Download as pdf or txt
You might also like
- The Mixing Process PVCDocument4 pagesThe Mixing Process PVCb1gm3n86% (7)
- Case1 SolutionDocument15 pagesCase1 SolutionRoy Sarkis100% (1)
- Mcv4u CH 1 Nelson SolutionsDocument76 pagesMcv4u CH 1 Nelson SolutionsStephanie100% (1)
- Real Options and Financial Structuring - Case Study 3 Merck and CompanyDocument3 pagesReal Options and Financial Structuring - Case Study 3 Merck and CompanyRoy Sarkis100% (1)
- Optimization Methods (MFE) : Elena PerazziDocument28 pagesOptimization Methods (MFE) : Elena Perazziddd huangNo ratings yet
- Ps and Solution CS229Document55 pagesPs and Solution CS229Anonymous COa5DYzJwNo ratings yet
- Optimization Methods (MFE) : Elena PerazziDocument28 pagesOptimization Methods (MFE) : Elena Perazziddd huangNo ratings yet
- Constrained OptimizationDocument23 pagesConstrained Optimizationlucky250No ratings yet
- Convex Optimization Overview (CNT'D) : 1 RecapDocument15 pagesConvex Optimization Overview (CNT'D) : 1 RecapGeorge SakrNo ratings yet
- Optimization Methods (MFE) : Elena PerazziDocument31 pagesOptimization Methods (MFE) : Elena PerazziRoy Sarkis100% (1)
- Bryan and Shibberu - PeBryan and Shibberu - Penalty Functions and Constrained Optimizationnalty Functions and Constrained OptimizationDocument6 pagesBryan and Shibberu - PeBryan and Shibberu - Penalty Functions and Constrained Optimizationnalty Functions and Constrained OptimizationjmelocNo ratings yet
- 17.1 Uncertainty Sampling: t+1 X X 2 TDocument7 pages17.1 Uncertainty Sampling: t+1 X X 2 TcecoppolaNo ratings yet
- Session 03Document6 pagesSession 03Just SomebodyNo ratings yet
- ACT6100 A2020 Sup 12Document37 pagesACT6100 A2020 Sup 12lebesguesNo ratings yet
- 0603147Document7 pages0603147Akshat NegiNo ratings yet
- Lectures 1Document98 pagesLectures 1Shy RonnieNo ratings yet
- MATH3161 Lecture 1Document7 pagesMATH3161 Lecture 1BobNo ratings yet
- COMP 3250 B - Design and Analysis of Algorithms (Advanced Class)Document2 pagesCOMP 3250 B - Design and Analysis of Algorithms (Advanced Class)Z GooNo ratings yet
- Lecture3-4 - Arghya - Week 2Document29 pagesLecture3-4 - Arghya - Week 2rohit kumarNo ratings yet
- I. Introduction To Convex OptimizationDocument12 pagesI. Introduction To Convex OptimizationAZEENNo ratings yet
- Constrained Optimization: Class Notes On: Mathematical Foundations in Engineering, ECEG 6209Document19 pagesConstrained Optimization: Class Notes On: Mathematical Foundations in Engineering, ECEG 6209Yonas D. Ebren100% (1)
- I. Introduction To Convex Optimization: Georgia Tech ECE 8823a Notes by J. Romberg. Last Updated 13:32, January 11, 2017Document20 pagesI. Introduction To Convex Optimization: Georgia Tech ECE 8823a Notes by J. Romberg. Last Updated 13:32, January 11, 2017zeldaikNo ratings yet
- Algorithms For Constrained OptimizationDocument22 pagesAlgorithms For Constrained OptimizationnmooseNo ratings yet
- Numerical Optimization: Unit 9: Penalty Method and Interior Point Method Unit 10: Filter Method and The Maratos EffectDocument24 pagesNumerical Optimization: Unit 9: Penalty Method and Interior Point Method Unit 10: Filter Method and The Maratos EffectkahvumidragaispeciNo ratings yet
