Download as pdf or txt
You might also like
- Shimura Correspondence Wee Teck PDFDocument51 pagesShimura Correspondence Wee Teck PDFDao Thinh100% (1)
- Cambridge Maths 7 IndexDocument4 pagesCambridge Maths 7 IndexMax RughfiddNo ratings yet
- Conquering SAT Math Practice Test 1 AnswersDocument18 pagesConquering SAT Math Practice Test 1 AnswerssarahleeabcNo ratings yet
- Ahlgren S - The Sixth, Eighth, Ninth, and Tenth Powers of Ramanujan's Theta Function - Proc. Amer. Math. Soc. 128 (2000) No.5 1333-1338Document6 pagesAhlgren S - The Sixth, Eighth, Ninth, and Tenth Powers of Ramanujan's Theta Function - Proc. Amer. Math. Soc. 128 (2000) No.5 1333-1338Renee BravoNo ratings yet
- 2014 - OjsDocument14 pages2014 - OjsPaulo MarquesNo ratings yet
- Mathematics: Asymmetric Orlicz Radial BodiesDocument9 pagesMathematics: Asymmetric Orlicz Radial BodiesAhsan HafeezNo ratings yet
- Probability Distributions: D Ds DsDocument10 pagesProbability Distributions: D Ds Dsakt2111No ratings yet
- EE263 Homework Problems Lecture 2 - Linear Functions and ExamplesDocument154 pagesEE263 Homework Problems Lecture 2 - Linear Functions and Examplestinozasable100% (1)
- Perturbación Del Radio Numérico Q de Un Operador de Desplazamiento PonderadoDocument10 pagesPerturbación Del Radio Numérico Q de Un Operador de Desplazamiento PonderadoRolly Cadillo PomaNo ratings yet
- Binomial and Hypergeometric PDFDocument12 pagesBinomial and Hypergeometric PDFnuriyesanNo ratings yet
- Entropy Versus Homology For Certain Diffeomorphisms: (Received June 1973)Document7 pagesEntropy Versus Homology For Certain Diffeomorphisms: (Received June 1973)michel.walz01No ratings yet
- Invariant or Quasi-Invariant Probability Measures For Infinite Dimensional GroupsDocument17 pagesInvariant or Quasi-Invariant Probability Measures For Infinite Dimensional GroupsIgor PavlovNo ratings yet
- Ast Putationofa C A: F Com D Ditive Ell U Lar UtomataDocument6 pagesAst Putationofa C A: F Com D Ditive Ell U Lar UtomataDom DeSiciliaNo ratings yet
- Cai. Z (1996)Document9 pagesCai. Z (1996)KarimaNo ratings yet
- 2018 Iiipaper 103Document4 pages2018 Iiipaper 103natnael denekeNo ratings yet
- Optical TheoremDocument5 pagesOptical TheoremMario PetričevićNo ratings yet
- Appendix PDFDocument6 pagesAppendix PDFAnonymous 2rlcHIpCkwNo ratings yet
- On The Theory of Elliptically Contoured Distributions - Cambanis, Huang, Simons (1981)Document18 pagesOn The Theory of Elliptically Contoured Distributions - Cambanis, Huang, Simons (1981)Emerson ButynNo ratings yet
- Hamiltonian Parity BasicsDocument7 pagesHamiltonian Parity BasicsRose AleNo ratings yet
- Moments of Order Statistics of The Cantor DistributionDocument5 pagesMoments of Order Statistics of The Cantor DistributionYefersonGomezNo ratings yet
- R.hofer M-Point Invariants of Real GeometriesDocument6 pagesR.hofer M-Point Invariants of Real GeometriesEder Raul Huaccachi HuamaniNo ratings yet
- Stat 331 Tutorial SetDocument2 pagesStat 331 Tutorial SetMarcus KusiNo ratings yet
- Ahl GrenDocument9 pagesAhl GrengigiventuzaNo ratings yet
