
2013 Grand Am Rolex Series Bosch ECU Integration: Motorsport
2013 Grand Am Rolex Series Bosch ECU Integration: Motorsport
You might also like
- PF RipDeck GuideDocument4 pagesPF RipDeck GuideDerek Hadge100% (1)
- Diagnostics With INPADocument28 pagesDiagnostics With INPADaniel Vanden BulckeNo ratings yet
- 2009 Corvette Professional PDFDocument398 pages2009 Corvette Professional PDFDavid BaylissNo ratings yet
- Lattc TranscriptsDocument2 pagesLattc TranscriptsJorge DevottoNo ratings yet
- Team Manager's One-Day Tournament HandbookDocument24 pagesTeam Manager's One-Day Tournament HandbookDeeyana DeenNo ratings yet
- Openecu User Guide Simulink 3 1 0Document681 pagesOpenecu User Guide Simulink 3 1 0Adam TanNo ratings yet
- New Features Diagnosis ISTA Version 4.01Document5 pagesNew Features Diagnosis ISTA Version 4.01tommyarbiNo ratings yet
- E-Sys - Installation Instructions - v.15Document5 pagesE-Sys - Installation Instructions - v.15Nick LesterNo ratings yet
- Fstool Installation ReadmeDocument1 pageFstool Installation Readmeal chenNo ratings yet
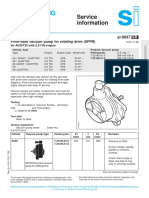
- Vakuumpumpe VAG 2,5 TDI V6 SI - 0037Document1 pageVakuumpumpe VAG 2,5 TDI V6 SI - 0037gilbertogatoNo ratings yet
- Bosch Ebike System Model OverviewDocument2 pagesBosch Ebike System Model Overviewkonjuslav0% (1)
- E9x Alpina B3 Trans FlashDocument4 pagesE9x Alpina B3 Trans FlashFreezzbyNo ratings yet
- 2015 991 Cup - Parts CatalogueDocument168 pages2015 991 Cup - Parts CatalogueDavid Bayliss100% (1)
- Year 3 Making Simple Sentences WorksheetDocument10 pagesYear 3 Making Simple Sentences WorksheetDaniel Chan Kok WengNo ratings yet
- Dme 1.1 1.3Document7 pagesDme 1.1 1.3Minas HarutyunyanNo ratings yet
- BMW WiringDocument271 pagesBMW WiringAkhundjanov RakhimNo ratings yet
- Motec M4 - M48 - M8 - Manual - A5Document63 pagesMotec M4 - M48 - M8 - Manual - A5Melissa TanNo ratings yet
- Schimbare Baterie E90Document3 pagesSchimbare Baterie E90Andrei PavelNo ratings yet
- The Manual of Universal Digital IgnitionDocument25 pagesThe Manual of Universal Digital IgnitionAnthonCardozoNo ratings yet
- Manual: Application Note Flash Programming TricoreDocument37 pagesManual: Application Note Flash Programming TricoreSantosh JakkaniNo ratings yet
- 03 - F30H Complete VehicleDocument106 pages03 - F30H Complete VehiclePepo MenéndezNo ratings yet
- Audi Multiport Fuel InjectionDocument366 pagesAudi Multiport Fuel InjectionRaheel Farouk100% (1)
- ST1102 Advanced Vehicle DiagnosisDocument275 pagesST1102 Advanced Vehicle DiagnosisAlabê Gabriel de OssainNo ratings yet
- Mo TronicDocument2 pagesMo TronicdromakiNo ratings yet
- E60 Cas3 PDFDocument15 pagesE60 Cas3 PDFjoker63000No ratings yet
- E46SedanRetrofit InstallationkitDocument10 pagesE46SedanRetrofit InstallationkitFranczia RichardNo ratings yet
- FT350 FT400 V17 PDFDocument60 pagesFT350 FT400 V17 PDFМирослав КарановићNo ratings yet
- KAFAS System and Diagrams PDFDocument31 pagesKAFAS System and Diagrams PDFUgochukwu EnyiohaNo ratings yet
- Traction Control Systems (TCS) Does Your Shop Need A Dvom?: - The Opposite of ABSDocument11 pagesTraction Control Systems (TCS) Does Your Shop Need A Dvom?: - The Opposite of ABSPutu Budi DharmaNo ratings yet
