Download as pdf or txt
You might also like
- Otis Sigma SI210 PDFDocument345 pagesOtis Sigma SI210 PDFAnthony Rafaga Ortiz91% (11)
- ARD MANUAL (Huacheng)Document6 pagesARD MANUAL (Huacheng)itok14 RomanistiNo ratings yet
- Sme56800a FM8900S PDFDocument264 pagesSme56800a FM8900S PDFArnold de VosNo ratings yet
- 06 - IRIS - NV - Parameter - PPT (Compatibility Mode)Document30 pages06 - IRIS - NV - Parameter - PPT (Compatibility Mode)Moises PerelloNo ratings yet
- gm5621-LF-AA Genesis LCD Controller PDFDocument66 pagesgm5621-LF-AA Genesis LCD Controller PDFcarlosmg4100% (1)
- MUSE ED Elevator: Start-UpDocument8 pagesMUSE ED Elevator: Start-UpMoises PerelloNo ratings yet
- MUSE ED Elevator: Installation ManualDocument9 pagesMUSE ED Elevator: Installation ManualMoises PerelloNo ratings yet
- 02 - Muse Ed - SR-02-0Document11 pages02 - Muse Ed - SR-02-0Moises PerelloNo ratings yet
- 4 - Adjusting High-Speed Commissioning PDFDocument19 pages4 - Adjusting High-Speed Commissioning PDFQuang Pham DuyNo ratings yet
- Fuji Diagram Mcb-V5 Ver.14.03Document32 pagesFuji Diagram Mcb-V5 Ver.14.03natekpratamamandiri100% (1)
- 04 - Muse Ed - SR-02-0-PCB - 090327Document48 pages04 - Muse Ed - SR-02-0-PCB - 090327Moises PerelloNo ratings yet
- Elevator Programming CodeDocument178 pagesElevator Programming Code100mphNo ratings yet
- LEHY (C) & LEHY - MRL Test & Commissioning Error CodeDocument44 pagesLEHY (C) & LEHY - MRL Test & Commissioning Error Codebao theNo ratings yet
- System - Diagram - EC3000A 5R5 011 4 (UPS EPM)Document24 pagesSystem - Diagram - EC3000A 5R5 011 4 (UPS EPM)Hùng VĩNo ratings yet
- 3 - High-Speed CommissioningDocument29 pages3 - High-Speed CommissioningQuang Pham DuyNo ratings yet
- A1000Document8 pagesA1000monikaNo ratings yet
- MUSE ED Elevator: Installation ManualDocument9 pagesMUSE ED Elevator: Installation ManualMoises Perello100% (1)
- Di1 Spec. Address ListDocument45 pagesDi1 Spec. Address ListQuang Pham DuyNo ratings yet
- WQ137099.2 TR MR Ed3Document7 pagesWQ137099.2 TR MR Ed3Juyel JahanNo ratings yet
- WBVF Low, Highspeed Test (Finished) 0227Document37 pagesWBVF Low, Highspeed Test (Finished) 0227kolwin .chindwinNo ratings yet
- Muse Ed /: Trouble ShootingDocument10 pagesMuse Ed /: Trouble ShootingMoises PerelloNo ratings yet
- Di1 (Si210) Elevator /: Trouble ShootingDocument7 pagesDi1 (Si210) Elevator /: Trouble Shootingkolwin .chindwinNo ratings yet
- MUSE ED Elevator: Installation ManualDocument29 pagesMUSE ED Elevator: Installation ManualMoises PerelloNo ratings yet
- Di B'rite Elevator: Installation ManualDocument26 pagesDi B'rite Elevator: Installation ManualIshtiaq HussainNo ratings yet
- T18K027Document12 pagesT18K027Hong Nguyen MaiNo ratings yet
- 09 - Muse Ed-Ts-03-0 - 090330 - TCD136-147Document6 pages09 - Muse Ed-Ts-03-0 - 090330 - TCD136-147Moises PerelloNo ratings yet
- Unidentified Alarm Occurrence / Run CPU Address Error: TCD-002 TCD - 003Document1 pageUnidentified Alarm Occurrence / Run CPU Address Error: TCD-002 TCD - 003NoahNo ratings yet
- Muse Ed /: Trouble ShootingDocument9 pagesMuse Ed /: Trouble ShootingMoises PerelloNo ratings yet
- 12 - Muse Ed-Ts-03-0 - 090330 - TCD191-240Document20 pages12 - Muse Ed-Ts-03-0 - 090330 - TCD191-240Moises PerelloNo ratings yet
- Screenshot 2021-04-17 at 6.09.21 PMDocument9 pagesScreenshot 2021-04-17 at 6.09.21 PMMaria ShibuNo ratings yet