- Asymptotic Behaviour at Infinity of Solutions of Second Kind Integral Equations On Unbounded Regions of RDocument22 pagesAsymptotic Behaviour at Infinity of Solutions of Second Kind Integral Equations On Unbounded Regions of RatpeplowNo ratings yet
- Bruce Characerizing SubspacesDocument6 pagesBruce Characerizing SubspacesniknavinNo ratings yet
- Solutions To Homework ThreeDocument17 pagesSolutions To Homework ThreeamyNo ratings yet
- Homeworkproblems PDFDocument144 pagesHomeworkproblems PDFVictor LimNo ratings yet
- 1950 - Paper - Information Retrieval Viewed As Temporal SignallingDocument12 pages1950 - Paper - Information Retrieval Viewed As Temporal SignallingDerek GreenNo ratings yet
- Weighted Energy Problem On The Unit Sphere: Mykhailo BilogliadovDocument22 pagesWeighted Energy Problem On The Unit Sphere: Mykhailo BilogliadovnicolasNo ratings yet
- CR ExtensionDocument19 pagesCR ExtensionRodrigo MendesNo ratings yet
- Enumerative Combinatorics and Posets: Assignment # 2: Felipe Bedoya May 4, 2020Document10 pagesEnumerative Combinatorics and Posets: Assignment # 2: Felipe Bedoya May 4, 2020FelipeNo ratings yet
- Illinois Journal of Mathematics Volume 50, Number 1, Spring 2006, Pages 67-91 S 0019-2082Document25 pagesIllinois Journal of Mathematics Volume 50, Number 1, Spring 2006, Pages 67-91 S 0019-2082Rafalel JupioNo ratings yet
- Matrix ManipulatonDocument23 pagesMatrix ManipulatonducthienhuaNo ratings yet
- On The Spin Angular Momentum of MesonsDocument12 pagesOn The Spin Angular Momentum of Mesonscaruiz69No ratings yet
- Proof of The (Local) Angular Momemtum-Mass Inequality For Axisymmetric Black HolesDocument14 pagesProof of The (Local) Angular Momemtum-Mass Inequality For Axisymmetric Black HolesavilafabianNo ratings yet
- Weilcourse PDFDocument28 pagesWeilcourse PDFAnshul RavichandarNo ratings yet
- Lecture 6. Order Statistics: 6.1 The Multinomial FormulaDocument19 pagesLecture 6. Order Statistics: 6.1 The Multinomial FormulaLya Ayu PramestiNo ratings yet
- On Halh Integral Weight Jacobi MM BRDocument9 pagesOn Halh Integral Weight Jacobi MM BRVarshini SelvarajanNo ratings yet
- On The Size of The Shafarevich-Tate Group of Elliptic Curves Over Function FieldsDocument13 pagesOn The Size of The Shafarevich-Tate Group of Elliptic Curves Over Function FieldsAna OiNo ratings yet
- A Theorem On Hurwitz SeriesDocument3 pagesA Theorem On Hurwitz Seriesykw kcckcNo ratings yet
- STPM Trial 2009 Matht2 (Smi Ipoh)Document4 pagesSTPM Trial 2009 Matht2 (Smi Ipoh)SimPorNo ratings yet
- Answering Counting Aggregate Queries Over Ontologies of DL-Lite Family (Proofs)Document7 pagesAnswering Counting Aggregate Queries Over Ontologies of DL-Lite Family (Proofs)anonymousaaai2013No ratings yet
- The Cantor Set in Probability Theory: 12A (Lio,!lDocument8 pagesThe Cantor Set in Probability Theory: 12A (Lio,!lSDS adadNo ratings yet
- R - Linear Systems On Toric Varieties - LaterveerDocument8 pagesR - Linear Systems On Toric Varieties - LaterveerUnDueTreSberlaNo ratings yet
- 1.probability Random Variables and Stochastic Processes Athanasios Papoulis S. Unnikrishna Pillai 1 300 181 210Document30 pages1.probability Random Variables and Stochastic Processes Athanasios Papoulis S. Unnikrishna Pillai 1 300 181 210AlvaroNo ratings yet
