Download as pdf or txt
You might also like
- Phy 210 Experiment 1 Moment of Inertia and Angular MomentumDocument6 pagesPhy 210 Experiment 1 Moment of Inertia and Angular MomentumAkram AlRompini50% (2)
- GC6-201402-wiring Diagram M - P - K - L PDFDocument280 pagesGC6-201402-wiring Diagram M - P - K - L PDFDany Ruiz67% (3)
- 14 Momentum ImpulseDocument4 pages14 Momentum ImpulseeltytanNo ratings yet
- Cmp200dr DrawingsDocument35 pagesCmp200dr DrawingseduardoNo ratings yet
- IGT Trimline Distribution Board (Backplane) Schematic (758-300-10)Document5 pagesIGT Trimline Distribution Board (Backplane) Schematic (758-300-10)dgb2227100% (1)
- Me 2202 Engineering ThermodynamicsDocument2 pagesMe 2202 Engineering ThermodynamicsDinesh MechNo ratings yet
- JEE Main 2019 Physics April Attempt Shift - 2 (10th April, 2019)Document16 pagesJEE Main 2019 Physics April Attempt Shift - 2 (10th April, 2019)Resonance Eduventures100% (7)
- Unit 14Document17 pagesUnit 14gunaji.sawant33No ratings yet
- Shigley8th FlexMachElements CHPT 17Document4 pagesShigley8th FlexMachElements CHPT 17FebrianAliandiNo ratings yet
- 4 PDFDocument1 page4 PDFaritw541214No ratings yet
- Cmp200dr DrawingsDocument38 pagesCmp200dr DrawingsSwami Meera100% (1)
- 4-CMP200DR DRAWINGS CSH SVC Training 2010 PDFDocument31 pages4-CMP200DR DRAWINGS CSH SVC Training 2010 PDFIzzeldin ZakiNo ratings yet
- Back-Up Light (From Aug. 2015 Production)Document2 pagesBack-Up Light (From Aug. 2015 Production)Hendra AgungNo ratings yet
- CMP 200 DrawingsDocument32 pagesCMP 200 DrawingsJaxon MosfetNo ratings yet
- MT - Aplikasi SPL Pada TrussDocument3 pagesMT - Aplikasi SPL Pada TrussRivan SeptianNo ratings yet
- FFLDocument1 pageFFLDkorniNo ratings yet
- ME321 Kinematics and Dynamics of Machines: Steve Lambert Mechanical Engineering, U of WaterlooDocument12 pagesME321 Kinematics and Dynamics of Machines: Steve Lambert Mechanical Engineering, U of WaterlooMohammed Al-OdatNo ratings yet
- 3.1 - Rectangular ComponentsDocument6 pages3.1 - Rectangular ComponentsabasNo ratings yet
- 05 Plate and Cone ClutchDocument17 pages05 Plate and Cone Clutchahmed albeekNo ratings yet
- Electrical Connections: Section F - TransmissionDocument1 pageElectrical Connections: Section F - TransmissiondenisNo ratings yet
- Structmech: A Tikz Command Set For Structural Mechanics Drawings Theodore ChangDocument10 pagesStructmech: A Tikz Command Set For Structural Mechanics Drawings Theodore ChangMedNo ratings yet
- Training Adjustm. Instr. Frequency Conv. Type D + GDocument24 pagesTraining Adjustm. Instr. Frequency Conv. Type D + GPaulNo ratings yet
- Training Adjustm. Instr. Frequency Conv. Type D + GDocument24 pagesTraining Adjustm. Instr. Frequency Conv. Type D + GPaulNo ratings yet
- 2017 D 2.0 TCI-R D 2.0 TCI-R Schematic Diagrams Engine Electrical System Engine Control System Schematic DiagramsDocument1 page2017 D 2.0 TCI-R D 2.0 TCI-R Schematic Diagrams Engine Electrical System Engine Control System Schematic Diagramslyanna120168No ratings yet
- Giantslayer - 06 - Shadow of The Storm Tyrant - Interactive MapDocument5 pagesGiantslayer - 06 - Shadow of The Storm Tyrant - Interactive MapMarco CampusNo ratings yet
- Camry 2az - Fe 2008Document13 pagesCamry 2az - Fe 2008talangocday100% (1)
- 2018 G 1.0 MPI KAPPA Schematic Diagrams Brake System Electronic Stability Program (ESP) System Schematic DiagramsDocument1 page2018 G 1.0 MPI KAPPA Schematic Diagrams Brake System Electronic Stability Program (ESP) System Schematic DiagramsHuy Trần QuốcNo ratings yet
- Mod-Io - Rev - A1 Olimex LTD, Bulgaria, 2013: Fmax 50KhzDocument1 pageMod-Io - Rev - A1 Olimex LTD, Bulgaria, 2013: Fmax 50KhzHector Estrada ToledoNo ratings yet
