases de Kalman Con RiccatiDocument48 pagesBases de Kalman Con RiccatiGustavo Omar Mesones MálagaNo ratings yet
- Center of GravityDocument9 pagesCenter of GravityAtaur RahmanNo ratings yet
- Ayman Al-Zawahiri: The Ideologue of Modern Islamic MilitancyDocument32 pagesAyman Al-Zawahiri: The Ideologue of Modern Islamic MilitancymeltNo ratings yet
- RDTSMS0017 A-1 Carbon Steel and High-Strength Low-Alloy For Shock Absorber Components - 27 - 11 - 20Document11 pagesRDTSMS0017 A-1 Carbon Steel and High-Strength Low-Alloy For Shock Absorber Components - 27 - 11 - 20Tayná RibeiroNo ratings yet
- Ada 637751Document50 pagesAda 637751OdicoNo ratings yet
- Deception OperationsDocument41 pagesDeception OperationsRocketoRussiaNo ratings yet
- PEACEKEEPING A Selected Bibliography 2009Document36 pagesPEACEKEEPING A Selected Bibliography 2009HipHop LabaratorijaNo ratings yet
- Introduction To Differantiable Manifolds-Notes-2012 PDFDocument132 pagesIntroduction To Differantiable Manifolds-Notes-2012 PDFHigher Education Complex of Bam ResearchNo ratings yet
- Chapter 1: Introduction 1: Department of EconomicsDocument2 pagesChapter 1: Introduction 1: Department of EconomicsHira DollNo ratings yet
- TTO-4 IMP Pipe Wrinkle Integrity DeterminationDocument91 pagesTTO-4 IMP Pipe Wrinkle Integrity Determinationthienle0228No ratings yet
- Mechanics of Structure IIDocument3 pagesMechanics of Structure IIMijanur RahamanNo ratings yet
- Mechanics of Structure II PDFDocument3 pagesMechanics of Structure II PDFMijanur RahamanNo ratings yet
- Tampoane Elastice PaulstraDocument150 pagesTampoane Elastice PaulstraStoianovici CristianNo ratings yet
- BstractDocument40 pagesBstractFRANK BULA MARTINEZNo ratings yet
- Combined ReportDocument118 pagesCombined ReportArijit SahaNo ratings yet
- Principlesofscie 02 JevouoftDocument496 pagesPrinciplesofscie 02 JevouoftBranko NikolicNo ratings yet
- VALUATION REPORT #00071921: Various Properties Together Known As "Mirland Development Corporation Assets"Document79 pagesVALUATION REPORT #00071921: Various Properties Together Known As "Mirland Development Corporation Assets"Dicky BhaktiNo ratings yet
- Five-Ring System TheoryDocument36 pagesFive-Ring System TheoryRoy WeiNo ratings yet
- Moelis - Co - 03 - 24 - 2014-Ex-10.19-Strategic Alliance AgreementDocument45 pagesMoelis - Co - 03 - 24 - 2014-Ex-10.19-Strategic Alliance AgreementTe MoNo ratings yet
- 27Th Dod Explosives Safety Seminar: AUGUST 1996Document25 pages27Th Dod Explosives Safety Seminar: AUGUST 1996Mehmet Ali TahancalioNo ratings yet
- Government of Jamica Procurement GuideDocument228 pagesGovernment of Jamica Procurement GuideWilliam NgaleNo ratings yet
- Sec 04 PDFDocument22 pagesSec 04 PDFTalha AltafNo ratings yet
- dsineDN DU ROM Extended DN2 Product Manual 1.0Document2 pagesdsineDN DU ROM Extended DN2 Product Manual 1.0Kaushal SawantNo ratings yet
- Ceramic Fabrication Processes: Treatise on Materials Science and Technology, Vol. 9From EverandCeramic Fabrication Processes: Treatise on Materials Science and Technology, Vol. 9Franklin F. Y. WangNo ratings yet
- Transport Bombers - A Conceptual Shift in Precision-Guided Munitions Delivery (Air University Press, June 1996)Document51 pagesTransport Bombers - A Conceptual Shift in Precision-Guided Munitions Delivery (Air University Press, June 1996)dadis1345No ratings yet