- Engine Codes ARL, ASZ, AXR: Item ItemDocument2 pagesEngine Codes ARL, ASZ, AXR: Item ItemLaurentiu GlavanNo ratings yet
- Siemens Msv70 BMWDocument2 pagesSiemens Msv70 BMWrubenbslNo ratings yet
- Arduino-Based OBD-II Interface and Data LoggerDocument30 pagesArduino-Based OBD-II Interface and Data Loggermathhoang100% (2)
- Opel Motronic2.5 PDFDocument5 pagesOpel Motronic2.5 PDFjesrafNo ratings yet
- Maf Sensor ArticleDocument2 pagesMaf Sensor Articleapi-406895548No ratings yet
- 6-Cylinder Injection Engine 3.2LDocument201 pages6-Cylinder Injection Engine 3.2Lberenice togaNo ratings yet
- Bosch Motorsport ECU MS 15 Sport Calibration GuideDocument107 pagesBosch Motorsport ECU MS 15 Sport Calibration GuideMauricio Navarro santanaNo ratings yet
- Feuille1: Model Chassis Engine Type YearDocument98 pagesFeuille1: Model Chassis Engine Type YearmaitrefouNo ratings yet
- Service Manual: LC-32A33T LC-37A33TDocument38 pagesService Manual: LC-32A33T LC-37A33TSetiawan Abdul RochimNo ratings yet
- Volkswagen Spares CatalogueDocument44 pagesVolkswagen Spares CatalogueBAD KINGNo ratings yet
- Microtronik: Supported Ecu Clone List Hexprog Version: 1.0.8Document5 pagesMicrotronik: Supported Ecu Clone List Hexprog Version: 1.0.8techpsa100% (1)
- SEW EURODRIVE Wiring Diagrams (New)Document30 pagesSEW EURODRIVE Wiring Diagrams (New)Simon Tolomeo100% (1)
- BMW 7 Series (G12) 2016+ Technical Doc - Telephone and Telematics SystemsDocument64 pagesBMW 7 Series (G12) 2016+ Technical Doc - Telephone and Telematics SystemsPhan VănNo ratings yet
- BMW 3 Series E90 318D Stage 3 M47Document3 pagesBMW 3 Series E90 318D Stage 3 M47hosterobinNo ratings yet
- BMW AirbagDocument16 pagesBMW AirbagDjLandiNo ratings yet
- Crankcase Ventilation System Diagnosis and Measurement Technical Service BulletinDocument5 pagesCrankcase Ventilation System Diagnosis and Measurement Technical Service Bulletinonukvedat7219No ratings yet
- Product Information.: Technical Training. F01/F02 LCI InfotainmentDocument30 pagesProduct Information.: Technical Training. F01/F02 LCI InfotainmentmunkarobertNo ratings yet
- Ford Tdci Tuning: How To ModifyDocument3 pagesFord Tdci Tuning: How To ModifydutzupppNo ratings yet
- Canems Injection Manual PDFDocument66 pagesCanems Injection Manual PDFPeter McCrackenNo ratings yet
- 11a E65 Power ModuleDocument34 pages11a E65 Power Modulemarko guberinicNo ratings yet
- BMW EngineDocument6 pagesBMW EngineDmitry PetrenkoNo ratings yet
- Welcome To ST055 Engine Electronics!Document88 pagesWelcome To ST055 Engine Electronics!SalisburNo ratings yet
- T5Suite2 User ManualDocument42 pagesT5Suite2 User Manualesteiro4No ratings yet
- L Jetronic PinoutDocument3 pagesL Jetronic PinoutHlias AlafogiannisNo ratings yet
- BMW CAS4Document7 pagesBMW CAS4misternikiNo ratings yet
- BOSCH ME72 Systems PDFDocument56 pagesBOSCH ME72 Systems PDFNiko BalovNo ratings yet
- Catalyst-Based Diesel Particulate Filters and Nox Adsorbers: A Summary of The Technologies and The Effects of Fuel SulfurDocument31 pagesCatalyst-Based Diesel Particulate Filters and Nox Adsorbers: A Summary of The Technologies and The Effects of Fuel SulfurArjun ChandranNo ratings yet