- Lesson 1. Probability SpacesDocument16 pagesLesson 1. Probability SpacesRobert HardyNo ratings yet
- 4 Shannon's TheoryDocument52 pages4 Shannon's TheoryMichelleNo ratings yet
- Counterexamples On Generalized Metric SpacesDocument4 pagesCounterexamples On Generalized Metric SpacesARYAN SRIVASTAVANo ratings yet
- Foss Lecture4Document12 pagesFoss Lecture4Jarsen21No ratings yet
- Cardinal Inequalities For Topological Spaces Involving The Weak Lindelof NumberDocument10 pagesCardinal Inequalities For Topological Spaces Involving The Weak Lindelof NumberGabriel medinaNo ratings yet
- Ijpam - Eu: RT Q QDocument6 pagesIjpam - Eu: RT Q QMediRahmadNo ratings yet
- Splitting of Some More Spaces: Math. Proc. Camb. Phil. Soc. (1979), 86, 227 2 2 7 Printed in Great BritainDocument10 pagesSplitting of Some More Spaces: Math. Proc. Camb. Phil. Soc. (1979), 86, 227 2 2 7 Printed in Great BritainEpic WinNo ratings yet
- Notes On Discontinuous F (X) Satisfying F (X + Y) F (X) F (Y)Document5 pagesNotes On Discontinuous F (X) Satisfying F (X + Y) F (X) F (Y)cNo ratings yet
- Cycle Structure of Affine Transformations of Vector Spaces Over GF (P)Document5 pagesCycle Structure of Affine Transformations of Vector Spaces Over GF (P)polonium rescentiNo ratings yet
- Statistical Limit Points of Sequences On Intuitionistic Fuzzy Normed SpacesDocument12 pagesStatistical Limit Points of Sequences On Intuitionistic Fuzzy Normed SpacesYiğit ErpakNo ratings yet
- CIS 301: Lecture Notes On InductionDocument8 pagesCIS 301: Lecture Notes On InductionLee Wang HaoNo ratings yet
- AbstractDocument19 pagesAbstractlancejoe2020No ratings yet
- Eur Math137 ProjectSchemesDocument8 pagesEur Math137 ProjectSchemesChris EurNo ratings yet
- Equivalent NormsDocument3 pagesEquivalent NormsMorvaridYiNo ratings yet
- Discrete Random VariableDocument13 pagesDiscrete Random VariableFierda Kurnia CapNo ratings yet
- Stochastic Analysis NotesDocument103 pagesStochastic Analysis NoteschristianblancoNo ratings yet
- Discrete Series of GLn Over a Finite Field. (AM-81), Volume 81From EverandDiscrete Series of GLn Over a Finite Field. (AM-81), Volume 81No ratings yet
- Predictive Uncertainty Estimation in Water Demand Forecasting Using The Model Conditional ProcessorDocument13 pagesPredictive Uncertainty Estimation in Water Demand Forecasting Using The Model Conditional ProcessorKarina HiraNo ratings yet
- Role of A Central Administrator in Managing Water Resources: The Case of The Israeli Water CommissionerDocument12 pagesRole of A Central Administrator in Managing Water Resources: The Case of The Israeli Water CommissionerKarina HiraNo ratings yet
- Impulse Response Function and Wavelet Analysis of Transient Pressure Signals For Leak Detection in PipesDocument7 pagesImpulse Response Function and Wavelet Analysis of Transient Pressure Signals For Leak Detection in PipesKarina HiraNo ratings yet
- Econyl Qualified Protocol v1Document16 pagesEconyl Qualified Protocol v1Karina HiraNo ratings yet
