Download as pdf or txt
You might also like
- IIMC Consulting Casebook 2022-23Document147 pagesIIMC Consulting Casebook 2022-23Aarti Kumari100% (2)
- Grs 900rDocument11 pagesGrs 900rslipsittin92% (13)
- Symbolism in Exhibitional Architecture - Philosophy of Space (By: Adonis El Hussein)Document104 pagesSymbolism in Exhibitional Architecture - Philosophy of Space (By: Adonis El Hussein)Адонис Ель ХуссеинNo ratings yet
- Mathematic Modelling of Dynamic SYSTEMS Ch. 2Document31 pagesMathematic Modelling of Dynamic SYSTEMS Ch. 2Irtiza IshrakNo ratings yet
- Lect Note 1 IntroDocument28 pagesLect Note 1 IntroJie RongNo ratings yet
- Chapter 4Document39 pagesChapter 4Joseph IbrahimNo ratings yet
- Lecture 2Document47 pagesLecture 2Houssam moussaNo ratings yet
- Automatic Control ExercisesDocument183 pagesAutomatic Control ExercisesFrancesco Vasturzo100% (1)
- Automatic Control III Homework Assignment 3 2015Document4 pagesAutomatic Control III Homework Assignment 3 2015salimNo ratings yet
- ELG4152L305Document33 pagesELG4152L305Rahul GalaNo ratings yet
- Ejercicios de LaplaceDocument3 pagesEjercicios de LaplaceJohn Erick Quiroga GonzalezNo ratings yet
- Linear Systems: Prof Sung-Ho HurDocument30 pagesLinear Systems: Prof Sung-Ho HurYousef BilbeisiNo ratings yet
- Control Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Document184 pagesControl Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Adel AdenaneNo ratings yet
- Introduction To Control Systems Analysis 1. The Transfer Function 1.1Document7 pagesIntroduction To Control Systems Analysis 1. The Transfer Function 1.1prica_adrianNo ratings yet
- Chapter 4 Controllability and ObservabilityDocument24 pagesChapter 4 Controllability and ObservabilityYucheng XiangNo ratings yet
- Discrete Time Control Systems Unit 5Document23 pagesDiscrete Time Control Systems Unit 5kishan guptaNo ratings yet
- Suggested Solution To Past Papers PDFDocument20 pagesSuggested Solution To Past Papers PDFMgla AngelNo ratings yet
- Review 1Document30 pagesReview 1mohammed dowNo ratings yet
- EE 312 Lecture 1Document12 pagesEE 312 Lecture 1دكتور كونوهاNo ratings yet
- Signals and Systems Using Matlab Chapter 6 - Application of Laplace Analysis To ControlDocument22 pagesSignals and Systems Using Matlab Chapter 6 - Application of Laplace Analysis To ControlDiluNo ratings yet
- Chapter 1. Introduction To Con-Trol Systems: State Space EquationsDocument2 pagesChapter 1. Introduction To Con-Trol Systems: State Space EquationsHiếu TrungNo ratings yet
- Chapter 1. Introduction To Con-Trol Systems: State Space EquationsDocument2 pagesChapter 1. Introduction To Con-Trol Systems: State Space EquationsHiếu TrungNo ratings yet
- Ps 9Document3 pagesPs 9Red Russian47No ratings yet
- Output-Feedback Stabilization of Stochastic Nonlinear Systems Driven by Noise of Unknown CovarianceDocument10 pagesOutput-Feedback Stabilization of Stochastic Nonlinear Systems Driven by Noise of Unknown CovarianceEva KaslikNo ratings yet
- Practice Questions For Quiz 1Document2 pagesPractice Questions For Quiz 1Steven BrowneNo ratings yet
- Linear Systems Final Exam Formula SheetDocument4 pagesLinear Systems Final Exam Formula SheetmrdantownsendNo ratings yet
- State Space ExamplesDocument9 pagesState Space ExamplesLumi_Kahlout_4652No ratings yet
- Some Past Exam Problems in Control Systems - Part 1Document5 pagesSome Past Exam Problems in Control Systems - Part 1vigneshNo ratings yet
- Department of Electromechanical Engineering Course Title: Control SystemDocument25 pagesDepartment of Electromechanical Engineering Course Title: Control SystemYidersal MarewNo ratings yet
- Lecture Notes 3:: Transfer Functions, Poles and ZerosDocument7 pagesLecture Notes 3:: Transfer Functions, Poles and ZerosPreetham SaigalNo ratings yet