- Diffgeom 1 DDocument142 pagesDiffgeom 1 DMarvin OlavidesNo ratings yet
- Theories of Probability: An Examination of FoundationsFrom EverandTheories of Probability: An Examination of FoundationsRating: 5 out of 5 stars5/5 (1)
- FUTURE WAR PAPER TITLE- Unrestricted Warfare- A Chinese doctrine for future warfare? SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF OPERATIONAL STUDIES AUTHOR- Major John A. Van Messel, USMC .pdfDocument26 pagesFUTURE WAR PAPER TITLE- Unrestricted Warfare- A Chinese doctrine for future warfare? SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF OPERATIONAL STUDIES AUTHOR- Major John A. Van Messel, USMC .pdfDudley DeuxWriteNo ratings yet
- Marine CLIC (Feb 09)Document22 pagesMarine CLIC (Feb 09)pkryanNo ratings yet
- Branches & Sequels 1Document7 pagesBranches & Sequels 1averon14No ratings yet
- Ada 956443Document84 pagesAda 956443Not butterNo ratings yet
- Government Contracts: Cost-Plus-Percentage-of-Costs inDocument142 pagesGovernment Contracts: Cost-Plus-Percentage-of-Costs inNkoleNo ratings yet
- Functorial Reconstruction Theorems For Stacks: BstractDocument36 pagesFunctorial Reconstruction Theorems For Stacks: Bstractmarcel levillerNo ratings yet
- Highermathematic029159mbp PDFDocument537 pagesHighermathematic029159mbp PDFcristobalNo ratings yet
- Young, W.H. The Fundamental Theorems of The Differential CalculusDocument88 pagesYoung, W.H. The Fundamental Theorems of The Differential CalculusMLalli5340100% (1)
- DAU T&E Management GuideDocument319 pagesDAU T&E Management GuideSamuel PeffersNo ratings yet
- AA - SPEC - 114013 - Foundations For Heavy MachineryDocument21 pagesAA - SPEC - 114013 - Foundations For Heavy MachineryJakesNo ratings yet
- BANADocument20 pagesBANAteefaNo ratings yet
- Polymer Science: A Materials Science HandbookFrom EverandPolymer Science: A Materials Science HandbookA. D. JenkinsNo ratings yet
- ADA509340Document24 pagesADA509340aab0989No ratings yet
- Ad 0442757Document237 pagesAd 0442757НикитаNo ratings yet
- Shopping ListDocument52 pagesShopping ListsosoNo ratings yet
- Us DeptDocument87 pagesUs DeptRinaldy SimatupangNo ratings yet
- Sample Co Ownership Agree Two Party InvestmentDocument19 pagesSample Co Ownership Agree Two Party InvestmentftasuxNo ratings yet
- Evaluation of Performance Based LogisticsDocument55 pagesEvaluation of Performance Based LogisticsShivam TrivediNo ratings yet
- Near East University Faculty of Economics Administrative SciencesDocument26 pagesNear East University Faculty of Economics Administrative SciencesCahcahaNo ratings yet
- Immobilized Enzymes For Industrial ReactorsFrom EverandImmobilized Enzymes For Industrial ReactorsRalph MessingNo ratings yet
- ADA499374Document29 pagesADA499374E-Merson AbdisaNo ratings yet
- Stichit SRSDocument146 pagesStichit SRSMuhammad AbubakarNo ratings yet
- Culture and Communication Towards An Eth PDFDocument22 pagesCulture and Communication Towards An Eth PDFPulkit PrajapatiNo ratings yet
- Customer Experience in The B2B Area The Impa - 2021 - Journal of Retailing andDocument7 pagesCustomer Experience in The B2B Area The Impa - 2021 - Journal of Retailing andPulkit PrajapatiNo ratings yet