- Escalator Control Panel MTCC-E1Document13 pagesEscalator Control Panel MTCC-E1yoen_an100% (1)
- LCE 1 En.-.1Document49 pagesLCE 1 En.-.1Felipe InostrozaNo ratings yet
- PoDocument76 pagesPoEmreNo ratings yet
- T18D041Document14 pagesT18D041Hong Nguyen MaiNo ratings yet
- Faults ARCA IIDocument13 pagesFaults ARCA IIStefan PopovNo ratings yet
- F U J I: Ud Tren Main Dieu KhienDocument3 pagesF U J I: Ud Tren Main Dieu KhiendongbahienNo ratings yet
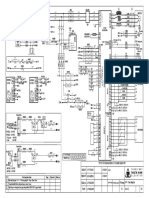
- Schematic Diagram MCB-V6-En Ver.18.06 Rev.1 (GEEC)Document44 pagesSchematic Diagram MCB-V6-En Ver.18.06 Rev.1 (GEEC)Mohamed AdamNo ratings yet
- Encoder E-ZKD-25 For Mitsubishi LiftDocument2 pagesEncoder E-ZKD-25 For Mitsubishi LiftRaul GutierrezNo ratings yet
- Title DI1 (60 105m/min) Annunciator Function Setting ModeDocument12 pagesTitle DI1 (60 105m/min) Annunciator Function Setting ModeQuang Pham DuyNo ratings yet
- Error Code Table: F E D C B A 9 8 7 6 5 4 3 2 1Document7 pagesError Code Table: F E D C B A 9 8 7 6 5 4 3 2 1Mohammad HaiderNo ratings yet
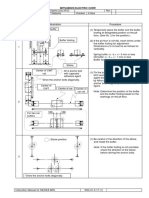
- Escalator Switches AdjustmentDocument6 pagesEscalator Switches AdjustmentSANAL KUMAR SNo ratings yet
- Muse Ed /: Trouble ShootingDocument11 pagesMuse Ed /: Trouble ShootingMoises PerelloNo ratings yet
- LS Elevator'Document1 pageLS Elevator'Mitro JeNo ratings yet
- Technical Specification (LG Rise) : ControlDocument6 pagesTechnical Specification (LG Rise) : ControlAntr HasanNo ratings yet
- MP - Drawing - Khach San Hai Thuy - Update 24-03-2021Document59 pagesMP - Drawing - Khach San Hai Thuy - Update 24-03-2021Tiến PhúcNo ratings yet
- Yaskawa: Power 24VDC, 5VDCDocument1 pageYaskawa: Power 24VDC, 5VDCNghia Huynh HoangNo ratings yet
- Fuji Drive Parameters: Func. Description Multi LM Multi ACE Mini Connection VFD TerminalDocument1 pageFuji Drive Parameters: Func. Description Multi LM Multi ACE Mini Connection VFD TerminalJaouad LahdarNo ratings yet
- Wire Rope Lubricant PDFDocument1 pageWire Rope Lubricant PDFGutmonarchNo ratings yet
- Prepared Oyama (July 2012) Rev. WIG-21 Checked T.Natsume Checked K.HaraDocument18 pagesPrepared Oyama (July 2012) Rev. WIG-21 Checked T.Natsume Checked K.HaraEtienneNo ratings yet
- 07 SINCOS LoadSettingDocument7 pages07 SINCOS LoadSettingtran xobonNo ratings yet
- Hitachi (2Document20 pagesHitachi (2Tushar BallabhNo ratings yet
- Esquemas KONE 2009 PDFDocument35 pagesEsquemas KONE 2009 PDFkristerNo ratings yet
- Hotel Santika - Tmii 4LTDocument24 pagesHotel Santika - Tmii 4LTGogik AntoNo ratings yet
- MicoDocument24 pagesMicoTianNo ratings yet
- SJT-WVF-V Group Control User Manual (Version 2018) : Shenyang Bluelight 2018.7.9Document16 pagesSJT-WVF-V Group Control User Manual (Version 2018) : Shenyang Bluelight 2018.7.9mohammedalathwary100% (2)
- Đấu Nối - EC160 PDFDocument8 pagesĐấu Nối - EC160 PDFHùng VĩNo ratings yet
- Otis Xizi Acd2 MRL Diagramas XAA21310ASDocument93 pagesOtis Xizi Acd2 MRL Diagramas XAA21310ASDonaldo SitunNo ratings yet
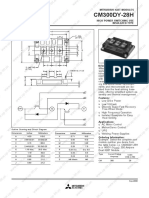
- Mitsubishi IGBT CM300DY-28HDocument4 pagesMitsubishi IGBT CM300DY-28HRaul Gutierrez100% (1)
- Si210 TS 02 1 - TCD191 237 (97 109)Document18 pagesSi210 TS 02 1 - TCD191 237 (97 109)FERNS0% (1)
- TCD 107 SD1U ON Trouble: Detection ApplicationDocument7 pagesTCD 107 SD1U ON Trouble: Detection ApplicationFERNSNo ratings yet