- EDC15PSuite ManualDocument31 pagesEDC15PSuite ManualWmadNo ratings yet
- KW2000 Supported ServicesDocument51 pagesKW2000 Supported Servicesmsnshr100% (1)
- Inpa Ediabas UserDocument59 pagesInpa Ediabas UsergoogleheadNo ratings yet
- Diverse Small Parts BMW E60 Sedan 47750Document2 pagesDiverse Small Parts BMW E60 Sedan 47750Kifah ZaidanNo ratings yet
- Alpine EgsDocument1 pageAlpine EgsJaroslav KolentNo ratings yet
- Installers Guide To The Bose Serial Interface For Bose AV20, AV35 and AVM Home Theater Control ConsolesDocument42 pagesInstallers Guide To The Bose Serial Interface For Bose AV20, AV35 and AVM Home Theater Control ConsolesMichael SinclairNo ratings yet
- BMW 4 Series Coupe Product GuideDocument14 pagesBMW 4 Series Coupe Product Guideapi-246813304No ratings yet
- E46M54ENGSDocument49 pagesE46M54ENGSEd MoralesNo ratings yet
- 2010 Corvette Professional PDFDocument395 pages2010 Corvette Professional PDFDavid BaylissNo ratings yet
- 2011 EarlscatalogDocument148 pages2011 EarlscatalogDavid BaylissNo ratings yet
- 2014 Indycar Rule BookDocument261 pages2014 Indycar Rule BookDavid BaylissNo ratings yet
- CPC Contact Arrangements (Series 1)Document1 pageCPC Contact Arrangements (Series 1)David BaylissNo ratings yet
- 2011 Corvette ProfessionalDocument394 pages2011 Corvette ProfessionalDavid BaylissNo ratings yet
- 0823xxx - NORCLAMP - 212 - enDocument2 pages0823xxx - NORCLAMP - 212 - enDavid BaylissNo ratings yet
- 300particulate PDFDocument2 pages300particulate PDFDavid BaylissNo ratings yet
- 300 MonitorDocument2 pages300 MonitorDavid BaylissNo ratings yet
- 1863 Eastman Ave. Ventura, Ca. 93003 1863 Eastman Ave. Ventura, Ca. 93003Document1 page1863 Eastman Ave. Ventura, Ca. 93003 1863 Eastman Ave. Ventura, Ca. 93003David BaylissNo ratings yet
- Holley® Hydramat KitsDocument8 pagesHolley® Hydramat KitsDavid BaylissNo ratings yet
- Installation Instructions: 5.5" (140 MM) and 7.25" (185 MM) Carbon ClutchesDocument4 pagesInstallation Instructions: 5.5" (140 MM) and 7.25" (185 MM) Carbon ClutchesDavid BaylissNo ratings yet
- Tuning Manual Tuning Manual Tuning Manual Tuning ManualDocument62 pagesTuning Manual Tuning Manual Tuning Manual Tuning ManualDavid BaylissNo ratings yet
- HP Efi Smart Coil Sub Harness P/N 558-312: The Cylinder Heads and Keep That Wire As Short As PossibleDocument2 pagesHP Efi Smart Coil Sub Harness P/N 558-312: The Cylinder Heads and Keep That Wire As Short As PossibleDavid BaylissNo ratings yet
- Connector A - Black Connector B - Grey 034efi Stage Iic Ecu Connector Pinout - 5.19.06Document1 pageConnector A - Black Connector B - Grey 034efi Stage Iic Ecu Connector Pinout - 5.19.06David BaylissNo ratings yet
- Misting: 64 Accessories 69 DimensionsDocument2 pagesMisting: 64 Accessories 69 DimensionsDavid Bayliss0% (1)
- 30-2012 Water Temp Sensor KitDocument2 pages30-2012 Water Temp Sensor KitDavid BaylissNo ratings yet
- 30-2340 4-Channel Wideband UEGO AFR ControllerDocument30 pages30-2340 4-Channel Wideband UEGO AFR ControllerDavid BaylissNo ratings yet
