Download as pdf or txt
You might also like
- Indian Abacus Movers Tutor Training Manual - 2nd Level - FreeDocument10 pagesIndian Abacus Movers Tutor Training Manual - 2nd Level - FreeIndian Abacus83% (6)
- Aura Marine Feeder UnitDocument447 pagesAura Marine Feeder UnitImmorthalNo ratings yet
- Interview QuestionsDocument2 pagesInterview QuestionsRam Krishna Vodnala100% (2)
- HisiliconDocument7 pagesHisiliconAlexander WieseNo ratings yet
- Problem Management Mindmap PDFDocument1 pageProblem Management Mindmap PDFmartid58No ratings yet
- Filtering For Speech Enhancement: H H H HDocument4 pagesFiltering For Speech Enhancement: H H H HMuhidin ArifinNo ratings yet
- On-Line Tracking OF Time Varying Using: Harmonics AN Integrated Extended Complex Kalman Filter and Fourierlinear CombinerDocument6 pagesOn-Line Tracking OF Time Varying Using: Harmonics AN Integrated Extended Complex Kalman Filter and Fourierlinear CombinerFabien CallodNo ratings yet
- Analysis of Pilots For Residual Frequency Offset Estimation inDocument5 pagesAnalysis of Pilots For Residual Frequency Offset Estimation inkhajarasool_skNo ratings yet
- Speech Enhancement Using Kalman FilterDocument14 pagesSpeech Enhancement Using Kalman FilterTharunNo ratings yet
- An Introduction To The Kalman FilterDocument16 pagesAn Introduction To The Kalman FilterrsudjianNo ratings yet
- Adaptive Unscented Filtering Technique and Particle Swarm Optimization For Estimation of Non-Stationary Signal ParametersDocument6 pagesAdaptive Unscented Filtering Technique and Particle Swarm Optimization For Estimation of Non-Stationary Signal ParameterssarojxyzNo ratings yet
- Convergence Analysis of Extended KalmanDocument10 pagesConvergence Analysis of Extended Kalmansumathy SNo ratings yet
- Oceans10 BP ComparisonsDocument6 pagesOceans10 BP Comparisonsmaulana_pho2xNo ratings yet
- Generalised Monopulse Estimation and Its PerformanceDocument4 pagesGeneralised Monopulse Estimation and Its PerformanceAbel Blanco FernandezNo ratings yet
- (Abdelhamid - Ladaycia, Anissa - Mokraoui) @univ-Paris13.fr, Adel - Belouchrani@enp - Edu.dz, Karim - Abed-Meraim@Document5 pages(Abdelhamid - Ladaycia, Anissa - Mokraoui) @univ-Paris13.fr, Adel - Belouchrani@enp - Edu.dz, Karim - Abed-Meraim@padmaNo ratings yet
- An Introduction To The Kalman Filter - Greg Welch and Gary BishopDocument16 pagesAn Introduction To The Kalman Filter - Greg Welch and Gary BishophemanthNo ratings yet
- Lecture Notes 10 - Monday 7/10: Summary of Last LectureDocument5 pagesLecture Notes 10 - Monday 7/10: Summary of Last LecturemahdiwisfulNo ratings yet
- An Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsDocument8 pagesAn Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsBrijesh GuptaNo ratings yet
- Harmonic Parameter Estimation of A Power Signal Using FT-RLS AlgorithmDocument5 pagesHarmonic Parameter Estimation of A Power Signal Using FT-RLS AlgorithmFabien CallodNo ratings yet
- Channel Estimation and Optimal Power AllocationDocument10 pagesChannel Estimation and Optimal Power AllocationBelgacemNo ratings yet
- A Robust Frequency Offset Estimation Scheme For OFDM SystemsDocument6 pagesA Robust Frequency Offset Estimation Scheme For OFDM SystemsSoumitra BhowmickNo ratings yet