- Start Up Sigma Solon LDDocument7 pagesStart Up Sigma Solon LDJesus Checa100% (1)
- User Manual: Safety Module Sm-EDocument28 pagesUser Manual: Safety Module Sm-Eait mimouneNo ratings yet
- Delta2 - MNF13001EN R101 490Document46 pagesDelta2 - MNF13001EN R101 490Mahmoud OmarNo ratings yet
- Controller Traning - PPT (Compatibility Mode)Document87 pagesController Traning - PPT (Compatibility Mode)Moises PerelloNo ratings yet
- 02 MUSE ACD3 T&C WiringDocument15 pages02 MUSE ACD3 T&C WiringMoises PerelloNo ratings yet
- IRIS - NV Control Panel: Regenerative Resistance ERO Panel Brake Resistance TransDocument20 pagesIRIS - NV Control Panel: Regenerative Resistance ERO Panel Brake Resistance TransMoises Perello100% (1)
- In - and Output Car Board (IOCB)Document2 pagesIn - and Output Car Board (IOCB)Moises PerelloNo ratings yet
- Esquema Electrico Acd2 ControllerDocument11 pagesEsquema Electrico Acd2 ControllerMoises Perello100% (1)
- Esquema Electrico Acd2 ControllerDocument11 pagesEsquema Electrico Acd2 ControllerMoises Perello100% (1)
- 01 - Control BoxDocument2 pages01 - Control BoxMoises PerelloNo ratings yet
- MUSE ED Elevator: Installation ManualDocument13 pagesMUSE ED Elevator: Installation ManualMoises PerelloNo ratings yet
- 0 - Start Up Routine ManualDocument2 pages0 - Start Up Routine ManualMoises PerelloNo ratings yet
- 06 - High Speed AdjustmentDocument3 pages06 - High Speed AdjustmentMoises PerelloNo ratings yet
- STEP SVT - ToolDocument22 pagesSTEP SVT - ToolMoises PerelloNo ratings yet
- Iris NV Iris NV - Parameter Parameter: Speed Curve Configuration: F00 F05Document32 pagesIris NV Iris NV - Parameter Parameter: Speed Curve Configuration: F00 F05Moises PerelloNo ratings yet
- 06 - Muse Ed-Ts-03-0 - 090330 - TCD83-101Document19 pages06 - Muse Ed-Ts-03-0 - 090330 - TCD83-101Moises PerelloNo ratings yet
- MUSE ED Elevator: Installation ManualDocument16 pagesMUSE ED Elevator: Installation ManualMoises PerelloNo ratings yet
- 02 - Muse Ed - SR-02-0Document11 pages02 - Muse Ed - SR-02-0Moises PerelloNo ratings yet
- Muse Ed /: Trouble ShootingDocument10 pagesMuse Ed /: Trouble ShootingMoises PerelloNo ratings yet
- MUSE ED Elevator: Installation ManualDocument2 pagesMUSE ED Elevator: Installation ManualMoises PerelloNo ratings yet
- MUSE ED Elevator: Installation ManualDocument6 pagesMUSE ED Elevator: Installation ManualMoises PerelloNo ratings yet
- MUSE ED Elevator: Installation ManualDocument5 pagesMUSE ED Elevator: Installation ManualMoises PerelloNo ratings yet
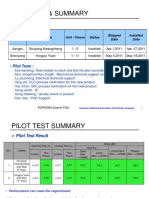
- Pilot List & SummaryDocument6 pagesPilot List & SummaryMoises PerelloNo ratings yet
- 06 - Muse Ed-Ts-03-0 - 090330 - TCD83-101Document19 pages06 - Muse Ed-Ts-03-0 - 090330 - TCD83-101Moises PerelloNo ratings yet
- Service Manual: Color TelevisionDocument21 pagesService Manual: Color TelevisionLuis MorenoNo ratings yet
- Crude Wireless Charger SynopsesDocument4 pagesCrude Wireless Charger SynopsesNawazish KhanNo ratings yet
- 12bits Serie SPI AdcDocument34 pages12bits Serie SPI Adclucas_guerrero2No ratings yet
- T Rec Y.1541 201112 I!!pdf eDocument24 pagesT Rec Y.1541 201112 I!!pdf eSwapnil NageNo ratings yet
- Intel Haswell-MDocument60 pagesIntel Haswell-Mstbuk2013No ratings yet
- SanDisk® Industrial iNAND™ Embedded Flash DriveDocument38 pagesSanDisk® Industrial iNAND™ Embedded Flash Driveplinio_de_paula100% (1)
