Download as pdf or txt
You might also like
- Sampled Values Configuration ExampleDocument14 pagesSampled Values Configuration ExampleVishwanath Todurkar100% (1)
- EE4314Lab 2 Fall2013Document7 pagesEE4314Lab 2 Fall2013Edú CárdenasNo ratings yet
- Figure 13: Block Diagram Representing The Two Way Communication Between The EV and The Smart Grid ServerDocument1 pageFigure 13: Block Diagram Representing The Two Way Communication Between The EV and The Smart Grid ServerRaghu RamanNo ratings yet
- Establishment of A Two Way Communication System Using ZigbeeDocument1 pageEstablishment of A Two Way Communication System Using ZigbeeRaghu RamanNo ratings yet
- Group 15 Proj 14 Prashant Jay ChinmayDocument5 pagesGroup 15 Proj 14 Prashant Jay ChinmayPrashant ShettigarNo ratings yet
- PLCDocument2 pagesPLCDarshan VoraNo ratings yet
- SJTU Report SW GIFT-COFB AADocument24 pagesSJTU Report SW GIFT-COFB AAmarvel homesNo ratings yet
- Lab 6 - Finite State MachinesDocument6 pagesLab 6 - Finite State MachinesMr. ARZNo ratings yet
- Ementation RF Monito NG System Fo: FA NEWDocument3 pagesEmentation RF Monito NG System Fo: FA NEWakasheieNo ratings yet
- Experiment 8Document3 pagesExperiment 8MeghaNo ratings yet
- Worklog 5761 SyncDocument14 pagesWorklog 5761 Synctuanhai1989No ratings yet
- The IBM Engiineering Verification EngineDocument7 pagesThe IBM Engiineering Verification Enginesandeep94404No ratings yet
- Multifunction LCDProgram BoxDocument2 pagesMultifunction LCDProgram BoxcapostyperNo ratings yet
- cc2500 ConDocument25 pagescc2500 Conprasad357No ratings yet
- 19ecs431 - Embedded SystemsDocument18 pages19ecs431 - Embedded SystemsNaresh KumarNo ratings yet
- Development of Epics Enabled Alarm Anninciation SystemDocument2 pagesDevelopment of Epics Enabled Alarm Anninciation SystemPartha NandyNo ratings yet
- Design of The ThesisDocument3 pagesDesign of The ThesisKyaw SoeNo ratings yet
- Project Underdamped SystemDocument6 pagesProject Underdamped SystemPablo HenriqueNo ratings yet
- Alpha Mpu Project: General InformationDocument5 pagesAlpha Mpu Project: General Informationprathap13No ratings yet
- Loss 3Phase3Level Inverter HelpDocument3 pagesLoss 3Phase3Level Inverter Helpnani233100% (1)
- MCP 3008Document8 pagesMCP 3008chandrasekar ANo ratings yet
- Pico ScopeDocument16 pagesPico ScopeMarcos CarvalhoNo ratings yet
- Space Vector PWM - 1Document5 pagesSpace Vector PWM - 1guanitouNo ratings yet
- Lab. Manual: Robotics (Enge425)Document24 pagesLab. Manual: Robotics (Enge425)Mohamed AlaaNo ratings yet
- Ecen 248 Lab 9 ReportDocument5 pagesEcen 248 Lab 9 Reportapi-241454978No ratings yet
- Advanced Computer Architecture Pipeline and Branch PredictionDocument8 pagesAdvanced Computer Architecture Pipeline and Branch PredictionsahithNo ratings yet
- Kazuo Sakiyama, Elke de Mulder, Bart Preneel and Ingrid VerbauwhedeDocument4 pagesKazuo Sakiyama, Elke de Mulder, Bart Preneel and Ingrid VerbauwhedesuidhiNo ratings yet
- AS-84.3149 Bionics: Project Work Spring 2008Document12 pagesAS-84.3149 Bionics: Project Work Spring 2008veenadivyakishNo ratings yet
- 05 Branching InstructionsDocument11 pages05 Branching InstructionsneerajNo ratings yet
- Document 10Document23 pagesDocument 10G124Rohit MajiNo ratings yet
- FPGA Lab#1Document8 pagesFPGA Lab#1حساب ويندوزNo ratings yet
- VLSI & Embedded Systems Lab ManualDocument137 pagesVLSI & Embedded Systems Lab Manualganga avinash reddyNo ratings yet
- DLD Lab Report 07Document11 pagesDLD Lab Report 07Muneeb ahmadNo ratings yet
- All About Automatic Neighbor RelationDocument4 pagesAll About Automatic Neighbor RelationDebayan ChakrabortyNo ratings yet
- AN4674-Qorivva Boot Assist Module ApplicationDocument29 pagesAN4674-Qorivva Boot Assist Module ApplicationSAABNo ratings yet