- Publi 3613Document5 pagesPubli 3613Jay Xueji ZhangNo ratings yet
- Research Article: Efficient Multichannel NLMS Implementation For Acoustic Echo CancellationDocument6 pagesResearch Article: Efficient Multichannel NLMS Implementation For Acoustic Echo Cancellationhassani islamNo ratings yet
- Lin Et AlDocument10 pagesLin Et AlGoran MiljkovicNo ratings yet
- (Tran Etal) - ICASSP2017 - Proportionate NLMS For Adaptive Feedback Control in Hearing AidsDocument5 pages(Tran Etal) - ICASSP2017 - Proportionate NLMS For Adaptive Feedback Control in Hearing AidsTrần MinhNo ratings yet
- A Novel Scheme For Single-Channel Speech Dereverberation: AcousticsDocument15 pagesA Novel Scheme For Single-Channel Speech Dereverberation: AcousticseliasKKNo ratings yet
- Harmonic Estimation in A Power System Using Hybrid H - Adaline AlgorithmDocument6 pagesHarmonic Estimation in A Power System Using Hybrid H - Adaline AlgorithmKubendra RaoNo ratings yet
- Behavioral Modeling of Time-Interleaved ADCs UsingDocument4 pagesBehavioral Modeling of Time-Interleaved ADCs Usingrezam56No ratings yet
- Introduction To Kalman FilterDocument4 pagesIntroduction To Kalman FilterArghya MukherjeeNo ratings yet
- Lacey Thacker TutorialDocument10 pagesLacey Thacker TutorialWilliam Pinto HernándezNo ratings yet
- Kari Roth and Ismo Kauppinen Paulo A. A. Esquef and Vesa V Alim AkiDocument4 pagesKari Roth and Ismo Kauppinen Paulo A. A. Esquef and Vesa V Alim AkiFrederico LopesNo ratings yet
- Politecnico Cji Miluno, Dipartiinento Di Elettronica E Ii$Orriicizione, Leonardo Vinci, 32, 20133,:Hiltun/I Sli1:Cii, Esi ' Le . Oliiiti - ItDocument5 pagesPolitecnico Cji Miluno, Dipartiinento Di Elettronica E Ii$Orriicizione, Leonardo Vinci, 32, 20133,:Hiltun/I Sli1:Cii, Esi ' Le . Oliiiti - ItFabien CallodNo ratings yet
- Analysis of Performance and Implementation Complexity of Array Processing in Anti-Jamming GNSS ReceiversDocument6 pagesAnalysis of Performance and Implementation Complexity of Array Processing in Anti-Jamming GNSS ReceiversImpala RemziNo ratings yet
- Spectral, Phase, and Transient Equalization For Audio SystemsDocument6 pagesSpectral, Phase, and Transient Equalization For Audio Systemsdonald141No ratings yet
- Filtering Noisy ECG Signals Using The Extended Kalman Filter Based On A Modified Dynamic ECG ModelDocument4 pagesFiltering Noisy ECG Signals Using The Extended Kalman Filter Based On A Modified Dynamic ECG ModelKarthik Raj VNo ratings yet
- Robust Adaptive Filtering Approach For Envelope and Harmonic EstimationDocument5 pagesRobust Adaptive Filtering Approach For Envelope and Harmonic EstimationFabien CallodNo ratings yet
- Minimum Cross-Entropy Spectral Analysis: LF'C Analysis Fits An All-Pole Spectral Model To TheDocument8 pagesMinimum Cross-Entropy Spectral Analysis: LF'C Analysis Fits An All-Pole Spectral Model To ThenailgrpNo ratings yet
- Proceedings Letters: Section DiscontinuedDocument2 pagesProceedings Letters: Section DiscontinuedMs AghamiriNo ratings yet
- An Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsDocument8 pagesAn Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsjdnfjngsNo ratings yet