- A Method of Line Fault Location Based On Traveling Wave TheoryDocument10 pagesA Method of Line Fault Location Based On Traveling Wave TheorySuginoMarwotoNo ratings yet
- Unit 1a - Introduction of E.SDocument45 pagesUnit 1a - Introduction of E.SNanaNo ratings yet
- Jy 997 D 26101 BDocument208 pagesJy 997 D 26101 BAgha Ali KhanNo ratings yet
- Arduino ppt-1Document25 pagesArduino ppt-1Aman NaikyaNo ratings yet
- Lte Enodeb Troubleshooting GuideDocument2 pagesLte Enodeb Troubleshooting GuideKelvin PonceNo ratings yet
- LM 78 L 05Document30 pagesLM 78 L 05Shakthi PriyaNo ratings yet
- Product Specifications Product Specifications: HBX HBX - 3319DS 3319DS - VTM VTMDocument2 pagesProduct Specifications Product Specifications: HBX HBX - 3319DS 3319DS - VTM VTMMario LeónNo ratings yet
- Irons HI 105 HI 108 HI 110 HI 114 HI 116: Philips Domestic Appliances and Personal CareDocument3 pagesIrons HI 105 HI 108 HI 110 HI 114 HI 116: Philips Domestic Appliances and Personal CarepukymottoNo ratings yet
- 2 EC IES Objective Paper II 2015Document31 pages2 EC IES Objective Paper II 2015Debajyoti DattaNo ratings yet
- Microwave Engineering Assignment - Ambuj Arora 0014802813 Applications of Microwave EngineeringDocument8 pagesMicrowave Engineering Assignment - Ambuj Arora 0014802813 Applications of Microwave EngineeringManthan SinghNo ratings yet
- Three-Bead-Balun Reflection Bridge 250 KHZ To 1.5 GHZDocument8 pagesThree-Bead-Balun Reflection Bridge 250 KHZ To 1.5 GHZfreddy brigstoneNo ratings yet
- L6 Resistor FabricationDocument24 pagesL6 Resistor FabricationBajrang BansalNo ratings yet
- ASTRO® Digital XTL™ 5000 O3 Control Head User GuideDocument154 pagesASTRO® Digital XTL™ 5000 O3 Control Head User Guide陈奇No ratings yet
- Para List For GSMDocument5,544 pagesPara List For GSMNeelesh Kumar MareleNo ratings yet
- Peripheral Devices Input-Output Interface Asynchronous Data Transfer Modes of Transfer Priority Interrupt Direct Memory Access Input-Output ProcessorDocument7 pagesPeripheral Devices Input-Output Interface Asynchronous Data Transfer Modes of Transfer Priority Interrupt Direct Memory Access Input-Output ProcessorDivyansh KumarNo ratings yet
- Advance Physics For Grade 10 STE StudentsDocument5 pagesAdvance Physics For Grade 10 STE StudentsJoshua AsuncionNo ratings yet
- Lab Manual Computer Organization and Hardware MaintenanceDocument28 pagesLab Manual Computer Organization and Hardware Maintenanceanshroy7373No ratings yet
- Samsung Le26r71b 72b Le32r71b r72b Le37r72b Le40r71b 72b Chassis-Gbd26ke Gbd32ke Gbd40ke Gbr26ke Gbr32ke Gbr37ke Gbr40ke SMDocument223 pagesSamsung Le26r71b 72b Le32r71b r72b Le37r72b Le40r71b 72b Chassis-Gbd26ke Gbd32ke Gbd40ke Gbr26ke Gbr32ke Gbr37ke Gbr40ke SMCiubotaru Elena100% (1)
- Info - Cispr16!1!2 (Ed1.2) en - D Radio Disturbance and Immunity MeasuringDocument7 pagesInfo - Cispr16!1!2 (Ed1.2) en - D Radio Disturbance and Immunity MeasuringCharles HoNo ratings yet
- Ssc-Je/Rrb-Je/Rsmssb-Je/Dmrc/Psu: by - Vikash Singh Verified Star EducatorDocument31 pagesSsc-Je/Rrb-Je/Rsmssb-Je/Dmrc/Psu: by - Vikash Singh Verified Star EducatorVikash SinghNo ratings yet
- Phasor Diagrams: Hands-On Relay School Wsu - Pullman, WaDocument36 pagesPhasor Diagrams: Hands-On Relay School Wsu - Pullman, WaKel De GuzmanNo ratings yet
- Audio & Music Equipment - ManualDocument21 pagesAudio & Music Equipment - ManualDebbie CarterNo ratings yet