- TOP An Approach To Characterizing Esolution Sets of Convex ProgramsDocument21 pagesTOP An Approach To Characterizing Esolution Sets of Convex ProgramsFumths AeNo ratings yet
- Lecture 8: Strong Duality: 8.1.1 Primal and Dual ProblemsDocument9 pagesLecture 8: Strong Duality: 8.1.1 Primal and Dual ProblemsCristian Núñez ClausenNo ratings yet
- The Methods of Solution For Constrained Nonlinear ProgrammingDocument6 pagesThe Methods of Solution For Constrained Nonlinear ProgramminginventyNo ratings yet
- Facts and Formulas 2aDocument9 pagesFacts and Formulas 2aamc994No ratings yet
- Optimization Methods (MFE) : Elena PerazziDocument29 pagesOptimization Methods (MFE) : Elena PerazziRoy SarkisNo ratings yet
- MATH3161 UnswDocument30 pagesMATH3161 UnswMaria DeeTee NguyenNo ratings yet
- Convex Optimization and System Theory: Kees Roos/A.A. Stoorvogel E-Mail: UrlDocument39 pagesConvex Optimization and System Theory: Kees Roos/A.A. Stoorvogel E-Mail: UrlAnonymous N3LpAXNo ratings yet
- Bilevel Programming - A Survey: Dempe@math - Tu-Freiberg - deDocument25 pagesBilevel Programming - A Survey: Dempe@math - Tu-Freiberg - deAndika AsmarandanaNo ratings yet
- ECEG-6311 Power System Optimization and AIDocument22 pagesECEG-6311 Power System Optimization and AIFitsum HaileNo ratings yet
- Discrete Mathematics Sec 3.1-3.8Document6 pagesDiscrete Mathematics Sec 3.1-3.8Muhammad AdilNo ratings yet
- 2 Linear TransformationsDocument32 pages2 Linear TransformationsShanNo ratings yet
- Equality Constrained Optimization: Daniel P. RobinsonDocument33 pagesEquality Constrained Optimization: Daniel P. RobinsonJosue CofeeNo ratings yet
- Opt 2009-12-14 TLDocument14 pagesOpt 2009-12-14 TLAbdesselem BoulkrouneNo ratings yet
- Numerical Analysis: MTL851: Dr. Mani MehraDocument32 pagesNumerical Analysis: MTL851: Dr. Mani MehraPragya DhakarNo ratings yet
- Optimization ProblemsDocument38 pagesOptimization ProblemsMahmoud AbdelazizNo ratings yet
- Penalty MethodsDocument5 pagesPenalty MethodsAli AhmaidNo ratings yet
- LP Methods.S4 Interior Point MethodsDocument17 pagesLP Methods.S4 Interior Point MethodsnkapreNo ratings yet
- Bayes Optimization For Machine LearningDocument29 pagesBayes Optimization For Machine LearningM Rameez Ur RehmanNo ratings yet
- Essential Calculus, James Stewart: Techniques of IntegrationDocument36 pagesEssential Calculus, James Stewart: Techniques of IntegrationChuc NguyenNo ratings yet
- OQM Lecture Note - Part 1 Introduction To Mathematical OptimisationDocument10 pagesOQM Lecture Note - Part 1 Introduction To Mathematical OptimisationdanNo ratings yet
- Micromof2015 151224080824Document310 pagesMicromof2015 151224080824MarksNo ratings yet
- Problem 1Document4 pagesProblem 1Jose CossichNo ratings yet
- AssigmentsDocument12 pagesAssigmentsShakuntala Khamesra100% (1)
- Nonlinear OptimizationDocument6 pagesNonlinear OptimizationKibria PrangonNo ratings yet
- Osculating Parabola and Numerical ExperimentsDocument16 pagesOsculating Parabola and Numerical ExperimentsKolynNo ratings yet
- Maximum Entropy DistributionDocument11 pagesMaximum Entropy DistributionsurvinderpalNo ratings yet
- Lion 5 PaperDocument15 pagesLion 5 Papermilp2No ratings yet
- Penalty and BarrierDocument12 pagesPenalty and BarrierBurak YükselNo ratings yet