- FFH201819 Eng PDFDocument106 pagesFFH201819 Eng PDFPulkit PrajapatiNo ratings yet
- Integrated Planning For Product Selection Shelf Space - 2021 - Journal of RetaiDocument11 pagesIntegrated Planning For Product Selection Shelf Space - 2021 - Journal of RetaiPulkit PrajapatiNo ratings yet
- Sample Questions: EXAM 2Document6 pagesSample Questions: EXAM 2Pulkit PrajapatiNo ratings yet
- #Hardikpandya Report: Discussion Intensity ChartDocument3 pages#Hardikpandya Report: Discussion Intensity ChartPulkit PrajapatiNo ratings yet
- Title: Hardik Pandya Data Collected From 11 January, 2019 To 9 February, 2019Document2 pagesTitle: Hardik Pandya Data Collected From 11 January, 2019 To 9 February, 2019Pulkit PrajapatiNo ratings yet
- DSL 04 ProcessesDocument33 pagesDSL 04 ProcessesPulkit PrajapatiNo ratings yet
- Distributed Systems: IntroductionDocument11 pagesDistributed Systems: IntroductionPulkit PrajapatiNo ratings yet
- They Simply Went Straight To Their Target Audience at College Parties, Libraries, Coffee Shops, Bars and Other Places Where They Hang OutDocument1 pageThey Simply Went Straight To Their Target Audience at College Parties, Libraries, Coffee Shops, Bars and Other Places Where They Hang OutPulkit PrajapatiNo ratings yet
- Clique PenDocument2 pagesClique PenPulkit PrajapatiNo ratings yet
- Request For Proposal "Empanelment of Indian Institute of Management, Jammu (Iim Jammu) "Document11 pagesRequest For Proposal "Empanelment of Indian Institute of Management, Jammu (Iim Jammu) "Pulkit PrajapatiNo ratings yet
- Currently Clique Pens Is Stuck in A Situation Where They Are Competing With Other Pen Brands Including BICDocument1 pageCurrently Clique Pens Is Stuck in A Situation Where They Are Competing With Other Pen Brands Including BICPulkit PrajapatiNo ratings yet
- Stata CommandsDocument3 pagesStata CommandsSandra DeeNo ratings yet
- Worksheet 1 Refresher ANSWERSDocument8 pagesWorksheet 1 Refresher ANSWERSAndrea De JesusNo ratings yet
- Neural ComputingDocument13 pagesNeural ComputingMilruwan PereraNo ratings yet
- Introduction To Research in Education 9th Edition Ary Test BankDocument26 pagesIntroduction To Research in Education 9th Edition Ary Test Bankbrittanywilliamsonxpmzdnebgt100% (33)
- Srikanth Sastry Et Al - Statistical Geometry of Particle Packings. II. Weak Spots'' in LiquidsDocument11 pagesSrikanth Sastry Et Al - Statistical Geometry of Particle Packings. II. Weak Spots'' in LiquidsSodaMoussezNo ratings yet
- Full Download Ebook PDF Applied Statistics and Probability For Engineers 6th Edition PDFDocument41 pagesFull Download Ebook PDF Applied Statistics and Probability For Engineers 6th Edition PDFapril.cash242100% (42)
- Math Reflection Final WebDocument3 pagesMath Reflection Final Webapi-270549230No ratings yet
- The Influence of The Radec Learning Model On Advanced Social Studies Learning On The Critical Thinking Skills of PGSD StudentsDocument4 pagesThe Influence of The Radec Learning Model On Advanced Social Studies Learning On The Critical Thinking Skills of PGSD Studentsdebyyunita.2022No ratings yet
- 2121-Article Text-9456-1-10-20230131Document8 pages2121-Article Text-9456-1-10-20230131Çağdaş BaytarNo ratings yet