- C Practical Lab FileDocument36 pagesC Practical Lab FileHarsh GuptaNo ratings yet
- WeltyDocument24 pagesWeltyFelipeNo ratings yet
- Useful GRE FormulaeDocument22 pagesUseful GRE Formulaeyogeshshivani6914100% (1)
- Program-Curriculum NewDocument2 pagesProgram-Curriculum NewAngeline InciongNo ratings yet
- Math 10 Quarter 1Document7 pagesMath 10 Quarter 1alfredo s. donio jr.No ratings yet
- SERABOC ACTION RESEARCH - MathDocument6 pagesSERABOC ACTION RESEARCH - MathApril LayawaNo ratings yet
- Gec320 1 PDFDocument21 pagesGec320 1 PDFOyinkansola OsiboduNo ratings yet
- Influence Line DiagramDocument23 pagesInfluence Line Diagramarif_rubinNo ratings yet
- Antiderivative of A FunctionDocument7 pagesAntiderivative of A FunctionAngelie Limbago CagasNo ratings yet
- Multicopter Design Optimization and ValidationDocument13 pagesMulticopter Design Optimization and ValidationTuyen TranNo ratings yet
- 5 Reasoning in Uncertain Situation - v3Document17 pages5 Reasoning in Uncertain Situation - v3Ay SyNo ratings yet
- SAT Math 20min A DayDocument241 pagesSAT Math 20min A DayQuân Dương Minh100% (1)
- DLL Mathematics 6 q2 w3Document7 pagesDLL Mathematics 6 q2 w3Ashley Simon0% (1)
- Adaa - Question BankDocument3 pagesAdaa - Question BankMOHIT RAJPUTNo ratings yet
- Gauss Contest 2002 Solutions: Canadian Mathematics CompetitionDocument10 pagesGauss Contest 2002 Solutions: Canadian Mathematics CompetitionprasadkvssNo ratings yet
- Conditional and Biconditional StatementsDocument16 pagesConditional and Biconditional StatementsNicole Easther GabilangosoNo ratings yet
- Tangent TangentDocument200 pagesTangent TangentJane forteNo ratings yet
- 1 What Is Engineering?Document22 pages1 What Is Engineering?Cedrixe MadridNo ratings yet
- Fraction Shapes1Document2 pagesFraction Shapes1Sulfie HarsNo ratings yet
- 9709 AICE Mathematics Paper 1 Specimen AnswersDocument25 pages9709 AICE Mathematics Paper 1 Specimen AnswersDezzy-RoseNo ratings yet
- 2019 Mock State Competition Target Round Problems 1 & 2: Do Not Begin Until You Are Instructed To Do SoDocument8 pages2019 Mock State Competition Target Round Problems 1 & 2: Do Not Begin Until You Are Instructed To Do SosreedharbharathNo ratings yet
- Engg. Management SyllabusDocument9 pagesEngg. Management SyllabusMariel SibuloNo ratings yet
- Tutorial Problems On Feedback Amplifiers (ECE-2202) : SolutionDocument5 pagesTutorial Problems On Feedback Amplifiers (ECE-2202) : Solutiongebretsadkan abrha100% (2)
- Math Test Item FSC Part 2Document38 pagesMath Test Item FSC Part 2Fakhar AbbasNo ratings yet
- 0607 - w23 - QP - 62-Variant 2Document16 pages0607 - w23 - QP - 62-Variant 2shikhaNo ratings yet
- Unit 2 DualityDocument37 pagesUnit 2 DualityKAMAL PATINo ratings yet
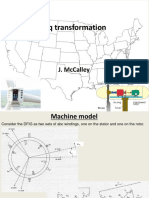
- D-Q Transformation: J. MccalleyDocument51 pagesD-Q Transformation: J. MccalleyRicardo TironeNo ratings yet
- Pre-Test Physics (Questions and Answers) : Calculated by Adding or Subtracting Two Measured ValuesDocument10 pagesPre-Test Physics (Questions and Answers) : Calculated by Adding or Subtracting Two Measured ValuesDaisy GamerNo ratings yet