- TOMEI Camshaft Spec Card TOMEI Camshaft Spec Card TOMEI Camshaft Spec CardDocument1 pageTOMEI Camshaft Spec Card TOMEI Camshaft Spec Card TOMEI Camshaft Spec CardDavid BaylissNo ratings yet
- TOMEI Camshaft Spec Card TOMEI Camshaft Spec Card TOMEI Camshaft Spec CardDocument1 pageTOMEI Camshaft Spec Card TOMEI Camshaft Spec Card TOMEI Camshaft Spec CardDavid BaylissNo ratings yet
- TOMEI Camshaft Spec Card TOMEI Camshaft Spec Card TOMEI Camshaft Spec CardDocument1 pageTOMEI Camshaft Spec Card TOMEI Camshaft Spec Card TOMEI Camshaft Spec CardDavid BaylissNo ratings yet
- Breakout in Greenfoot: Barb Ericson Ericson@cc - Gatech.edu Georgia Institute of Technology September 2010Document16 pagesBreakout in Greenfoot: Barb Ericson Ericson@cc - Gatech.edu Georgia Institute of Technology September 2010Maya EndahNo ratings yet
- Fita Coaching Barebow PDFDocument12 pagesFita Coaching Barebow PDFDwight Anthony YuNo ratings yet
- 2013 Murphy ShowDocument12 pages2013 Murphy Showapi-148958978No ratings yet
- The Benefits and Facts About Chamblee JrotcDocument1 pageThe Benefits and Facts About Chamblee Jrotcapi-682286406No ratings yet
- Section 7 Electrical SystemDocument3 pagesSection 7 Electrical Systemmohamed omerNo ratings yet
- DownloadDocument4 pagesDownloadapi-269223052No ratings yet
- Pe1 Module 3Document7 pagesPe1 Module 3Albert Fabros GapasinNo ratings yet
- 2002 Winch Ester CatalogDocument52 pages2002 Winch Ester Catalogoemiranda100% (1)
- JUDO - Under 17 - FINALDocument4 pagesJUDO - Under 17 - FINALsahil singhNo ratings yet
- Yuji Itadori Based WorkoutDocument8 pagesYuji Itadori Based WorkoutVengence GamingNo ratings yet
- Arthritis AdviceDocument6 pagesArthritis Adviceapi-309082881No ratings yet
- Think Starter Test1Document2 pagesThink Starter Test1kpjfNo ratings yet
- K.Anh - Upgrade 3 UNIT 4Document2 pagesK.Anh - Upgrade 3 UNIT 4HameeyNo ratings yet
- Team Building GuidelinesDocument7 pagesTeam Building GuidelinesJoey MaravillasNo ratings yet
- Louie Simmons Deadlift ProgrammingDocument2 pagesLouie Simmons Deadlift Programminglw98100% (1)
- Nueva Base de Datos Ago21Document91 pagesNueva Base de Datos Ago21EderNo ratings yet
- Diving E: Look, Read and ChooseDocument2 pagesDiving E: Look, Read and ChooseFreddy MuñozNo ratings yet
- Insomnia Book Part 2Document4 pagesInsomnia Book Part 2prasannakuber100% (1)
- IronmongeryDocument8 pagesIronmongeryChaiYingHNo ratings yet
- 12 Chinese Martial Arts (Kung Fu) (PDFDrive)Document106 pages12 Chinese Martial Arts (Kung Fu) (PDFDrive)i_firefighter100% (2)
- Final Mi PretzyDocument33 pagesFinal Mi PretzyEDETH SUBONGNo ratings yet
- Rla Hotel Project Ground Floor Lux Level Report 24.01.2024Document105 pagesRla Hotel Project Ground Floor Lux Level Report 24.01.2024anuragadhikary69No ratings yet
- Coaching & Sport Science ReviewDocument32 pagesCoaching & Sport Science ReviewacmcNo ratings yet
- Teaching Kendo To Beginners: Dublin Kendo Kobukai Spring 2005Document9 pagesTeaching Kendo To Beginners: Dublin Kendo Kobukai Spring 2005samsagaz22No ratings yet
- Adventure Maximum Core RulesDocument114 pagesAdventure Maximum Core RuleswegrEdsNo ratings yet