- Inquiries Investigation and Immersion Reviewer First SemesterDocument5 pagesInquiries Investigation and Immersion Reviewer First SemesterbabzNo ratings yet
- Kruskal WallisDocument8 pagesKruskal WallisdrkameshNo ratings yet
- Lect8 PDFDocument20 pagesLect8 PDFEsamul HaqNo ratings yet
- Chapter 6 - Correlation - Multiple Choice Questions ANSWERSDocument5 pagesChapter 6 - Correlation - Multiple Choice Questions ANSWERSAdeel NawazNo ratings yet
- Sampling DistributionDocument13 pagesSampling DistributionASHISH100% (3)
- 2009 - Einarsen (NAQ-R22) Article PDFDocument22 pages2009 - Einarsen (NAQ-R22) Article PDFFernandoCedroNo ratings yet
- Ejercicios Cap3 ProduccionDocument4 pagesEjercicios Cap3 ProduccionLuz De LunaNo ratings yet
- Comparative Analysis On Dimension Reduction Algorithm of Principal Component Analysis and Singular Value Decomposition For ClusteringDocument8 pagesComparative Analysis On Dimension Reduction Algorithm of Principal Component Analysis and Singular Value Decomposition For ClusteringElly MuningsihNo ratings yet
- 2.3.2.7. Quiz 2 (Module 2)Document13 pages2.3.2.7. Quiz 2 (Module 2)Secret AdmirerNo ratings yet
- Sample 1 - Mini Project - Eposter - ReportDocument4 pagesSample 1 - Mini Project - Eposter - ReportZac DragoNo ratings yet
- Mek4450 Marine Operations ExercisesDocument13 pagesMek4450 Marine Operations ExercisesdsrfgNo ratings yet
- PB SD To LGA Mapping Data RulesDocument2 pagesPB SD To LGA Mapping Data RulesBobNo ratings yet
- Analysis of Facial Skin Thickness: Defining The Relative Thickness IndexDocument5 pagesAnalysis of Facial Skin Thickness: Defining The Relative Thickness Indexxj112358No ratings yet
- EE 720 HW Set 2Document3 pagesEE 720 HW Set 2Abdullah AL-RazemNo ratings yet
- Exercises - Ge 4 Mathematics in The Modern WorldDocument7 pagesExercises - Ge 4 Mathematics in The Modern WorldMervin Jason Nicavera BonsolNo ratings yet
- CH7 Prob SuppDocument5 pagesCH7 Prob SuppEugen Nieder JochumNo ratings yet






































































































Download as pdf or txt
You might also like
- Pilgrim Bank - Case StudyDocument14 pagesPilgrim Bank - Case StudyRachit Kulshrestha97% (39)
- Customer Churn Data - A Project Based On Logistic RegressionDocument31 pagesCustomer Churn Data - A Project Based On Logistic RegressionShyam Kishore Tripathi100% (12)
- Microemulsions Theory and PracticeFrom EverandMicroemulsions Theory and PracticeLeon PrinceRating: 5 out of 5 stars5/5 (1)
- Unit 31 Statistics For ManagementAssignment 1 (LO1 - LOs) 1Document3 pagesUnit 31 Statistics For ManagementAssignment 1 (LO1 - LOs) 1H A0% (1)
- Macroeconomic Theory, Thomas SargentDocument544 pagesMacroeconomic Theory, Thomas SargentEzequiel Lopez Mondo50% (2)
- Customer Insights Analyst TaskDocument3 pagesCustomer Insights Analyst TaskPulkit PrajapatiNo ratings yet
- Mth302 Quiz 4 SOlvedDocument17 pagesMth302 Quiz 4 SOlvedHafeez SaleemiNo ratings yet
- Statistical Analysis PlanDocument92 pagesStatistical Analysis PlanhimeshagrawalNo ratings yet
- Summary of Game Play 2 I. Scenario Selection 2 II. Airborne Drops 3Document11 pagesSummary of Game Play 2 I. Scenario Selection 2 II. Airborne Drops 3Mark BallingerNo ratings yet