- Experiment E. Liquid Level Control Using Coupled TanksDocument29 pagesExperiment E. Liquid Level Control Using Coupled Tanks파랑No ratings yet
- Control Systems-2011: Group Home PageDocument15 pagesControl Systems-2011: Group Home Pagemeenachintan3438No ratings yet
- Linear State FeedbackDocument3 pagesLinear State FeedbackRehman SaleemNo ratings yet
- Tutorial 1-Chapter 1Document2 pagesTutorial 1-Chapter 1cantik cuteNo ratings yet
- rr322204 Digital and Optimal Control SystemsDocument8 pagesrr322204 Digital and Optimal Control SystemsSRINIVASA RAO GANTANo ratings yet
- Ee263 Ps1 SolDocument11 pagesEe263 Ps1 SolMorokot AngelaNo ratings yet
- 2019 Answers PDFDocument56 pages2019 Answers PDFNitya Pooja ReddyNo ratings yet
- Assignment 1Document3 pagesAssignment 1vysrilekhaNo ratings yet
- 5 - Handout 131Document3 pages5 - Handout 131athenalavegaNo ratings yet
- ExsamlDocument58 pagesExsamlAsanga JayawardanaNo ratings yet
- AST Exam 2021 03 19Document9 pagesAST Exam 2021 03 19Rehman SaleemNo ratings yet
- Mathematical Madeling and Block DiagramaaDocument93 pagesMathematical Madeling and Block Diagramaaabdul.azeezNo ratings yet
- GATE ME 1991 Question PaperDocument13 pagesGATE ME 1991 Question PaperFlyNarutoFly27No ratings yet
- Adaptive Control Design and AnalysisDocument45 pagesAdaptive Control Design and Analysishind90No ratings yet
- ĐỀ CƯƠNG ÔN TẬP PHẦN LÝ THUYẾT LTĐKTĐ - 2023-2024 - EN - Final - UploadDocument13 pagesĐỀ CƯƠNG ÔN TẬP PHẦN LÝ THUYẾT LTĐKTĐ - 2023-2024 - EN - Final - UploadThịnh Nguyễn QuốcNo ratings yet
- SFWR ENG 4A03 Lab 1: Introduction To Labview and Review of Continuous Control SystemsDocument4 pagesSFWR ENG 4A03 Lab 1: Introduction To Labview and Review of Continuous Control Systemskaruneee7003No ratings yet
- SPC318: System Modeling and Linear SystemsDocument43 pagesSPC318: System Modeling and Linear SystemsAtanuMajiNo ratings yet
- HET312 NotesDocument41 pagesHET312 NotesTing SamuelNo ratings yet
- Control System 2014 Midterm Exam. 1 (2 Pages, 38 Points in Total)Document7 pagesControl System 2014 Midterm Exam. 1 (2 Pages, 38 Points in Total)horace2005No ratings yet
- 2011-05 Sisomimo Design ExamplesDocument14 pages2011-05 Sisomimo Design ExamplesArundhati ChaudhariNo ratings yet
- Robust Discrete-Time Chattering Free Sliding Mode Control: Goran Golo, Cedomir MilosavljevicDocument10 pagesRobust Discrete-Time Chattering Free Sliding Mode Control: Goran Golo, Cedomir MilosavljevicdhineshpNo ratings yet
- Statevariable PDFDocument50 pagesStatevariable PDFMohana UMNo ratings yet
- Indian Institute of Technology Roorkee Department of Electronics & Computer Engineering Signals & Systems (ECN 203) Tutorial Sheet No: 5Document2 pagesIndian Institute of Technology Roorkee Department of Electronics & Computer Engineering Signals & Systems (ECN 203) Tutorial Sheet No: 5Black ReaperNo ratings yet
- Transfer FunctionDocument16 pagesTransfer FunctionAnonymous 0zrCNQNo ratings yet
- Control Systems Assignment-1Document6 pagesControl Systems Assignment-1catdogsunmoon12No ratings yet
- Modeling in The Frequency Domain: Prof. Ju-Jang LeeDocument32 pagesModeling in The Frequency Domain: Prof. Ju-Jang LeeMohammad HassanNo ratings yet
- Considerations On Finite and Fixed Time ConvergenceDocument4 pagesConsiderations On Finite and Fixed Time ConvergenceAntonio EstradaNo ratings yet
- Transfer Function - by AnalogyDocument22 pagesTransfer Function - by AnalogyMohd Ridzuan AhmadNo ratings yet
- Assignment of Signals and SystemDocument3 pagesAssignment of Signals and SystemNitish Kumar YadavNo ratings yet
- Feedback Linearization Continued: Consider The Control Affine SISO SystemDocument23 pagesFeedback Linearization Continued: Consider The Control Affine SISO SystemJason ChiangNo ratings yet
- Thuật Toán Điều Khiển1Document23 pagesThuật Toán Điều Khiển1Văn Nghĩa NguyễnNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Envision Math 3th GR Topic 5Document28 pagesEnvision Math 3th GR Topic 5Anna K. RiveraNo ratings yet