- FPGA-Based Multi Protocol Data Acquisition System With High Speed USB InterfaceDocument4 pagesFPGA-Based Multi Protocol Data Acquisition System With High Speed USB InterfaceVibin MammenNo ratings yet
- CAN FD Data Link Layer With Message Authentication Using Secure Hash Algorithm (SHA-256)Document8 pagesCAN FD Data Link Layer With Message Authentication Using Secure Hash Algorithm (SHA-256)IJRASETPublicationsNo ratings yet
- I2c Bus Master PIC 16FXXDocument61 pagesI2c Bus Master PIC 16FXXCamilo A. InfanteNo ratings yet
- Parsian Team Description For Robocup 2011Document10 pagesParsian Team Description For Robocup 2011Chris 'Whumew' MichalakNo ratings yet
- Lectures Section 3 ModifiedDocument73 pagesLectures Section 3 ModifiedcoventryUkNo ratings yet
- Infineon-CE222306 - PSoC - 4 - I2C - Communication - With - Serial - Communication - Block - (SCB) - Code Example-V03 - 00-ENDocument10 pagesInfineon-CE222306 - PSoC - 4 - I2C - Communication - With - Serial - Communication - Block - (SCB) - Code Example-V03 - 00-ENPiyush Kumar SahooNo ratings yet
- Lec4 Data ManipulationDocument28 pagesLec4 Data ManipulationMaryam KausarNo ratings yet
- 04 ESRVCC Issue Troubleshooting Based On SEQ Platform - NewDocument6 pages04 ESRVCC Issue Troubleshooting Based On SEQ Platform - NewanthonyNo ratings yet
- 64 Bit Parallel Prefix Adder PDFDocument4 pages64 Bit Parallel Prefix Adder PDFNaveen GowdruNo ratings yet
- Lab 4: Motor Control: 1 OverviewDocument7 pagesLab 4: Motor Control: 1 OverviewPaul Emmanuel MarkNo ratings yet
- Response Time of The S1 and X2 Handover Procedures Between (H) Enbs in A Virtualized EnvironmentDocument8 pagesResponse Time of The S1 and X2 Handover Procedures Between (H) Enbs in A Virtualized EnvironmentAnonymous SmYjg7gNo ratings yet
- An 10744Document22 pagesAn 10744Bojana ĐukićNo ratings yet
- Table 1: Control Signals and OpcodesDocument6 pagesTable 1: Control Signals and Opcodesxzlosx1999No ratings yet
- Average Power Analysis EPSDocument25 pagesAverage Power Analysis EPShiqwertyNo ratings yet
- Data Exchanged Between Two SIMATIC S7-200 Devices in PPI ModeDocument5 pagesData Exchanged Between Two SIMATIC S7-200 Devices in PPI ModeagreenstoneNo ratings yet
- Report On Khepera IIIDocument28 pagesReport On Khepera IIIAnkit SinghNo ratings yet
- VHDL Aes ProjectDocument13 pagesVHDL Aes Projecthung kungNo ratings yet
- MPC5xxx Boot Assist Module ApplicationDocument29 pagesMPC5xxx Boot Assist Module ApplicationSAABNo ratings yet
- ED Real LifeDocument8 pagesED Real Lifejiraf_19No ratings yet
- WIBO-THINK Wi-Fi Robot Controller Module: 2-1: Pin DescriptionDocument13 pagesWIBO-THINK Wi-Fi Robot Controller Module: 2-1: Pin DescriptionAbolfazl HabibiNo ratings yet
- Control Systems Lab Hamza 4Document29 pagesControl Systems Lab Hamza 4Muhammad Hamza FarooqNo ratings yet
- UntitledDocument25 pagesUntitledPooja Singh ThakurNo ratings yet
- A New Approach For FEC Decoding Based On The BP Algorithm in LTE and WiMAX SystemsDocument7 pagesA New Approach For FEC Decoding Based On The BP Algorithm in LTE and WiMAX SystemsJAYAPRAKASHNo ratings yet
- Real-Time VLSF Architecture For Video Compression: Fatemi and PanchanathanDocument4 pagesReal-Time VLSF Architecture For Video Compression: Fatemi and Panchanathanकर्म सिंह मलिकNo ratings yet
- 6.5 Gobetwino: Arduino Communicating With Excel: Figure 21: Gobetwino Working ExplanationDocument1 page6.5 Gobetwino: Arduino Communicating With Excel: Figure 21: Gobetwino Working ExplanationRaghu RamanNo ratings yet
- 1N4148 (Do-35) 1N4148. 1N4148 1N4148 A0Document6 pages1N4148 (Do-35) 1N4148. 1N4148 1N4148 A0Raghu RamanNo ratings yet
- Raghu - B.Tech Project-65Document1 pageRaghu - B.Tech Project-65Raghu RamanNo ratings yet