- The High-Precision Tulip - Development and Combat Employment of The Soviet Laser-Guided Mortar RoundDocument5 pagesThe High-Precision Tulip - Development and Combat Employment of The Soviet Laser-Guided Mortar Roundscorpion_l_81No ratings yet
- 1997integrated Battlefield Management Begins in SpaceADA442715Document12 pages1997integrated Battlefield Management Begins in SpaceADA442715Huanghe XiaoNo ratings yet
- DETAIL OF PILE FOUNDATION FOR MMS-Foundation Drawing 450dia Pile - TalcherDocument1 pageDETAIL OF PILE FOUNDATION FOR MMS-Foundation Drawing 450dia Pile - Talcherranvijaysingh2002100% (2)
- In Search of Identity: An Autobiography: Anwar El-Sadat (Rev. Ed. 1992)Document11 pagesIn Search of Identity: An Autobiography: Anwar El-Sadat (Rev. Ed. 1992)Andrian NasirNo ratings yet
- Fifty Questions For Doctrine Writers: Means Are As Important As EndsDocument6 pagesFifty Questions For Doctrine Writers: Means Are As Important As EndszeinnourNo ratings yet
- Essays On Flexible Exchange Rates - Paul R. KrugmanDocument116 pagesEssays On Flexible Exchange Rates - Paul R. KrugmanEdwin JudeNo ratings yet
- Seminar ContentsDocument1 pageSeminar ContentsAbhinandan SridharNo ratings yet
- ContentsDocument1 pageContentsAbhinandan SridharNo ratings yet
- Bases de Kalman Con RiccatiDocument48 pagesBases de Kalman Con RiccatiGustavo Omar Mesones MálagaNo ratings yet
- Center of GravityDocument9 pagesCenter of GravityAtaur RahmanNo ratings yet
- Ayman Al-Zawahiri: The Ideologue of Modern Islamic MilitancyDocument32 pagesAyman Al-Zawahiri: The Ideologue of Modern Islamic MilitancymeltNo ratings yet
- RDTSMS0017 A-1 Carbon Steel and High-Strength Low-Alloy For Shock Absorber Components - 27 - 11 - 20Document11 pagesRDTSMS0017 A-1 Carbon Steel and High-Strength Low-Alloy For Shock Absorber Components - 27 - 11 - 20Tayná RibeiroNo ratings yet
- Ada 637751Document50 pagesAda 637751OdicoNo ratings yet
- Deception OperationsDocument41 pagesDeception OperationsRocketoRussiaNo ratings yet
- PEACEKEEPING A Selected Bibliography 2009Document36 pagesPEACEKEEPING A Selected Bibliography 2009HipHop LabaratorijaNo ratings yet
- Introduction To Differantiable Manifolds-Notes-2012 PDFDocument132 pagesIntroduction To Differantiable Manifolds-Notes-2012 PDFHigher Education Complex of Bam ResearchNo ratings yet
- Chapter 1: Introduction 1: Department of EconomicsDocument2 pagesChapter 1: Introduction 1: Department of EconomicsHira DollNo ratings yet
- TTO-4 IMP Pipe Wrinkle Integrity DeterminationDocument91 pagesTTO-4 IMP Pipe Wrinkle Integrity Determinationthienle0228No ratings yet
- Mechanics of Structure IIDocument3 pagesMechanics of Structure IIMijanur RahamanNo ratings yet
- Mechanics of Structure II PDFDocument3 pagesMechanics of Structure II PDFMijanur RahamanNo ratings yet
- Tampoane Elastice PaulstraDocument150 pagesTampoane Elastice PaulstraStoianovici CristianNo ratings yet
- BstractDocument40 pagesBstractFRANK BULA MARTINEZNo ratings yet
- Combined ReportDocument118 pagesCombined ReportArijit SahaNo ratings yet
- Principlesofscie 02 JevouoftDocument496 pagesPrinciplesofscie 02 JevouoftBranko NikolicNo ratings yet