- The GERUND AndcompoundnounDocument7 pagesThe GERUND AndcompoundnounJannice Coscolluela CanlasNo ratings yet














































































































Download as pdf or txt
You might also like
- PF RipDeck GuideDocument4 pagesPF RipDeck GuideDerek Hadge100% (1)
- Diagnostics With INPADocument28 pagesDiagnostics With INPADaniel Vanden BulckeNo ratings yet
- 2009 Corvette Professional PDFDocument398 pages2009 Corvette Professional PDFDavid BaylissNo ratings yet
- Lattc TranscriptsDocument2 pagesLattc TranscriptsJorge DevottoNo ratings yet
- Team Manager's One-Day Tournament HandbookDocument24 pagesTeam Manager's One-Day Tournament HandbookDeeyana DeenNo ratings yet
- Openecu User Guide Simulink 3 1 0Document681 pagesOpenecu User Guide Simulink 3 1 0Adam TanNo ratings yet
- New Features Diagnosis ISTA Version 4.01Document5 pagesNew Features Diagnosis ISTA Version 4.01tommyarbiNo ratings yet
- E-Sys - Installation Instructions - v.15Document5 pagesE-Sys - Installation Instructions - v.15Nick LesterNo ratings yet
- Fstool Installation ReadmeDocument1 pageFstool Installation Readmeal chenNo ratings yet
- Vakuumpumpe VAG 2,5 TDI V6 SI - 0037Document1 pageVakuumpumpe VAG 2,5 TDI V6 SI - 0037gilbertogatoNo ratings yet
- Bosch Ebike System Model OverviewDocument2 pagesBosch Ebike System Model Overviewkonjuslav0% (1)
- E9x Alpina B3 Trans FlashDocument4 pagesE9x Alpina B3 Trans FlashFreezzbyNo ratings yet
- 2015 991 Cup - Parts CatalogueDocument168 pages2015 991 Cup - Parts CatalogueDavid Bayliss100% (1)
- Year 3 Making Simple Sentences WorksheetDocument10 pagesYear 3 Making Simple Sentences WorksheetDaniel Chan Kok WengNo ratings yet
- Dme 1.1 1.3Document7 pagesDme 1.1 1.3Minas HarutyunyanNo ratings yet
- BMW WiringDocument271 pagesBMW WiringAkhundjanov RakhimNo ratings yet
- Motec M4 - M48 - M8 - Manual - A5Document63 pagesMotec M4 - M48 - M8 - Manual - A5Melissa TanNo ratings yet
- Schimbare Baterie E90Document3 pagesSchimbare Baterie E90Andrei PavelNo ratings yet
- The Manual of Universal Digital IgnitionDocument25 pagesThe Manual of Universal Digital IgnitionAnthonCardozoNo ratings yet
- Manual: Application Note Flash Programming TricoreDocument37 pagesManual: Application Note Flash Programming TricoreSantosh JakkaniNo ratings yet
- 03 - F30H Complete VehicleDocument106 pages03 - F30H Complete VehiclePepo MenéndezNo ratings yet
- Audi Multiport Fuel InjectionDocument366 pagesAudi Multiport Fuel InjectionRaheel Farouk100% (1)
- ST1102 Advanced Vehicle DiagnosisDocument275 pagesST1102 Advanced Vehicle DiagnosisAlabê Gabriel de OssainNo ratings yet
- Mo TronicDocument2 pagesMo TronicdromakiNo ratings yet
- E60 Cas3 PDFDocument15 pagesE60 Cas3 PDFjoker63000No ratings yet
- E46SedanRetrofit InstallationkitDocument10 pagesE46SedanRetrofit InstallationkitFranczia RichardNo ratings yet
- FT350 FT400 V17 PDFDocument60 pagesFT350 FT400 V17 PDFМирослав КарановићNo ratings yet
- KAFAS System and Diagrams PDFDocument31 pagesKAFAS System and Diagrams PDFUgochukwu EnyiohaNo ratings yet
- Traction Control Systems (TCS) Does Your Shop Need A Dvom?: - The Opposite of ABSDocument11 pagesTraction Control Systems (TCS) Does Your Shop Need A Dvom?: - The Opposite of ABSPutu Budi DharmaNo ratings yet