- Raghu - B.Tech Project-55Document1 pageRaghu - B.Tech Project-55Raghu RamanNo ratings yet
- Raghu - B.Tech Project-53Document1 pageRaghu - B.Tech Project-53Raghu RamanNo ratings yet
- Raghu - B.Tech Project-49Document1 pageRaghu - B.Tech Project-49Raghu RamanNo ratings yet
- Raghu - B.Tech Project-56 PDFDocument1 pageRaghu - B.Tech Project-56 PDFRaghu RamanNo ratings yet
- 3.5.3 Proposal of Basic Architecture Over ISO/IEC 15118:: Figure 8: PLC Communication On Control Pilot Line (CPLT)Document1 page3.5.3 Proposal of Basic Architecture Over ISO/IEC 15118:: Figure 8: PLC Communication On Control Pilot Line (CPLT)Raghu RamanNo ratings yet
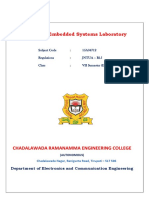
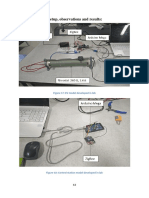
- 6.4 Experimental Setup, Observations and Results:: Figure 17: EV Model Developed in LabDocument1 page6.4 Experimental Setup, Observations and Results:: Figure 17: EV Model Developed in LabRaghu RamanNo ratings yet
- Establishment of A Two Way Communication System Using ZigbeeDocument1 pageEstablishment of A Two Way Communication System Using ZigbeeRaghu RamanNo ratings yet
- Figure 16: Control Station Program (Flowchart)Document1 pageFigure 16: Control Station Program (Flowchart)Raghu RamanNo ratings yet
- 6.2.3 Interfacing The Zigbee Transceivers With The ArduinoDocument1 page6.2.3 Interfacing The Zigbee Transceivers With The ArduinoRaghu RamanNo ratings yet
- 6.2.2 Configuring The Zigbee TransceiversDocument1 page6.2.2 Configuring The Zigbee TransceiversRaghu RamanNo ratings yet
- Raghu - B.Tech Project-48 PDFDocument1 pageRaghu - B.Tech Project-48 PDFRaghu RamanNo ratings yet
- 6.2 Hardware Implementation of The Two-Way Communication:: 6.2.1 Apparatus UsedDocument1 page6.2 Hardware Implementation of The Two-Way Communication:: 6.2.1 Apparatus UsedRaghu RamanNo ratings yet
- Figure 13: Block Diagram Representing The Two Way Communication Between The EV and The Smart Grid ServerDocument1 pageFigure 13: Block Diagram Representing The Two Way Communication Between The EV and The Smart Grid ServerRaghu RamanNo ratings yet
- 5.4 Overview of SOC Estimating Mathematical Methods:: 5.4.1 Open Circuit Voltage MethodDocument1 page5.4 Overview of SOC Estimating Mathematical Methods:: 5.4.1 Open Circuit Voltage MethodRaghu RamanNo ratings yet
- 5.2 State of Charge:: Figure 12: General Layout of An OCV-curveDocument1 page5.2 State of Charge:: Figure 12: General Layout of An OCV-curveRaghu RamanNo ratings yet
- Figure 11: Block Diagram of A Battery SystemDocument1 pageFigure 11: Block Diagram of A Battery SystemRaghu RamanNo ratings yet
- Raghu - B.Tech Project-29Document1 pageRaghu - B.Tech Project-29Raghu RamanNo ratings yet
- 5.4.2 Terminal Voltage MethodDocument1 page5.4.2 Terminal Voltage MethodRaghu RamanNo ratings yet
- 3.5.2 Architecture of Iso/Iec 15118 V2Iog:: Figure 6: Pilot Signal StatesDocument1 page3.5.2 Architecture of Iso/Iec 15118 V2Iog:: Figure 6: Pilot Signal StatesRaghu RamanNo ratings yet
- 5.3 The State of Charge Estimating Methods For Battery:: 5.3.1 Definition and Classification of SOC EstimationDocument1 page5.3 The State of Charge Estimating Methods For Battery:: 5.3.1 Definition and Classification of SOC EstimationRaghu RamanNo ratings yet
- Raghu - B.Tech Project-35Document1 pageRaghu - B.Tech Project-35Raghu RamanNo ratings yet
- 4.2.3 Cellular Network Communication:: Table 4: Smart Gird Communications TechnologiesDocument1 page4.2.3 Cellular Network Communication:: Table 4: Smart Gird Communications TechnologiesRaghu RamanNo ratings yet
- 4.2 Communications Technologies Available For Smart Grids:: 4.2.1 ZigbeeDocument1 page4.2 Communications Technologies Available For Smart Grids:: 4.2.1 ZigbeeRaghu RamanNo ratings yet