- VALUATION REPORT #00071921: Various Properties Together Known As "Mirland Development Corporation Assets"Document79 pagesVALUATION REPORT #00071921: Various Properties Together Known As "Mirland Development Corporation Assets"Dicky BhaktiNo ratings yet
- Five-Ring System TheoryDocument36 pagesFive-Ring System TheoryRoy WeiNo ratings yet
- Moelis - Co - 03 - 24 - 2014-Ex-10.19-Strategic Alliance AgreementDocument45 pagesMoelis - Co - 03 - 24 - 2014-Ex-10.19-Strategic Alliance AgreementTe MoNo ratings yet
- 27Th Dod Explosives Safety Seminar: AUGUST 1996Document25 pages27Th Dod Explosives Safety Seminar: AUGUST 1996Mehmet Ali TahancalioNo ratings yet
- Government of Jamica Procurement GuideDocument228 pagesGovernment of Jamica Procurement GuideWilliam NgaleNo ratings yet
- Sec 04 PDFDocument22 pagesSec 04 PDFTalha AltafNo ratings yet
- dsineDN DU ROM Extended DN2 Product Manual 1.0Document2 pagesdsineDN DU ROM Extended DN2 Product Manual 1.0Kaushal SawantNo ratings yet
- Ceramic Fabrication Processes: Treatise on Materials Science and Technology, Vol. 9From EverandCeramic Fabrication Processes: Treatise on Materials Science and Technology, Vol. 9Franklin F. Y. WangNo ratings yet
- Transport Bombers - A Conceptual Shift in Precision-Guided Munitions Delivery (Air University Press, June 1996)Document51 pagesTransport Bombers - A Conceptual Shift in Precision-Guided Munitions Delivery (Air University Press, June 1996)dadis1345No ratings yet
- Diffgeom 1 DDocument142 pagesDiffgeom 1 DMarvin OlavidesNo ratings yet
- Theories of Probability: An Examination of FoundationsFrom EverandTheories of Probability: An Examination of FoundationsRating: 5 out of 5 stars5/5 (1)
- FUTURE WAR PAPER TITLE- Unrestricted Warfare- A Chinese doctrine for future warfare? SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF OPERATIONAL STUDIES AUTHOR- Major John A. Van Messel, USMC .pdfDocument26 pagesFUTURE WAR PAPER TITLE- Unrestricted Warfare- A Chinese doctrine for future warfare? SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF OPERATIONAL STUDIES AUTHOR- Major John A. Van Messel, USMC .pdfDudley DeuxWriteNo ratings yet
- Marine CLIC (Feb 09)Document22 pagesMarine CLIC (Feb 09)pkryanNo ratings yet
- Branches & Sequels 1Document7 pagesBranches & Sequels 1averon14No ratings yet
- Ada 956443Document84 pagesAda 956443Not butterNo ratings yet
- Government Contracts: Cost-Plus-Percentage-of-Costs inDocument142 pagesGovernment Contracts: Cost-Plus-Percentage-of-Costs inNkoleNo ratings yet
- Functorial Reconstruction Theorems For Stacks: BstractDocument36 pagesFunctorial Reconstruction Theorems For Stacks: Bstractmarcel levillerNo ratings yet
- Highermathematic029159mbp PDFDocument537 pagesHighermathematic029159mbp PDFcristobalNo ratings yet
- Young, W.H. The Fundamental Theorems of The Differential CalculusDocument88 pagesYoung, W.H. The Fundamental Theorems of The Differential CalculusMLalli5340100% (1)
- DAU T&E Management GuideDocument319 pagesDAU T&E Management GuideSamuel PeffersNo ratings yet
- AA - SPEC - 114013 - Foundations For Heavy MachineryDocument21 pagesAA - SPEC - 114013 - Foundations For Heavy MachineryJakesNo ratings yet
- BANADocument20 pagesBANAteefaNo ratings yet
- Polymer Science: A Materials Science HandbookFrom EverandPolymer Science: A Materials Science HandbookA. D. JenkinsNo ratings yet