- AM12 Optimization 2 HandoutDocument27 pagesAM12 Optimization 2 Handout张舒No ratings yet
- Part A: Texas A&M University MEEN 683 Multidisciplinary System Design Optimization (MSADO) Spring 2021 Assignment 2Document5 pagesPart A: Texas A&M University MEEN 683 Multidisciplinary System Design Optimization (MSADO) Spring 2021 Assignment 2BobaNo ratings yet
- Numerical Algebra, Control and Optimization Volume 6, Number 2, June 2016Document13 pagesNumerical Algebra, Control and Optimization Volume 6, Number 2, June 2016ادريس عطيه النيانNo ratings yet
- School of Mathematics, Thapar University, PatialaDocument2 pagesSchool of Mathematics, Thapar University, PatialaAdityaNo ratings yet
- Langrangian Function For Economic Load DispatchDocument4 pagesLangrangian Function For Economic Load Dispatchvatsalshah24No ratings yet
- Maxima and Minima - GATE Study Material in PDFDocument7 pagesMaxima and Minima - GATE Study Material in PDFSupriya SantreNo ratings yet
- Numerical Methods For Solving Nonlinear Equations1Document7 pagesNumerical Methods For Solving Nonlinear Equations1Reza MohammadianNo ratings yet
- Math 53 LE 3 Reviewer ProblemsDocument14 pagesMath 53 LE 3 Reviewer ProblemsJc QuintosNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Optimization Methods (MFE) : Elena PerazziDocument28 pagesOptimization Methods (MFE) : Elena PerazziRoy SarkisNo ratings yet
- Optimization Methods (MFE) : Elena PerazziDocument28 pagesOptimization Methods (MFE) : Elena PerazziRoy SarkisNo ratings yet
- Optimization Methods (MFE) : Elena PerazziDocument31 pagesOptimization Methods (MFE) : Elena PerazziRoy Sarkis100% (1)
- Optimization Methods (MFE) : Elena PerazziDocument29 pagesOptimization Methods (MFE) : Elena PerazziRoy SarkisNo ratings yet
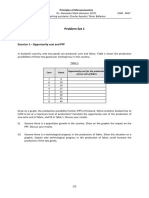
- Problem Set 1: Exercise 1 - Opportunity Cost and PPFDocument2 pagesProblem Set 1: Exercise 1 - Opportunity Cost and PPFRoy SarkisNo ratings yet
- Fin404 Derivatives: Master in Financial Engineering Spring 2019Document7 pagesFin404 Derivatives: Master in Financial Engineering Spring 2019Roy SarkisNo ratings yet
- Real Options and Financial Structuring - Case Study 2 Corning: Convertible Preferred StockDocument6 pagesReal Options and Financial Structuring - Case Study 2 Corning: Convertible Preferred StockRoy SarkisNo ratings yet
- Finance 2 TiUDocument17 pagesFinance 2 TiURoy SarkisNo ratings yet
- Layer Coefficient Determination Using The MEPDG (Pavement-ME)Document19 pagesLayer Coefficient Determination Using The MEPDG (Pavement-ME)Roy SarkisNo ratings yet
- I.! Logic (4,600 PTS) : Question 1 (600 Points) : Guess The Missing TileDocument5 pagesI.! Logic (4,600 PTS) : Question 1 (600 Points) : Guess The Missing TileRoy SarkisNo ratings yet
- Solid Waste Management in Lebanon Introduction Assignmnt 1Document13 pagesSolid Waste Management in Lebanon Introduction Assignmnt 1Roy SarkisNo ratings yet
- Activity 3Document3 pagesActivity 3Roy SarkisNo ratings yet
- Logic (5,100) : Question 1 (600 Points) : in 1970, Nada Is 35 Years Old. in 1975, Nada Is Now 30 Years OldDocument5 pagesLogic (5,100) : Question 1 (600 Points) : in 1970, Nada Is 35 Years Old. in 1975, Nada Is Now 30 Years OldRoy SarkisNo ratings yet
- Assignment 3 11-5-23Document3 pagesAssignment 3 11-5-23Haider khan100% (2)