- Engine Codes ARL, ASZ, AXR: Item ItemDocument2 pagesEngine Codes ARL, ASZ, AXR: Item ItemLaurentiu GlavanNo ratings yet
- Siemens Msv70 BMWDocument2 pagesSiemens Msv70 BMWrubenbslNo ratings yet
- Arduino-Based OBD-II Interface and Data LoggerDocument30 pagesArduino-Based OBD-II Interface and Data Loggermathhoang100% (2)
- Opel Motronic2.5 PDFDocument5 pagesOpel Motronic2.5 PDFjesrafNo ratings yet
- Maf Sensor ArticleDocument2 pagesMaf Sensor Articleapi-406895548No ratings yet
- 6-Cylinder Injection Engine 3.2LDocument201 pages6-Cylinder Injection Engine 3.2Lberenice togaNo ratings yet
- Bosch Motorsport ECU MS 15 Sport Calibration GuideDocument107 pagesBosch Motorsport ECU MS 15 Sport Calibration GuideMauricio Navarro santanaNo ratings yet
- Feuille1: Model Chassis Engine Type YearDocument98 pagesFeuille1: Model Chassis Engine Type YearmaitrefouNo ratings yet
- Service Manual: LC-32A33T LC-37A33TDocument38 pagesService Manual: LC-32A33T LC-37A33TSetiawan Abdul RochimNo ratings yet
- Volkswagen Spares CatalogueDocument44 pagesVolkswagen Spares CatalogueBAD KINGNo ratings yet
- Microtronik: Supported Ecu Clone List Hexprog Version: 1.0.8Document5 pagesMicrotronik: Supported Ecu Clone List Hexprog Version: 1.0.8techpsa100% (1)
- SEW EURODRIVE Wiring Diagrams (New)Document30 pagesSEW EURODRIVE Wiring Diagrams (New)Simon Tolomeo100% (1)
- BMW 7 Series (G12) 2016+ Technical Doc - Telephone and Telematics SystemsDocument64 pagesBMW 7 Series (G12) 2016+ Technical Doc - Telephone and Telematics SystemsPhan VănNo ratings yet
- BMW 3 Series E90 318D Stage 3 M47Document3 pagesBMW 3 Series E90 318D Stage 3 M47hosterobinNo ratings yet
- BMW AirbagDocument16 pagesBMW AirbagDjLandiNo ratings yet
- Crankcase Ventilation System Diagnosis and Measurement Technical Service BulletinDocument5 pagesCrankcase Ventilation System Diagnosis and Measurement Technical Service Bulletinonukvedat7219No ratings yet
- Product Information.: Technical Training. F01/F02 LCI InfotainmentDocument30 pagesProduct Information.: Technical Training. F01/F02 LCI InfotainmentmunkarobertNo ratings yet
- Ford Tdci Tuning: How To ModifyDocument3 pagesFord Tdci Tuning: How To ModifydutzupppNo ratings yet
- Canems Injection Manual PDFDocument66 pagesCanems Injection Manual PDFPeter McCrackenNo ratings yet
- 11a E65 Power ModuleDocument34 pages11a E65 Power Modulemarko guberinicNo ratings yet
- BMW EngineDocument6 pagesBMW EngineDmitry PetrenkoNo ratings yet
- Welcome To ST055 Engine Electronics!Document88 pagesWelcome To ST055 Engine Electronics!SalisburNo ratings yet
- T5Suite2 User ManualDocument42 pagesT5Suite2 User Manualesteiro4No ratings yet
- L Jetronic PinoutDocument3 pagesL Jetronic PinoutHlias AlafogiannisNo ratings yet
- BMW CAS4Document7 pagesBMW CAS4misternikiNo ratings yet
- BOSCH ME72 Systems PDFDocument56 pagesBOSCH ME72 Systems PDFNiko BalovNo ratings yet
- Catalyst-Based Diesel Particulate Filters and Nox Adsorbers: A Summary of The Technologies and The Effects of Fuel SulfurDocument31 pagesCatalyst-Based Diesel Particulate Filters and Nox Adsorbers: A Summary of The Technologies and The Effects of Fuel SulfurArjun ChandranNo ratings yet