- Regular-Pulse Excitation-A Novel Approach To Effective and Efficient Multipulse Coding of SpeechDocument10 pagesRegular-Pulse Excitation-A Novel Approach To Effective and Efficient Multipulse Coding of SpeechΚουρδιστόςΑνανάςNo ratings yet
- Induction Motor State Estimation Using Tuned Extended Kalman FilterDocument5 pagesInduction Motor State Estimation Using Tuned Extended Kalman FilterZellagui EnergyNo ratings yet
- Signal: Multichannel Sampling For Multiband SignalsDocument6 pagesSignal: Multichannel Sampling For Multiband SignalsTest oneNo ratings yet
- Application of Wave-Number Approach For Room Behaviour Analysis and Absorption Coefficient MeasurementDocument9 pagesApplication of Wave-Number Approach For Room Behaviour Analysis and Absorption Coefficient MeasurementAugustoNo ratings yet
- Common Phase DUE To Phase Noise in Ofdm Estimation and SuppressionDocument5 pagesCommon Phase DUE To Phase Noise in Ofdm Estimation and SuppressionBrudedo FuystolNo ratings yet
- Uncertainty Driven Compensation of Multi-Stream MLP Acoustic Models For Robust ASRDocument4 pagesUncertainty Driven Compensation of Multi-Stream MLP Acoustic Models For Robust ASRFATHURRAHMAN HERNANDA KHASANNo ratings yet
- MIMO-OFDM Channel Estimation Based On Subspace Tracking: Jianxuan Du and Ye (Geoffrey) LiDocument5 pagesMIMO-OFDM Channel Estimation Based On Subspace Tracking: Jianxuan Du and Ye (Geoffrey) LiRutuja ShedsaleNo ratings yet
- Apa Revisited r1Document8 pagesApa Revisited r1Ahmed MohammedNo ratings yet
- Automatic Transfer Function Synthesis From A Bode PlotDocument6 pagesAutomatic Transfer Function Synthesis From A Bode PlotaNo ratings yet
- Alireza JavaheriDocument17 pagesAlireza JavaheriAloke ChatterjeeNo ratings yet
- Adaptive Adjustment of Noise Covariance in Kalman Filter For Dynamic State EstimationDocument5 pagesAdaptive Adjustment of Noise Covariance in Kalman Filter For Dynamic State EstimationPrakrit TyagiNo ratings yet
- Shiroishi - Bearing Condition Diagnostics Via Vibration and Acoustic Emission MeasurementsDocument13 pagesShiroishi - Bearing Condition Diagnostics Via Vibration and Acoustic Emission MeasurementsTudor CostinNo ratings yet
- Project Research PaperDocument4 pagesProject Research PaperlanjaNo ratings yet
- Common Phase Error Due To Phase Noise in Ofdm - Estimation and SuppressionDocument5 pagesCommon Phase Error Due To Phase Noise in Ofdm - Estimation and SuppressionemadhusNo ratings yet
- Kalman FilterDocument11 pagesKalman Filterhubble86No ratings yet
- Unscented Extended Kalman Filter For Target Tracking: Changyun Liu, Penglang Shui, and Song LiDocument5 pagesUnscented Extended Kalman Filter For Target Tracking: Changyun Liu, Penglang Shui, and Song LiNino PrincipatoNo ratings yet
- Performance of An L-SC Receiver Over Kappa-Mu and Eta-Mu Fading ChannelsDocument5 pagesPerformance of An L-SC Receiver Over Kappa-Mu and Eta-Mu Fading ChannelsAhmad Husain HijaziNo ratings yet
- Correspondence: An EM-Based Forward-Backward Kalman Filter For The Estimation of Time-Variant Channels in OFDMDocument7 pagesCorrespondence: An EM-Based Forward-Backward Kalman Filter For The Estimation of Time-Variant Channels in OFDMVijayShindeNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Mathematical Foundations of Information TheoryFrom EverandMathematical Foundations of Information TheoryRating: 3.5 out of 5 stars3.5/5 (9)
- Cohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)From EverandCohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)No ratings yet
- Ce297 B Hw04 Jajurie Nur RanjiDocument3 pagesCe297 B Hw04 Jajurie Nur RanjiRanji JajurieNo ratings yet
- Lsa4 Evaluation FinalDocument2 pagesLsa4 Evaluation FinalDragica Zdraveska100% (1)
- EktaDocument5 pagesEktaVishal ParasharNo ratings yet
- GATE 2015 Information BrochureDocument34 pagesGATE 2015 Information BrochureAdam BlanchardNo ratings yet
- Roberts NewWorldDocument59 pagesRoberts NewWorldSam RobertsNo ratings yet
- Handbook For Presiding OfficersDocument216 pagesHandbook For Presiding OfficersAbhi NavNo ratings yet
- Summary Regulations CaeDocument2 pagesSummary Regulations CaeRomapouniNo ratings yet
- Ventilador Impact 754 Ingles PDFDocument20 pagesVentilador Impact 754 Ingles PDFDavidOrtizNo ratings yet
- Knowledge Management in Universities in Uganda A Social PerspectiveDocument6 pagesKnowledge Management in Universities in Uganda A Social PerspectiveAlexander DeckerNo ratings yet
- Filtration Lab ResultsDocument9 pagesFiltration Lab ResultsgreengogreenNo ratings yet
- M4 501 01 (R0)Document214 pagesM4 501 01 (R0)ksshashidharNo ratings yet
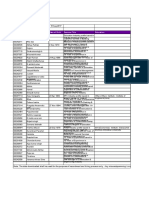
- Replacement Parts Catalog: Agrofarm 420TB GS DT Deutz FahrDocument40 pagesReplacement Parts Catalog: Agrofarm 420TB GS DT Deutz Fahrmanuel mxNo ratings yet
- Detailed Explanation of Seagate F3 Batch CommandsDocument7 pagesDetailed Explanation of Seagate F3 Batch CommandsIman Teguh P100% (1)
- Rule: Spent Nuclear Fuel and High-Level Radioactive Waste Independent Storage Licensing Requirements: Approved Spent Fuel Storage Casks ListDocument2 pagesRule: Spent Nuclear Fuel and High-Level Radioactive Waste Independent Storage Licensing Requirements: Approved Spent Fuel Storage Casks ListJustia.comNo ratings yet
- Formal Verification Seminar Handling Inconclusive Assertions Session JhouDocument32 pagesFormal Verification Seminar Handling Inconclusive Assertions Session JhouabcdNo ratings yet
- Flow of Water by Notch and WeirsDocument17 pagesFlow of Water by Notch and WeirsMuhammad Zulhusni Che RazaliNo ratings yet
- Parents Consent VirtualDocument2 pagesParents Consent VirtualArturo Balboa IIINo ratings yet
- 1.2. COTELCO (July Release-June)Document1 page1.2. COTELCO (July Release-June)jack macabatalNo ratings yet
- 10 Real Problems in India Startups Can Aim To Solve - SocialstoryDocument8 pages10 Real Problems in India Startups Can Aim To Solve - SocialstoryvishalNo ratings yet
- Datasheet (nst3906Document4 pagesDatasheet (nst3906Richard MachadoNo ratings yet
- Annual Report KSSF 2010Document60 pagesAnnual Report KSSF 2010Deepak.OJNo ratings yet
- Cozy Mark IVDocument8 pagesCozy Mark IVproxymo1100% (1)
- ZCSPC College Code PDFDocument132 pagesZCSPC College Code PDFMICHAEL CABILESNo ratings yet
- Presentation On Unsteady AerodynamicsDocument28 pagesPresentation On Unsteady AerodynamicsKiran RameshNo ratings yet
- FANUC Series 30 Improvement of The Feedrate Command When G93/G94/G95 Is ChangedDocument7 pagesFANUC Series 30 Improvement of The Feedrate Command When G93/G94/G95 Is ChangedofanNo ratings yet