- ADA509340Document24 pagesADA509340aab0989No ratings yet
- Ad 0442757Document237 pagesAd 0442757НикитаNo ratings yet
- Shopping ListDocument52 pagesShopping ListsosoNo ratings yet
- Us DeptDocument87 pagesUs DeptRinaldy SimatupangNo ratings yet
- Sample Co Ownership Agree Two Party InvestmentDocument19 pagesSample Co Ownership Agree Two Party InvestmentftasuxNo ratings yet
- Evaluation of Performance Based LogisticsDocument55 pagesEvaluation of Performance Based LogisticsShivam TrivediNo ratings yet
- Near East University Faculty of Economics Administrative SciencesDocument26 pagesNear East University Faculty of Economics Administrative SciencesCahcahaNo ratings yet
- Immobilized Enzymes For Industrial ReactorsFrom EverandImmobilized Enzymes For Industrial ReactorsRalph MessingNo ratings yet
- ADA499374Document29 pagesADA499374E-Merson AbdisaNo ratings yet
- Stichit SRSDocument146 pagesStichit SRSMuhammad AbubakarNo ratings yet
- Culture and Communication Towards An Eth PDFDocument22 pagesCulture and Communication Towards An Eth PDFPulkit PrajapatiNo ratings yet
- Customer Experience in The B2B Area The Impa - 2021 - Journal of Retailing andDocument7 pagesCustomer Experience in The B2B Area The Impa - 2021 - Journal of Retailing andPulkit PrajapatiNo ratings yet
- FFH201819 Eng PDFDocument106 pagesFFH201819 Eng PDFPulkit PrajapatiNo ratings yet
- Integrated Planning For Product Selection Shelf Space - 2021 - Journal of RetaiDocument11 pagesIntegrated Planning For Product Selection Shelf Space - 2021 - Journal of RetaiPulkit PrajapatiNo ratings yet
- Sample Questions: EXAM 2Document6 pagesSample Questions: EXAM 2Pulkit PrajapatiNo ratings yet
- #Hardikpandya Report: Discussion Intensity ChartDocument3 pages#Hardikpandya Report: Discussion Intensity ChartPulkit PrajapatiNo ratings yet
- Title: Hardik Pandya Data Collected From 11 January, 2019 To 9 February, 2019Document2 pagesTitle: Hardik Pandya Data Collected From 11 January, 2019 To 9 February, 2019Pulkit PrajapatiNo ratings yet
- DSL 04 ProcessesDocument33 pagesDSL 04 ProcessesPulkit PrajapatiNo ratings yet
- Distributed Systems: IntroductionDocument11 pagesDistributed Systems: IntroductionPulkit PrajapatiNo ratings yet
- They Simply Went Straight To Their Target Audience at College Parties, Libraries, Coffee Shops, Bars and Other Places Where They Hang OutDocument1 pageThey Simply Went Straight To Their Target Audience at College Parties, Libraries, Coffee Shops, Bars and Other Places Where They Hang OutPulkit PrajapatiNo ratings yet
- Clique PenDocument2 pagesClique PenPulkit PrajapatiNo ratings yet
- Request For Proposal "Empanelment of Indian Institute of Management, Jammu (Iim Jammu) "Document11 pagesRequest For Proposal "Empanelment of Indian Institute of Management, Jammu (Iim Jammu) "Pulkit PrajapatiNo ratings yet
- Currently Clique Pens Is Stuck in A Situation Where They Are Competing With Other Pen Brands Including BICDocument1 pageCurrently Clique Pens Is Stuck in A Situation Where They Are Competing With Other Pen Brands Including BICPulkit PrajapatiNo ratings yet
- Stata CommandsDocument3 pagesStata CommandsSandra DeeNo ratings yet
- Worksheet 1 Refresher ANSWERSDocument8 pagesWorksheet 1 Refresher ANSWERSAndrea De JesusNo ratings yet