- EDC15PSuite ManualDocument31 pagesEDC15PSuite ManualWmadNo ratings yet
- KW2000 Supported ServicesDocument51 pagesKW2000 Supported Servicesmsnshr100% (1)
- Inpa Ediabas UserDocument59 pagesInpa Ediabas UsergoogleheadNo ratings yet
- Diverse Small Parts BMW E60 Sedan 47750Document2 pagesDiverse Small Parts BMW E60 Sedan 47750Kifah ZaidanNo ratings yet
- Alpine EgsDocument1 pageAlpine EgsJaroslav KolentNo ratings yet
- Installers Guide To The Bose Serial Interface For Bose AV20, AV35 and AVM Home Theater Control ConsolesDocument42 pagesInstallers Guide To The Bose Serial Interface For Bose AV20, AV35 and AVM Home Theater Control ConsolesMichael SinclairNo ratings yet
- BMW 4 Series Coupe Product GuideDocument14 pagesBMW 4 Series Coupe Product Guideapi-246813304No ratings yet
- E46M54ENGSDocument49 pagesE46M54ENGSEd MoralesNo ratings yet
- 2010 Corvette Professional PDFDocument395 pages2010 Corvette Professional PDFDavid BaylissNo ratings yet
- 2011 EarlscatalogDocument148 pages2011 EarlscatalogDavid BaylissNo ratings yet
- 2014 Indycar Rule BookDocument261 pages2014 Indycar Rule BookDavid BaylissNo ratings yet
- CPC Contact Arrangements (Series 1)Document1 pageCPC Contact Arrangements (Series 1)David BaylissNo ratings yet
- 2011 Corvette ProfessionalDocument394 pages2011 Corvette ProfessionalDavid BaylissNo ratings yet
- 0823xxx - NORCLAMP - 212 - enDocument2 pages0823xxx - NORCLAMP - 212 - enDavid BaylissNo ratings yet
- 300particulate PDFDocument2 pages300particulate PDFDavid BaylissNo ratings yet
- 300 MonitorDocument2 pages300 MonitorDavid BaylissNo ratings yet
- 1863 Eastman Ave. Ventura, Ca. 93003 1863 Eastman Ave. Ventura, Ca. 93003Document1 page1863 Eastman Ave. Ventura, Ca. 93003 1863 Eastman Ave. Ventura, Ca. 93003David BaylissNo ratings yet
- Holley® Hydramat KitsDocument8 pagesHolley® Hydramat KitsDavid BaylissNo ratings yet
- Installation Instructions: 5.5" (140 MM) and 7.25" (185 MM) Carbon ClutchesDocument4 pagesInstallation Instructions: 5.5" (140 MM) and 7.25" (185 MM) Carbon ClutchesDavid BaylissNo ratings yet
- Tuning Manual Tuning Manual Tuning Manual Tuning ManualDocument62 pagesTuning Manual Tuning Manual Tuning Manual Tuning ManualDavid BaylissNo ratings yet
- HP Efi Smart Coil Sub Harness P/N 558-312: The Cylinder Heads and Keep That Wire As Short As PossibleDocument2 pagesHP Efi Smart Coil Sub Harness P/N 558-312: The Cylinder Heads and Keep That Wire As Short As PossibleDavid BaylissNo ratings yet
- Connector A - Black Connector B - Grey 034efi Stage Iic Ecu Connector Pinout - 5.19.06Document1 pageConnector A - Black Connector B - Grey 034efi Stage Iic Ecu Connector Pinout - 5.19.06David BaylissNo ratings yet
- Misting: 64 Accessories 69 DimensionsDocument2 pagesMisting: 64 Accessories 69 DimensionsDavid Bayliss0% (1)
- 30-2012 Water Temp Sensor KitDocument2 pages30-2012 Water Temp Sensor KitDavid BaylissNo ratings yet
- 30-2340 4-Channel Wideband UEGO AFR ControllerDocument30 pages30-2340 4-Channel Wideband UEGO AFR ControllerDavid BaylissNo ratings yet