- ZF As Tronic Schematic E PDF PDF Transmission (Mechanics) VehiclesDocument1 pageZF As Tronic Schematic E PDF PDF Transmission (Mechanics) Vehiclesariswidi03No ratings yet
- ECT and A/T Indicator, Engine Control ECT and A/T Indicator, Engine ControlDocument12 pagesECT and A/T Indicator, Engine Control ECT and A/T Indicator, Engine ControlIgorIlnickijNo ratings yet
- PlanosDocument1 pagePlanosFranklinNo ratings yet
- Lecture 3 Elements BC Loading Materials UpdatedDocument107 pagesLecture 3 Elements BC Loading Materials UpdatedHaytham AlmaghariNo ratings yet
- Furukawa 1500-EDII - D20II - Engine Starting Circuit X PDFDocument28 pagesFurukawa 1500-EDII - D20II - Engine Starting Circuit X PDFthomaz100% (3)
- Tsuji Equipments Running Hours Pulley (Sheave) 2021Document4 pagesTsuji Equipments Running Hours Pulley (Sheave) 2021Abdul BasitNo ratings yet
- Universal Pipe Cutter (UPC) Replacement Parts BookletDocument12 pagesUniversal Pipe Cutter (UPC) Replacement Parts BookletmarioNo ratings yet
- Modelling The Impact of Wakes On Power Output at Nysted and Horns RevDocument10 pagesModelling The Impact of Wakes On Power Output at Nysted and Horns RevhonyNo ratings yet
- Modeling Triple Friction Pendulum Isolators in Program Sap2000Document55 pagesModeling Triple Friction Pendulum Isolators in Program Sap2000louhibiNo ratings yet
- Mov PDFDocument1 pageMov PDFJefri AnakhiNo ratings yet
- 13.8V 40A Power Supply Schematic PrintsDocument1 page13.8V 40A Power Supply Schematic PrintsRafael FersacaNo ratings yet
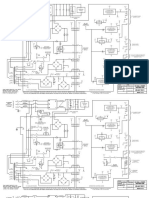
- Electrical Systems: HCR1200-EDIIDocument28 pagesElectrical Systems: HCR1200-EDIIErmias100% (4)
- 42pq30r ManualDocument19 pages42pq30r ManualMohd Basri HashimNo ratings yet
- Oooo': K (IyciyviywixviDocument5 pagesOooo': K (IyciyviywixviJustan MendezNo ratings yet
- 1 7 8 Synchronous Machine Representation in Stability Studies Chap. 5Document70 pages1 7 8 Synchronous Machine Representation in Stability Studies Chap. 5Cristian Illescas AstudilloNo ratings yet
- Engineering Mechanics Unit 1 Review and SummaryDocument4 pagesEngineering Mechanics Unit 1 Review and SummaryharishaerophdNo ratings yet
- American Regions Math League (ARML) - Local Contests - Answers (2019)Document1 pageAmerican Regions Math League (ARML) - Local Contests - Answers (2019)ElevenPlus ParentsNo ratings yet
- American Regions Math League (ARML) - Local Contests - Answers (2019) PDFDocument1 pageAmerican Regions Math League (ARML) - Local Contests - Answers (2019) PDFElevenPlus ParentsNo ratings yet
- Display Controller (Atmel Based)Document4 pagesDisplay Controller (Atmel Based)eduardoNo ratings yet
- LOP Genset TegasDocument6 pagesLOP Genset TegasGOGO COllZZssNo ratings yet
- 2015 Grand Santafe D 2.2 Tci-R-DiagramDocument1 page2015 Grand Santafe D 2.2 Tci-R-Diagrammarcelo ravenaNo ratings yet
- Shape and Size: Mechanical ParametersDocument1 pageShape and Size: Mechanical Parametersslamet riadiNo ratings yet
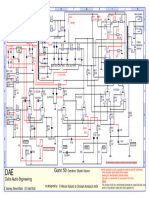
- Gunn 50 NewDocument1 pageGunn 50 Newdimitrius.hNo ratings yet
- Four-Point Bending Test of Determining Stress-StrainDocument4 pagesFour-Point Bending Test of Determining Stress-StrainyasminaNo ratings yet
- Esquema Samsung PN43H4000Document7 pagesEsquema Samsung PN43H4000Rosselino DE Jesus MonteiroNo ratings yet
- Fog LightDocument1 pageFog Lighttuan anh nguyễnNo ratings yet
- C79000g7476c154-05en dr22Document266 pagesC79000g7476c154-05en dr22julianlock832No ratings yet
- Esquema Volante SSP - 235 - d2Document1 pageEsquema Volante SSP - 235 - d2Carlota SilvaNo ratings yet
- Error Codes Updated 2023Document282 pagesError Codes Updated 2023R. BaluNo ratings yet
- Lecture 9 - Spur Gear DesignDocument11 pagesLecture 9 - Spur Gear DesignSamawat AhsanNo ratings yet