- Standards and Competency of 5 Years Old ChildrenDocument14 pagesStandards and Competency of 5 Years Old ChildrenFrancis kevin Parre�oNo ratings yet
- Redis Cluster Specification-12Document1 pageRedis Cluster Specification-12Kajaruban SurendranNo ratings yet
- Cabinet MedicalDocument5 pagesCabinet MedicalDavid BarikaNo ratings yet
- ParaViewManual v4 2Document433 pagesParaViewManual v4 2b dNo ratings yet
- Practice Test 26 A. Listening Section 1 Section One - Questions 1-12Document13 pagesPractice Test 26 A. Listening Section 1 Section One - Questions 1-12minhanh nguyễnNo ratings yet
- Axc F XT ML 1000: Axioline F, Left-Alignable Machine Learning Module (Extension Module)Document11 pagesAxc F XT ML 1000: Axioline F, Left-Alignable Machine Learning Module (Extension Module)irhoNo ratings yet
- LEX1 Data SheetDocument2 pagesLEX1 Data Sheetpreetharajamma6025No ratings yet
- Chapter 2 Vectors and Two Dim Motion - Gen - Med - All SectionsDocument60 pagesChapter 2 Vectors and Two Dim Motion - Gen - Med - All Sectionsnader siamNo ratings yet
- Conceptual FrameworkDocument20 pagesConceptual FrameworkWZ HakimNo ratings yet
- Stable ResonatorDocument4 pagesStable ResonatorIjaz TalibNo ratings yet
- National Security PolicyDocument10 pagesNational Security PolicySagar SantwaniNo ratings yet
- CertificateDocument5 pagesCertificateRavi JoshiNo ratings yet
- School Improvement Through Better Grading PracticesDocument5 pagesSchool Improvement Through Better Grading PracticesMortega, John RodolfNo ratings yet
- Tamil FinalDocument9 pagesTamil FinalVidyuth ThyagarajanNo ratings yet
- Module One Wellness PlanDocument10 pagesModule One Wellness PlanMatthew JohnsonNo ratings yet
- El Asombroso Razonamiento de Los Niños, Jorge Salgado S.Document13 pagesEl Asombroso Razonamiento de Los Niños, Jorge Salgado S.Paula CamposNo ratings yet
- Absurdity Incongruity and LaughterDocument24 pagesAbsurdity Incongruity and LaughterMHardt1No ratings yet
- How A Handful of Tech Companies Control Billions of Minds Every DayDocument2 pagesHow A Handful of Tech Companies Control Billions of Minds Every DayMarianna AleynikovaNo ratings yet
- Elective 1 Chapter 6 Lesson 1Document15 pagesElective 1 Chapter 6 Lesson 1Naughty or NiceNo ratings yet
- RGB LedDocument6 pagesRGB LedEder GómezNo ratings yet
- Dwnload Full Practical Research Planning and Design 11th Edition Leedy Test Bank PDFDocument35 pagesDwnload Full Practical Research Planning and Design 11th Edition Leedy Test Bank PDFtrepangenallagevx3co0100% (14)
- Stresses in SoilDocument37 pagesStresses in SoilRadhaAnanthalekshmiNo ratings yet
- BARC India Guidelines For Single Event Reporting (Amended) - August 2018Document21 pagesBARC India Guidelines For Single Event Reporting (Amended) - August 2018Harsh2588No ratings yet
- ME2203 Subject Notes PDFDocument34 pagesME2203 Subject Notes PDFRakeshkumarceg100% (1)
- IMG Xios XG Supreme USB Operating InstructionsDocument80 pagesIMG Xios XG Supreme USB Operating InstructionsClarity DentalNo ratings yet
- How To Develop Mathematical Skills - 2D-3D Lotto CardsDocument2 pagesHow To Develop Mathematical Skills - 2D-3D Lotto CardsIsabel ValenteNo ratings yet
- LG 32lh35fd AaDocument66 pagesLG 32lh35fd AaJúlio CésarNo ratings yet