- TOMEI Camshaft Spec Card TOMEI Camshaft Spec Card TOMEI Camshaft Spec CardDocument1 pageTOMEI Camshaft Spec Card TOMEI Camshaft Spec Card TOMEI Camshaft Spec CardDavid BaylissNo ratings yet
- TOMEI Camshaft Spec Card TOMEI Camshaft Spec Card TOMEI Camshaft Spec CardDocument1 pageTOMEI Camshaft Spec Card TOMEI Camshaft Spec Card TOMEI Camshaft Spec CardDavid BaylissNo ratings yet
- TOMEI Camshaft Spec Card TOMEI Camshaft Spec Card TOMEI Camshaft Spec CardDocument1 pageTOMEI Camshaft Spec Card TOMEI Camshaft Spec Card TOMEI Camshaft Spec CardDavid BaylissNo ratings yet
- Breakout in Greenfoot: Barb Ericson Ericson@cc - Gatech.edu Georgia Institute of Technology September 2010Document16 pagesBreakout in Greenfoot: Barb Ericson Ericson@cc - Gatech.edu Georgia Institute of Technology September 2010Maya EndahNo ratings yet
- Fita Coaching Barebow PDFDocument12 pagesFita Coaching Barebow PDFDwight Anthony YuNo ratings yet
- 2013 Murphy ShowDocument12 pages2013 Murphy Showapi-148958978No ratings yet
- The Benefits and Facts About Chamblee JrotcDocument1 pageThe Benefits and Facts About Chamblee Jrotcapi-682286406No ratings yet
- Section 7 Electrical SystemDocument3 pagesSection 7 Electrical Systemmohamed omerNo ratings yet
- DownloadDocument4 pagesDownloadapi-269223052No ratings yet
- Pe1 Module 3Document7 pagesPe1 Module 3Albert Fabros GapasinNo ratings yet
- 2002 Winch Ester CatalogDocument52 pages2002 Winch Ester Catalogoemiranda100% (1)
- JUDO - Under 17 - FINALDocument4 pagesJUDO - Under 17 - FINALsahil singhNo ratings yet
- Yuji Itadori Based WorkoutDocument8 pagesYuji Itadori Based WorkoutVengence GamingNo ratings yet
- Arthritis AdviceDocument6 pagesArthritis Adviceapi-309082881No ratings yet
- Think Starter Test1Document2 pagesThink Starter Test1kpjfNo ratings yet
- K.Anh - Upgrade 3 UNIT 4Document2 pagesK.Anh - Upgrade 3 UNIT 4HameeyNo ratings yet
- Team Building GuidelinesDocument7 pagesTeam Building GuidelinesJoey MaravillasNo ratings yet
- Louie Simmons Deadlift ProgrammingDocument2 pagesLouie Simmons Deadlift Programminglw98100% (1)
- Nueva Base de Datos Ago21Document91 pagesNueva Base de Datos Ago21EderNo ratings yet
- Diving E: Look, Read and ChooseDocument2 pagesDiving E: Look, Read and ChooseFreddy MuñozNo ratings yet
- Insomnia Book Part 2Document4 pagesInsomnia Book Part 2prasannakuber100% (1)
- IronmongeryDocument8 pagesIronmongeryChaiYingHNo ratings yet
- 12 Chinese Martial Arts (Kung Fu) (PDFDrive)Document106 pages12 Chinese Martial Arts (Kung Fu) (PDFDrive)i_firefighter100% (2)
- Final Mi PretzyDocument33 pagesFinal Mi PretzyEDETH SUBONGNo ratings yet
- Rla Hotel Project Ground Floor Lux Level Report 24.01.2024Document105 pagesRla Hotel Project Ground Floor Lux Level Report 24.01.2024anuragadhikary69No ratings yet
- Coaching & Sport Science ReviewDocument32 pagesCoaching & Sport Science ReviewacmcNo ratings yet
- Teaching Kendo To Beginners: Dublin Kendo Kobukai Spring 2005Document9 pagesTeaching Kendo To Beginners: Dublin Kendo Kobukai Spring 2005samsagaz22No ratings yet
- Adventure Maximum Core RulesDocument114 pagesAdventure Maximum Core RuleswegrEdsNo ratings yet
- The GERUND AndcompoundnounDocument7 pagesThe GERUND AndcompoundnounJannice Coscolluela CanlasNo ratings yet