- Nage Waza (Throwing) : HIP THROWS (Koshi Waza)Document5 pagesNage Waza (Throwing) : HIP THROWS (Koshi Waza)Stuart WalshNo ratings yet
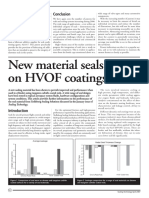
- New Material Seals Better On HVOF CoatingsDocument2 pagesNew Material Seals Better On HVOF Coatingssandbad2100% (2)
- UVGI PresentationDocument124 pagesUVGI PresentationVasanth KumarNo ratings yet
- Zero Gravity Chairs - ErgoQuest Zero Gravity Chairs and WorkstationsDocument6 pagesZero Gravity Chairs - ErgoQuest Zero Gravity Chairs and Workstationsnitouch3564No ratings yet
- Flow Simulation Report Square Nozzle 3-1 InchDocument18 pagesFlow Simulation Report Square Nozzle 3-1 InchVianAlwiNo ratings yet
- Cost CurvesDocument2 pagesCost CurvesSumit Ray100% (1)
- PDF Mechanical Circulatory Support Principles and Applications 2Nd Edition David L Joyce MD Ebook Full ChapterDocument53 pagesPDF Mechanical Circulatory Support Principles and Applications 2Nd Edition David L Joyce MD Ebook Full Chapterglen.webb399100% (5)
- Blazevideo HDTV Player V6.0R User'S ManualDocument17 pagesBlazevideo HDTV Player V6.0R User'S ManualGianfranco CruzattiNo ratings yet
- Very-Low-Speed Variable-Structure Control of Sensor Less Axial Flux Permanent Magnet Synchronous Motor Using An Advanced Rotor Flux ConceptDocument9 pagesVery-Low-Speed Variable-Structure Control of Sensor Less Axial Flux Permanent Magnet Synchronous Motor Using An Advanced Rotor Flux ConceptDEBARATI DAMNo ratings yet
- Bsm6000 Ug Part II-hDocument0 pagesBsm6000 Ug Part II-hMiguel Ángel Escobar FloresNo ratings yet
- Suld United PPT2020.09Document31 pagesSuld United PPT2020.09Ulstuguldur Kh.No ratings yet
- The Hamburger Ate Boy Isn't Acceptable (Odd) But The Boy Ate The Hamburger Is Hamburger Doesn't Have This Property and The Noun Boy DoesDocument6 pagesThe Hamburger Ate Boy Isn't Acceptable (Odd) But The Boy Ate The Hamburger Is Hamburger Doesn't Have This Property and The Noun Boy DoesDania SaviraNo ratings yet
- Bodie Investments 12e IM CH27Document3 pagesBodie Investments 12e IM CH27lexon_kbNo ratings yet
- Nickel Alloy Inconel 718 Properties and Applications by United Performance MetalsDocument4 pagesNickel Alloy Inconel 718 Properties and Applications by United Performance MetalsShubham SharmaNo ratings yet
- DT 900 Pro X: FeaturesDocument1 pageDT 900 Pro X: FeaturestristonNo ratings yet
- Floor 76: Sword Art Online: Infinity Moment - Guide (Uncompleted)Document30 pagesFloor 76: Sword Art Online: Infinity Moment - Guide (Uncompleted)Sony Kasujaya100% (1)
- Egg Drop NotesDocument2 pagesEgg Drop Notesapi-365288705No ratings yet
- 2020 79th PNWIMC Annual Conference AnnouncementDocument2 pages2020 79th PNWIMC Annual Conference AnnouncementnwberryfoundationNo ratings yet
- Sweet Corn and Cheese Samoosa - Google SearchDocument2 pagesSweet Corn and Cheese Samoosa - Google SearchmisslxmasherNo ratings yet
- Feb 3 Questions Nuclear WasteDocument4 pagesFeb 3 Questions Nuclear WastedcudfhiudfiuNo ratings yet
- Why Use Preheat and Post Weld Heat Treatments Brochure PDFDocument2 pagesWhy Use Preheat and Post Weld Heat Treatments Brochure PDFErick HoganNo ratings yet
- Numerical Analysis of A Bisection-Exclusion Method To Find Zeros of Univariate Analytic FunctionsDocument39 pagesNumerical Analysis of A Bisection-Exclusion Method To Find Zeros of Univariate Analytic FunctionsLucas SantosNo ratings yet
- 4G Wireless PresentationDocument26 pages4G Wireless PresentationArjun ShankaNo ratings yet
- Nasogastric Tube FeedingDocument3 pagesNasogastric Tube FeedingRhenelyn Delos ReyesNo ratings yet
- Book's SolutionsDocument20 pagesBook's SolutionsKodjo ALIPUINo ratings yet
- El Volcan MombachoDocument10 pagesEl Volcan MombachoYossuara PittiNo ratings yet