- Neural ComputingDocument13 pagesNeural ComputingMilruwan PereraNo ratings yet
- Introduction To Research in Education 9th Edition Ary Test BankDocument26 pagesIntroduction To Research in Education 9th Edition Ary Test Bankbrittanywilliamsonxpmzdnebgt100% (33)
- Srikanth Sastry Et Al - Statistical Geometry of Particle Packings. II. Weak Spots'' in LiquidsDocument11 pagesSrikanth Sastry Et Al - Statistical Geometry of Particle Packings. II. Weak Spots'' in LiquidsSodaMoussezNo ratings yet
- Full Download Ebook PDF Applied Statistics and Probability For Engineers 6th Edition PDFDocument41 pagesFull Download Ebook PDF Applied Statistics and Probability For Engineers 6th Edition PDFapril.cash242100% (42)
- Math Reflection Final WebDocument3 pagesMath Reflection Final Webapi-270549230No ratings yet
- The Influence of The Radec Learning Model On Advanced Social Studies Learning On The Critical Thinking Skills of PGSD StudentsDocument4 pagesThe Influence of The Radec Learning Model On Advanced Social Studies Learning On The Critical Thinking Skills of PGSD Studentsdebyyunita.2022No ratings yet
- 2121-Article Text-9456-1-10-20230131Document8 pages2121-Article Text-9456-1-10-20230131Çağdaş BaytarNo ratings yet
- Inquiries Investigation and Immersion Reviewer First SemesterDocument5 pagesInquiries Investigation and Immersion Reviewer First SemesterbabzNo ratings yet
- Kruskal WallisDocument8 pagesKruskal WallisdrkameshNo ratings yet
- Lect8 PDFDocument20 pagesLect8 PDFEsamul HaqNo ratings yet
- Chapter 6 - Correlation - Multiple Choice Questions ANSWERSDocument5 pagesChapter 6 - Correlation - Multiple Choice Questions ANSWERSAdeel NawazNo ratings yet
- Sampling DistributionDocument13 pagesSampling DistributionASHISH100% (3)
- 2009 - Einarsen (NAQ-R22) Article PDFDocument22 pages2009 - Einarsen (NAQ-R22) Article PDFFernandoCedroNo ratings yet
- Ejercicios Cap3 ProduccionDocument4 pagesEjercicios Cap3 ProduccionLuz De LunaNo ratings yet
- Comparative Analysis On Dimension Reduction Algorithm of Principal Component Analysis and Singular Value Decomposition For ClusteringDocument8 pagesComparative Analysis On Dimension Reduction Algorithm of Principal Component Analysis and Singular Value Decomposition For ClusteringElly MuningsihNo ratings yet
- 2.3.2.7. Quiz 2 (Module 2)Document13 pages2.3.2.7. Quiz 2 (Module 2)Secret AdmirerNo ratings yet
- Sample 1 - Mini Project - Eposter - ReportDocument4 pagesSample 1 - Mini Project - Eposter - ReportZac DragoNo ratings yet
- Mek4450 Marine Operations ExercisesDocument13 pagesMek4450 Marine Operations ExercisesdsrfgNo ratings yet
- PB SD To LGA Mapping Data RulesDocument2 pagesPB SD To LGA Mapping Data RulesBobNo ratings yet
- Analysis of Facial Skin Thickness: Defining The Relative Thickness IndexDocument5 pagesAnalysis of Facial Skin Thickness: Defining The Relative Thickness Indexxj112358No ratings yet
- EE 720 HW Set 2Document3 pagesEE 720 HW Set 2Abdullah AL-RazemNo ratings yet
- Exercises - Ge 4 Mathematics in The Modern WorldDocument7 pagesExercises - Ge 4 Mathematics in The Modern WorldMervin Jason Nicavera BonsolNo ratings yet
- CH7 Prob SuppDocument5 pagesCH7 Prob SuppEugen Nieder JochumNo ratings yet