- Lec 5.1+5.2Document5 pagesLec 5.1+5.2Samawat AhsanNo ratings yet
- Modeling of Dynamic Response: Automatic Control Engineering MCE 4663Document1 pageModeling of Dynamic Response: Automatic Control Engineering MCE 4663Samawat AhsanNo ratings yet
- Example 3-12: SolutionDocument12 pagesExample 3-12: SolutionSamawat AhsanNo ratings yet
- Flange: Machine DesignDocument5 pagesFlange: Machine DesignSamawat AhsanNo ratings yet
- F W v g c F: = = = = = η δ 1 0 98 9 81 0 00006 1 285 9 m s m s m N N - . .Document5 pagesF W v g c F: = = = = = η δ 1 0 98 9 81 0 00006 1 285 9 m s m s m N N - . .Samawat AhsanNo ratings yet
- 4-3 Deflection Due To Bending: 164 Mechanical Engineering DesignDocument10 pages4-3 Deflection Due To Bending: 164 Mechanical Engineering DesignSamawat AhsanNo ratings yet
- Lec 3.1Document10 pagesLec 3.1Samawat AhsanNo ratings yet
- Answer: Failures Resulting From Static Loading 241Document12 pagesAnswer: Failures Resulting From Static Loading 241Samawat AhsanNo ratings yet
- Equations of EquilibriumDocument18 pagesEquations of EquilibriumSamawat AhsanNo ratings yet
- Worksheet 03 03Document3 pagesWorksheet 03 03BadeekhNo ratings yet
- Rahman 2016 (Basear)Document5 pagesRahman 2016 (Basear)annekarolinemp041193No ratings yet
- Pull Apart BasinDocument13 pagesPull Apart BasinSherri KhanNo ratings yet
- Aerodynamics AshishDocument10 pagesAerodynamics AshishaerorockNo ratings yet
- CVL-243 Reinforced Concrete Design Semester 1, 2020-21: Sahil Bansal, IIT Delhi 1Document23 pagesCVL-243 Reinforced Concrete Design Semester 1, 2020-21: Sahil Bansal, IIT Delhi 1Ekant YadavNo ratings yet
- NotesDocument92 pagesNotesChrise RajNo ratings yet
- Lab ManuelDocument79 pagesLab ManuelMarty SmurdaNo ratings yet
- Term Project - Pinball MachineDocument22 pagesTerm Project - Pinball Machineapi-311898795No ratings yet
- Makalah AVOER 9 - Zainal Abidin Dan GustiniDocument9 pagesMakalah AVOER 9 - Zainal Abidin Dan GustiniOzora RexyNo ratings yet
- Name: Algie P. Ejorango Class Schedule: Friday (9:00-12:00 PM)Document4 pagesName: Algie P. Ejorango Class Schedule: Friday (9:00-12:00 PM)Jan Jan MoralesNo ratings yet
- JEST Question Paper 2016Document12 pagesJEST Question Paper 2016Jay BhambureNo ratings yet
- Extrusion Process and Die Design ConsiderationDocument62 pagesExtrusion Process and Die Design ConsiderationMun JiwonNo ratings yet
- Canada Russia and EuphoDocument1,043 pagesCanada Russia and EuphonithinjothimuruganNo ratings yet
- IGCSE Coordinated Science Review Notes-Physics PDFDocument95 pagesIGCSE Coordinated Science Review Notes-Physics PDFNishi ShahNo ratings yet
- Special Relativity HomeworkDocument1 pageSpecial Relativity HomeworkMuhammad SayebNo ratings yet
- Lecture3 PDFDocument3 pagesLecture3 PDFKumar RajeshNo ratings yet
- Flow Through Piping Network: Objectives of The ExperimentDocument4 pagesFlow Through Piping Network: Objectives of The Experimenttesfa negaNo ratings yet
- Compressor Piping SystemDocument11 pagesCompressor Piping Systemmusaveer100% (1)
- Heat Transfer Calculations Evaporator #1 Evaporator #2Document6 pagesHeat Transfer Calculations Evaporator #1 Evaporator #2Joshua JohnsonNo ratings yet
- Physics Laboratory ApparatusesDocument7 pagesPhysics Laboratory ApparatusesZini Rodil100% (2)
- Manufacturing Technology (ME361) - Lecture 3: Shantanu BhattacharyaDocument20 pagesManufacturing Technology (ME361) - Lecture 3: Shantanu BhattacharyaSahil SundaNo ratings yet
- BoefDocument6 pagesBoefmetroroadNo ratings yet
- AEroelasticityDocument61 pagesAEroelasticityKashif AyazNo ratings yet
- ThicknessDocument53 pagesThicknessRajul MuraliNo ratings yet
- Elasticity, Sterss and StrainDocument19 pagesElasticity, Sterss and StrainKhairunnisa PutryNo ratings yet